") CAN H與 CAN L短路故障排除
CAN H與 CAN L短路故障排除
CAN H與 CAN L短路
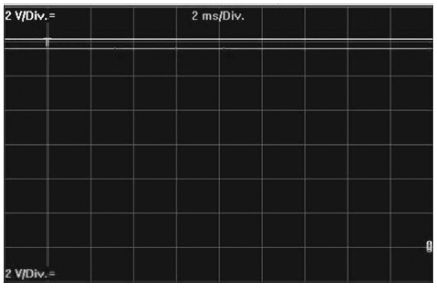
當(dāng)CAN H 與CAN L 短路時(shí),CAN網(wǎng)絡(luò)會(huì)關(guān)閉,無(wú)法再進(jìn)行通信。會(huì)有相應(yīng)的網(wǎng)絡(luò)故障碼。CAN H 與CAN L短路的總線波形如下圖所示。
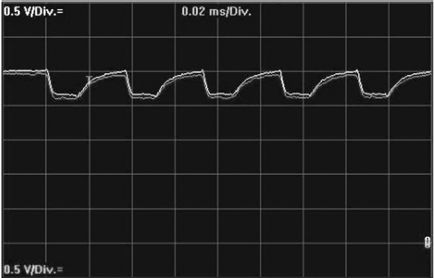
當(dāng)兩者相互短路之后,CAN電壓電位置于隱性電壓值(約2.5V)。實(shí)際測(cè)量?jī)蓷lCAN導(dǎo)線的電壓,會(huì)發(fā)現(xiàn)始終在2.5V左右,基本不變化。
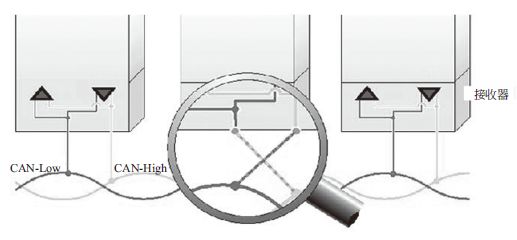
故障排除方法:通過(guò)插拔CAN總線上的控制模塊(節(jié)點(diǎn)),可以判斷是由節(jié)點(diǎn)引起的短路還是導(dǎo)線連接引起的短路。
逐個(gè)斷開(kāi)節(jié)點(diǎn),若電壓恢復(fù)正常,則說(shuō)明該節(jié)點(diǎn)有問(wèn)題。若斷開(kāi)所有節(jié)點(diǎn)后電壓還沒(méi)有變化,則說(shuō)明線路短路。
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
汽車電子
+關(guān)注
關(guān)注
3024文章
7869瀏覽量
166510 -
CAN
+關(guān)注
關(guān)注
57文章
2717瀏覽量
463377 -
電壓
+關(guān)注
關(guān)注
45文章
5562瀏覽量
115588 -
總線
+關(guān)注
關(guān)注
10文章
2867瀏覽量
87988
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
CAN總線一致性測(cè)試中的容錯(cuò)性測(cè)試介紹
CAN線短接到地線:將CANScope-StressZ的GND接口與Vdis-連接。如圖3分別測(cè)試CAN_H對(duì)地短路1分鐘、CAN_L對(duì)地短路
新能源汽車如何進(jìn)行CAN總線故障定位及干擾排除?
如何進(jìn)行 CAN 總線物理層的干擾定位呢?我們需要借助專業(yè)的干擾分析工具——頻譜分析,CANScope 是專業(yè)的 CAN 總線分析工具,其 FFT 分析功能可以對(duì) CAN_L、CAN_H
高速CAN總線和低速CAN總線區(qū)別分析
高速CAN總線上為顯性電平(邏輯0)時(shí),CAN_H為3.5V、CAN_L為1.5V,此時(shí)電壓差是2V,顯性狀態(tài)的CAN總線電壓范圍。
高速CAN
發(fā)表于 09-13 16:57
?4591次閱讀
CAN總線詳解
CAN總線網(wǎng)絡(luò)主要掛在CAN_H和CAN_L,各個(gè)節(jié)點(diǎn)通過(guò)這兩條線實(shí)現(xiàn)信號(hào)的串行差分傳輸,為了避免信號(hào)的反射和干擾,還需要在CAN_H和CAN_L
CAN通信針腳定義 can通信和串口通信區(qū)別在哪
CAN線上的兩根線分別是CAN_H和CAN_L,它們攜帶著差分信號(hào)。CAN_H線上的電壓值高于CAN_L線時(shí),表示傳輸?shù)氖歉唠娖叫盘?hào);
can總線是單線還是雙線 can總線通訊最少需要幾根線
CAN總線通常由兩根線組成:CAN-High(CAN-H)和CAN-Low(CAN-L),也稱為CAN-
發(fā)表于 09-12 14:59
?9243次閱讀
CAN H對(duì)電源(正極)短路故障如何解決
電壓電位被置于12V,CAN L 線的隱性電壓被置于大約12V。CAN H對(duì)電源短路的總線波形如下圖所示。 實(shí)際測(cè)量電壓,若
CAN L對(duì)地短路總線波形
當(dāng)出現(xiàn)CAN L 對(duì)地短路這種故障時(shí),根據(jù)CAN總線的容錯(cuò)特性,可能出現(xiàn)整個(gè)CAN網(wǎng)絡(luò)無(wú)法通信的
經(jīng)典的CAN總線現(xiàn)場(chǎng)故障
CAN H 電壓也被置于12V。CAN L 對(duì)電源短路的總線波形如下圖所示。 實(shí)際測(cè)量CAN導(dǎo)線
CAN L與CAN H導(dǎo)線相互反接
當(dāng)出現(xiàn)CAN L 與CAN H 導(dǎo)線互相接反這種故障時(shí),一般情況下,接錯(cuò)的那個(gè)控制模塊將無(wú)法通信,其他控制模塊的通信則正常。
CAN電氣特性屬性
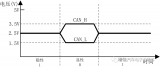
顯性電平表示邏輯“0”,此時(shí) CAN_H 電平比 CAN_L 高,分別為 3.5V 和 1.5V,電位差為2V。隱形電平表示邏輯“1”,此時(shí) CAN_H 和 CAN_L 電壓都為 2.
CAN H對(duì)地短路故障分析
CAN H 的電壓位于0V,CAN L 電壓也位于0V,可是在CAN L 導(dǎo)線上還能夠看到一小部

can總線的故障波形有哪些
CAN總線(Controller Area Network)是一種用于汽車和工業(yè)自動(dòng)化領(lǐng)域的通信協(xié)議。它具有高可靠性、實(shí)時(shí)性和靈活性的特點(diǎn)。然而,在使用過(guò)程中,CAN總線也可能出現(xiàn)一些故障。本文將





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論