") 傳感器的智能之路和實現(xiàn)之道(上)
傳感器的智能之路和實現(xiàn)之道(上)
????????
傳感器為什么需要智能?這是一個很好的問題!設(shè)想一下,MEMS傳感器可以測量如加速度、角速度、壓力、溫度和濕度等物理量并轉(zhuǎn)化為數(shù)字信號,但如果我們的傳感器只能簡單地采集和傳遞數(shù)據(jù),那它就像一個靜默的觀察者、被動的上報者,無法主動參與到系統(tǒng)中。
然而,當我們賦予傳感器智能時,在算法的加持下,它可以主動地在器件上基于所采集的數(shù)據(jù)進行融合、分類和預測,從而更加智能地應對各種情況,協(xié)助決策,優(yōu)化產(chǎn)品。
ST作為在MEMS傳感器和執(zhí)行器領(lǐng)域擁有豐富經(jīng)驗和成熟專業(yè)知識的公司,其傳感器產(chǎn)品是怎么一步步走向智能之路的呢?
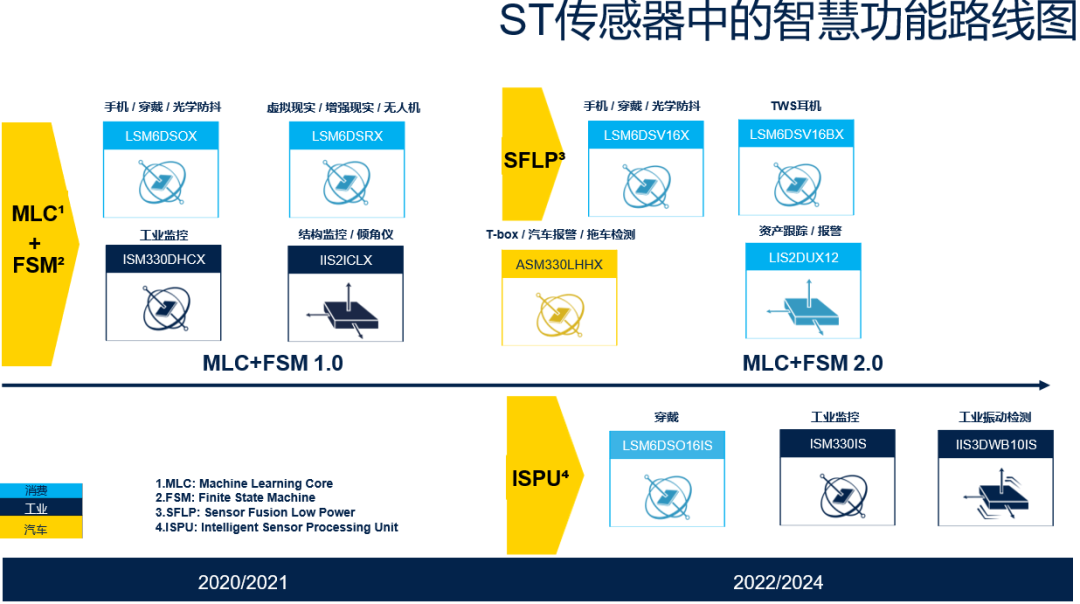
上圖是ST的傳感器智慧功能路線圖。最早我們推出基于MLC(Machine Learning Core,機器學習核心)跟FSM(Finite States Machine,有限狀態(tài)機)的1.0版本的智慧功能 — ST所有帶嵌入式MLC功能的MEMS產(chǎn)品,在產(chǎn)品編號末尾均帶有X標記,方便工程師進行識別。在消費級應用上,我們有LSM6DSOX — 針對手機穿戴設(shè)備光學防抖應用的器件;LSM6DSRX — 針對虛擬現(xiàn)實跟正常現(xiàn)實無人機應用的器件。工業(yè)級應用上我們有ISM330DHCX以及傾角儀IIS2ICLX。
ST MEMS傳感器內(nèi)置的機器學習核心(MLC)基于決策樹分類器,可以在傳感器中以極低的功耗執(zhí)行程序化決策樹,檢測運動數(shù)據(jù)的同時運行不同任務(wù)。具體的機器學習模型設(shè)計過程可以參考之前的推文《AI技術(shù)專題之二:機器學習模型設(shè)計過程和MEMS MLC》或《DT0139設(shè)計建議:決策樹生成》
MLC與FSM有什么差別?
MLC主要用于活動跟蹤,即在做一些周期性長時間的運動時,對活動場景進行檢測,例如檢測人是在走路、跑步、騎車還是乘車;FSM則主要針對短時間一次性動作的手勢或姿態(tài)識別。
MLC與FSM兩者的差異包括:
1)輸入數(shù)據(jù)源差異 — MLC的輸入數(shù)據(jù)源是非原始數(shù)據(jù),而是基于原始數(shù)據(jù)進行標記并計算的特征值。而FSM基于原始的加速度或陀螺儀的樣本數(shù)據(jù)。
2)邏輯方面的差異 — MLC基于機器學習決策樹的邏輯;而FSM基于閥值/計時器的事件觸發(fā)器的邏輯,進行判斷和比較。
3)輸出方面的差異 — MLC基于決策樹邏輯進行模式匹配,再輸出不同的分類結(jié)果;FSM則是基于命令和條件進行判斷,再輸出事件檢測的結(jié)果。
進入MLC和FSM 2.0階段后,以LSM6DSV16X/LSM6DSV16BX/LIS2DUX12為代表的器件引入2.0功能并集成了SFLP低功耗融合算法。
SFLP(Sensor Fusion Low Power)是6軸低功耗傳感器融合的縮寫。ST 6DSV系列IMU中均配置了SFLP功能。

其主要特點包括:
1)基于加速度及陀螺儀數(shù)據(jù)進行融合的算法,可以輸出游戲旋轉(zhuǎn)矢量,相當于表現(xiàn)在空間姿態(tài)的一個四元數(shù)。這個四元數(shù)也可通過一個算法轉(zhuǎn)換成歐拉角,展現(xiàn)成空間姿態(tài),即從A點移動到B點時,在空間中的運動軌跡。同時這個數(shù)據(jù)還可以保存在FIFO中。
2)可以輸出重力矢量,用來表示重力方向的三維向量。
3)可以提供陀螺儀的bias,相當于陀螺儀一個零偏支持靜態(tài)校準。同時也集成動態(tài)零偏校準算法,實時計算陀螺儀的零偏,減少積分誤差。
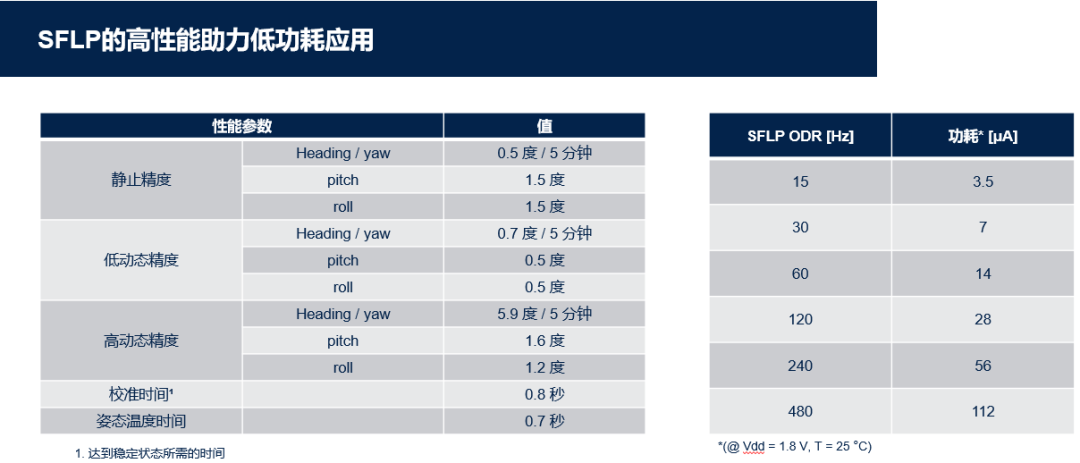
SFLP低功耗傳感器融合在消費電子領(lǐng)域有廣泛的應用場景;例如游戲手柄、賽車、AR/VR/MR的游戲裝備空間姿態(tài)檢測;在可穿戴領(lǐng)域,如手表中的運動實時檢測和手勢識別、耳機TWS的3D空間音效,即當用戶移動頭部時,音頻能夠跟隨頭部運動播放;在手機導航和無人機中,也可以使用SFLP進行3D空間姿態(tài)檢測。畢竟,SFLP具有卓越的性能 — 不僅可以輸出6軸游戲旋轉(zhuǎn)矢量,而且無論靜止精度、低動態(tài)精度還是高動態(tài)精度都非常高。校準時間即達到穩(wěn)定狀態(tài)所需要的校準時間僅為0.8秒,姿態(tài)穩(wěn)定時間為0.7秒。功耗方面,在15Hz下僅需3.5μA,120Hz時功耗也只有28μA。
為了方便開發(fā)者使用,我們在GitHub上提供了詳細的參考代碼。通過參考代碼,開發(fā)者可以了解如何實現(xiàn)軟件復位,配置加速度陀螺儀量程和ODR,配置FIFO buffer觸發(fā)中斷,設(shè)置SFLP數(shù)據(jù)保存到FIFO中,配置FIFO模式,設(shè)置FIFO為stream模式,使能sensor及SFLP算,設(shè)置Gbias,陀螺儀零偏動態(tài)獲取,提高算法的精準度等等細節(jié)。
基于專業(yè)的MEMS評估母板加上適用于各種工業(yè)級、消費級、汽車級傳感器的適配板,然后連接電腦,進入Unico-GUI功能界面,通過搜索選擇傳感器,點擊Fusion功能,然后您就可以看見下面視頻中的茶壺會跟隨板子的移動進行旋轉(zhuǎn)或者說空中姿態(tài)檢測。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50678瀏覽量
752001 -
算法
+關(guān)注
關(guān)注
23文章
4599瀏覽量
92643 -
機器學習
+關(guān)注
關(guān)注
66文章
8377瀏覽量
132407
原文標題:技術(shù)分享 | 傳感器的智能之路和實現(xiàn)之道(上)
文章出處:【微信號:comtech_inc,微信公眾號:Comtech科通】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于SOC/IP的智能傳感器設(shè)計研究
傳感器在智能電網(wǎng)中的應用
霍爾磁傳感器在智能水表上的應用
霍爾磁傳感器在智能水表上的應用
智能傳感器
傳感器組合實現(xiàn)更加智能的移動設(shè)備
智能溫度傳感器的優(yōu)勢何在?
智能傳感器的實現(xiàn)途徑
如何利用FPGA實現(xiàn)智能傳感器系統(tǒng)的設(shè)計
毫米波傳感器實現(xiàn)邊緣智能的方法
技術(shù)干貨 | 傳感器的智能之路和實現(xiàn)之道(上)

技術(shù)干貨 | 傳感器的智能之路和實現(xiàn)之道(下)

傳感器的智能之路和實現(xiàn)之道(下)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論