 ARB5系列電弧光保護在風力發電機中的應用
ARB5系列電弧光保護在風力發電機中的應用
1.1?依據機組容量劃分
風力發電系統如果是依照機組的容量進行劃分,一般可以分為四種類型,這四種類型的容量也存在一定的差異性。第一種:小型機組。這種類型的機組容量一般在0.1~1kW。第二種:中型機組。這種類型的機組容量一般在1~1000kW。第三種:大型機組。這種類型的機組容量一般在1~10MW。第四種:巨型機組。這種類型的機組容量一般在10MW以上。
1.2?依據發電機運行特征及控制方式劃分
如果是依照發電機的運行特征,或者是依照發電機的控制方式,來進行劃分,一般能夠分為兩種。第一種是變速恒頻風力發電系統。這種系統的風力機,其轉速一般是能夠進行調節的,并且能夠從一定程度上合理利用風能來提升系統的發電率。第二種是恒速恒頻風力發電系統。這種系統在當今時期使用的比較少,這一類型的系統雖然使用起來比較便捷,但是,對于風能的利用率一般比較低,且發電率往往也不高,存在一定的不足。
1.3?運行方式分類
依照風力發電的運行方式來進行分類,一般可以分為兩種類型。首先,是并網型風力發電系統。這種系統和一般的發電模式相同,一般需要利用大電網來提升對風能的利用率。其優勢是費用較低,在當前這一時期中是比較常見的。其次,是離網型風力發電系統。這種發電系統一般是獨立運行的,并且這一系統的容量比較小。在一般的城鄉公路中會比較常見此種系統。
弧光保護原理
2.1電弧光的產生
電弧光是氣體放電的最終形式。當圍繞氣體原子的電子被電離為等離子體后,稱為游離的自由電子,并在外界因素或較高電場作用下向外輻射電磁波,這種在放電通道周圍向外輻射的電磁波就是電弧光。
2.2弧光傳感器
弧光傳感器是一種光感應元件。當發生短路產生弧光時,光的強度將突然增加,弧光傳感器內電子元件就會將光信號轉換為電信號,通過專用光纖將光信號傳送給弧光采集單元或弧光保護單元,光電轉換在弧光采集單元或弧光保護單元完成,從而對后續的動作作出判據支撐。弧光傳感器應具有抗干擾能力強、光學計量精度準確、可靠性高等特點。
2.3快速性保護
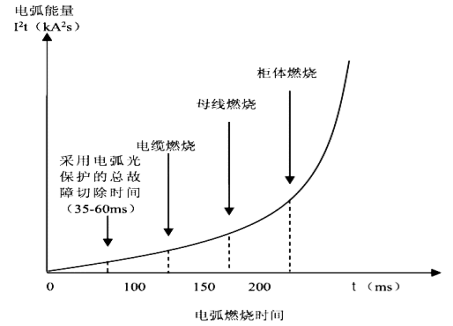
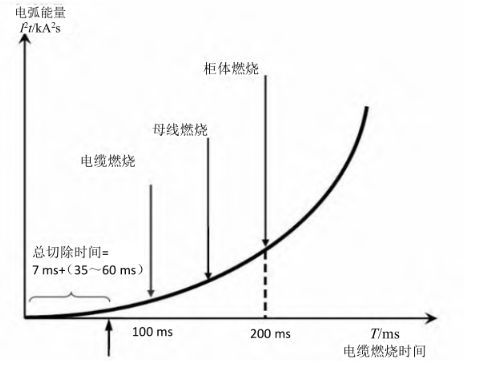
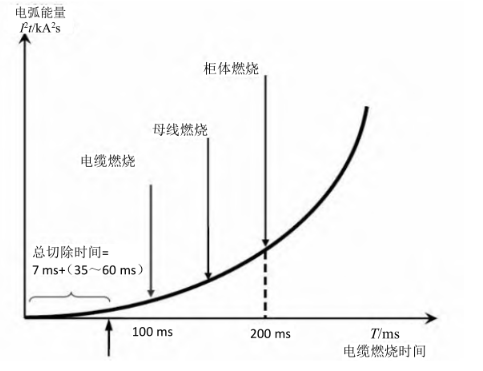
電弧光故障的危害程度取決于電弧光電流的大小及切除時間長短,電弧光產生的能量I2t與切除時間T成指數規律快速上升,如圖1所示。從圖1可以看出,電弧燃燒持續時間超過100ms,所釋放的能量開始急劇增加,接著各種故障效應會對開關設備的電纜、銅排等造成嚴重損壞,超過200ms,其能量已達到柜體燃燒級別,所以保護動作時間越快越好。要保證設備不受結構性損傷,必須盡量縮短切除時間,根據相關標準,純弧光跳閘時間小于10ms,帶電流雙重判據的動作時間小于20ms。
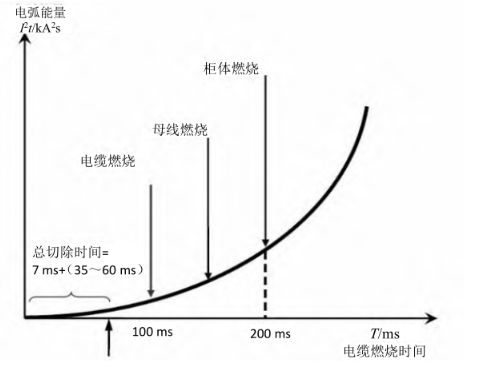
圖1電弧光的危害示意圖
3.弧光保護在風電中的應用
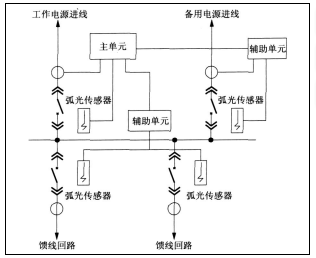
風力發電用電弧光保護裝置安裝在塔基控制柜內,主要由主控單元和弧光傳感器等幾部分組成,主控單元用于管理、控制整套電弧光保護系統,通過檢測弧光和電流增量信號,并對收到的單個信號或2種信號進行處理、判斷,弧光傳感器安裝在中壓開關柜及塔基變頻器內部。在滿足跳閘條件時,發出跳閘指令以切除故障。弧光傳感器先將檢測到的弧光信號傳輸給弧光采集單元,弧光采集單元再通過光纖信號反饋給主控單元。
3.1總體結構設計
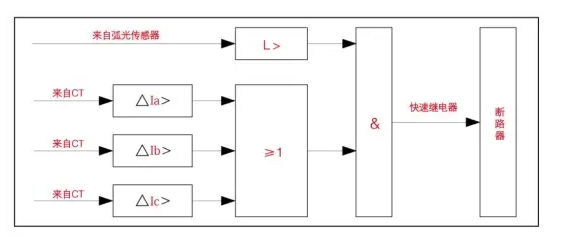
在風力發電機箱變高壓側、低壓側、變頻器內部分別單一布置弧光傳感器,稱之為單判據;若在布置弧光傳感器的同時,一并在變頻器內部布置測量電流的互感器,弧光裝置主控單元將接收到的弧光傳感器信號及電流的增量信號同時進行判斷,任意一相電流的增量以及弧光傳感器信號被觸發,則弧光主控單元向中壓開關柜發送切除指令,使風力發電機快速切除電網,這種方式稱之為雙判據。
3.2電流監測
采用電流互感器實現對變頻器內進線或出線電流的測量,電流互感器主要是用來將交流電路中的大電流轉換為一定比例的小電流(中國的國家標準為5A),以供測量和繼電保護之用;同時使測量、保護和控制裝置與高電壓隔離。在使用時,它的原線圈應與待測電流的負載線路相串聯,副邊線圈則與電阻接成閉合回路,工作原理同變壓器類似,但具體選型需要區分是為了用于測量還是為了用于保護。保護設備要根據被測線路特點選型,最后主要從電流比和容量考慮選擇合適的參數。風力發電機電流檢測裝置放置在中壓開關柜柜體進線電纜處,共安裝有3個電流互感器,分別測量A相、B相、C相電流,電流互感器將測量到的電流值傳送給弧光主控單元。
3.3主控單元功能設計
弧光裝置的主控單元除了完成弧光傳感器和電流互感器的信號邏輯處理之外,還應滿足以下功能:①具有自檢功能,包括裝置硬件故障、軟件故障、弧光傳感器異常等自檢,當裝置檢測到本身故障時,發出告警信號,同時閉鎖整套保護;②具備運行、裝置異常等狀態指示;③具有時間、定值、配置、采集量、動作等信息顯示,并有事件記錄、操作記錄查詢功能;④通訊功能,支持RS485、以太網,滿足MODBUS規約或IEC60870-5-103、104通訊規約等。
4風力發電機組的控制
4.1定槳距控制技術
定槳距控制技術要求在風力發電設備的輪轂上固定好葉片,如果葉片出現失速,便可以對功率的最大值進行控制,以實現風力發電質量控制的目的,而這便是定槳距風力發電機的工作原理。該項技術來自丹麥風力發電機組技術,運用的是槳葉翼型失速理論,能夠使氣流攻角在額定的風速上促使機械設備達到特定值,渦流便可以在槳葉表面出現,而且可降低效率,以實現限制功率的目的。定槳距控制技術已經被世界上諸多先進的制造商所使用,生產出很多大型的風電發電機組設備,在行業內的使用率高達70%。
4.2變槳距控制技術
變槳距控制技術所具備的變槳距風電機組調節功能,實現途徑是縱向軸心葉片的變化結果[6-8]。關于這一領域,可以對Vestas公司的風力機進行研究。該技術調節階段分為三個階段:(1)第一個階段是開機運行。變槳距風電機組的風力機如果正處于運行狀態,對于定槳葉節距角計算將逐漸展開,此時需要將節距角進行調整,如果已經達到了0.5倍額定轉速,則需要全面調整節距角,使其處于合適的角度位置,這樣才能夠使風力機處于可控的轉速狀態,完成并網發電功能。(2)進入到第二階段,此時風速低于額定風速,其功率輸出完全取決于槳葉的氣動性能。根據風速的大小,調整發電機轉差率,使其盡量運行在最佳葉尖速比,以優化功率輸出。(3)進入到第三階段,功率如果能夠與額定功率保持一致,系統將逐漸開始穩定的運行,這個時候要對輸出功率進行調節,如果輸出功率大于額定功率,則需要對槳葉節距角進行調整。一般而言,如果風力發電機組容量超過了750kW則可以使用變槳距調節技術,如果不足750kW,則可以使用定槳距失速調節技術。
5安科瑞ARB5系列弧光保護的原理及系統組成
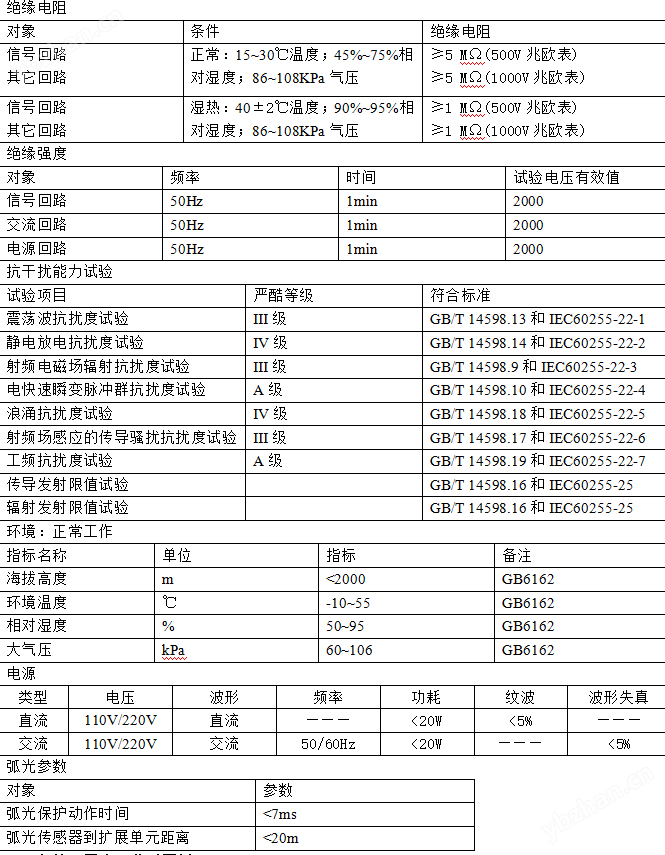
弧光保護裝置通過弧光+電流突變量雙重判據或弧光單判據啟動保護,其動作時間為
弧光單判據動作時間≤7ms;弧光+電流雙判據時間≤20ms。
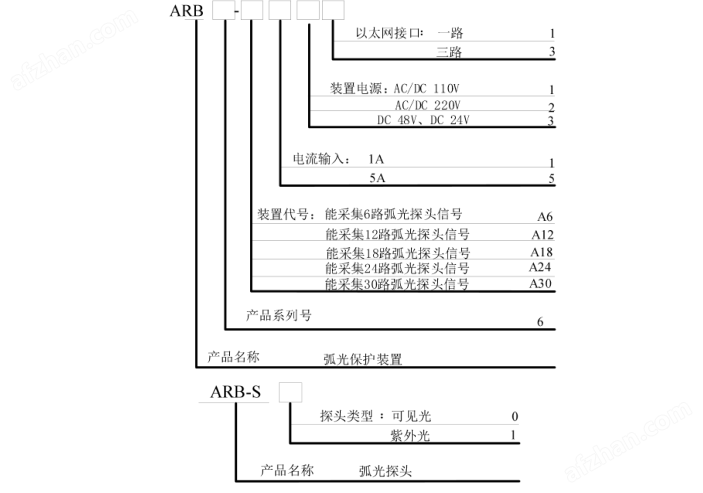
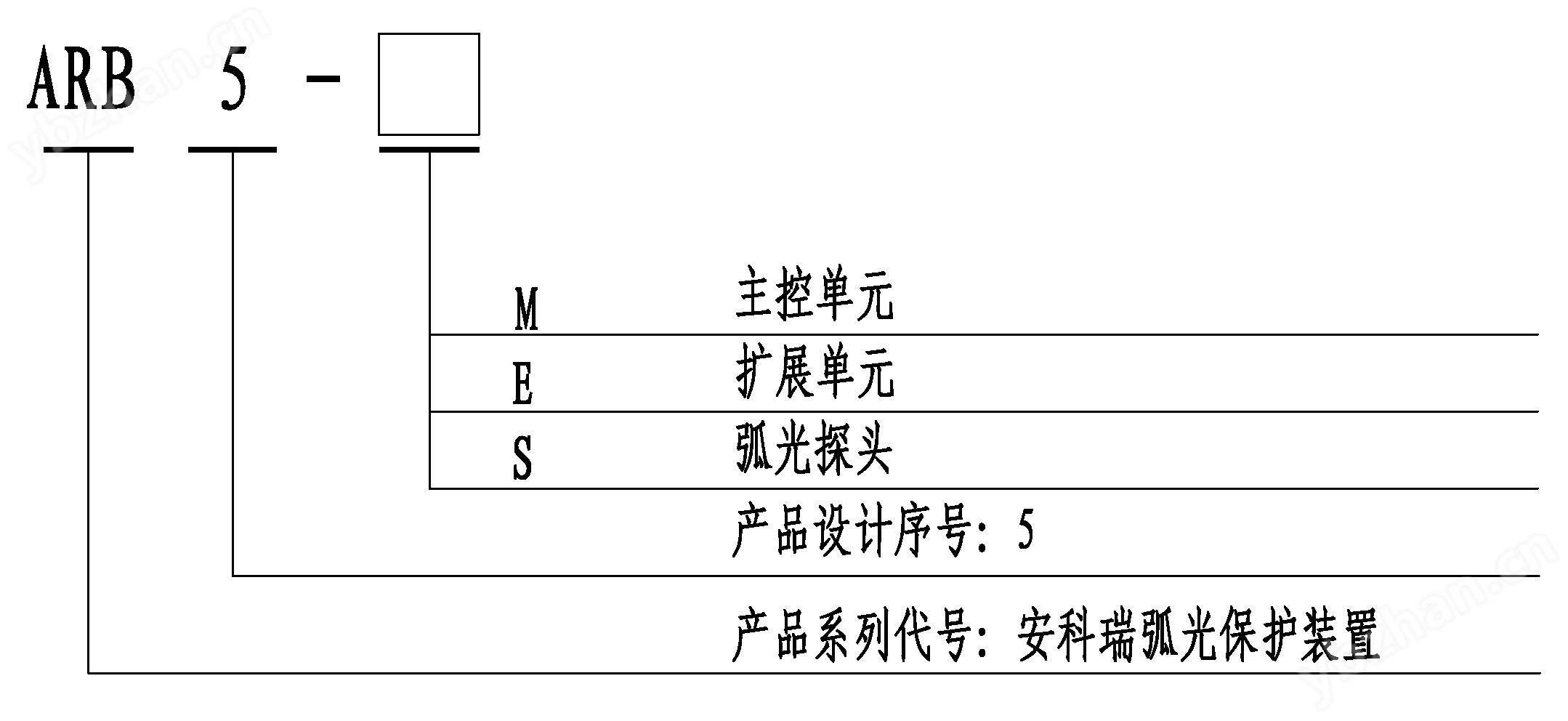
ARB5系列弧光保護裝置由ARB5-M主控單元、ARB5-E擴展單元、ARB5-S弧光探頭、弧光光纖以及尾纖等配件構成。
| 型號 | 主要功能 | 技術參數 |

|
ARB5-M弧光保護主控單元 |
8組弧光保護 |
可選配4塊采集板,1塊采集板可采集5路探頭,共支持20路弧光探頭直接采集。 亦可選配4塊主控板(即可接入4臺ARB5-E擴展單元)1塊主控板可接收6塊采集板的探頭,共支持120路弧光探頭采集。 |
| 4組失靈保護 | ||
| 4組電流回路TA監測 | ||
| 4組三相電流采集 | ||
| 11路可編程跳閘出口 | ||
| 非電量保護 | ||
| 裝置故障告警 | ||
| 2路RS485 | ||
| 2路以太網 | ||
| 1路打印接口 | ||
| 1路IRIG-B碼對時接口 | ||
| 支持IEC61850、modbusRTU、modbusTCP、IEC103 | ||
| 支持GOOSE輸入輸出(選配) | ||

|
ARB5-E弧光保護擴展單元 |
弧光信號采集 | 可選配6塊采集板,1塊采集板可采集5路探頭,共支持30路弧光探頭直接采集。 |
| 模擬狀態傳輸 | ||
| 需要配合ARB5-M主控單元使用 | ||

|
ARB5-S弧光探頭 |
弧光信號監測 | 點式弧光傳感器,可安裝于母線室、電纜室或斷路器室。 |
| 現場調試及工程服務費 | 視項目情況核價 |


7、結語
電弧光產品在風力發電機上的應用才剛剛起步,能夠較好地對風力發電機中的電弧光及過流現象進行及時告警和切斷斷路器保護,有效地避免了風力發電機起火等嚴重事故,后續可以結合氣溶膠等相關的消防系統產品,進行更加完善的保護。
參考文獻:
王海,電弧光保護在風力發電機中的應用研究
劉立忠,柴衛軍,鄭小翠.基于電子傳感技術的低壓開關柜弧光保護方法[J].自動化與儀表,2020,35(12):98-102.
[3]安科瑞企業微電網設計與應用手冊2020.06版.
[4]安科瑞用戶變電站變配電監控解決方案2021.10
審核編輯 黃宇
-
發電機
+關注
關注
26文章
1617瀏覽量
67534 -
風力發電
+關注
關注
6文章
238瀏覽量
32164 -
電弧光保護
+關注
關注
0文章
45瀏覽量
1929
發布評論請先 登錄
相關推薦
現代配電系統中電弧光保護裝置的應用

風力發電機有哪些類型?如何分類?
風力發電機由哪些結構組成?簡單分析
安科瑞ARB6充電堆場弧光保護裝置 電弧光故障監測 多路弧光探頭信號采集
安科瑞ARB5弧光保護裝置 可選配4塊采集板 ARB5-M
安科瑞ARB5弧光保護裝置 滅弧保護器 電弧光放電、線纜老化監測


火力發電廠用電高壓系統電弧光保護設備





 工商網監
工商網監
評論