 如何實現RTOS上的微秒級延時設計呢?
如何實現RTOS上的微秒級延時設計呢?
通常RTOS系統滴答為1KHz,當然,也有100Hz,或者10KHz的情況。
1KHz時,系統延時最短為1ms,在實時控制中有些情況需要微秒(us)級延時,這該怎么辦呢?
微秒級延時有兩種實現思路:
一、著情提高系統時鐘
一、著情提高系統時鐘
之所以說是“著情”提高的原因是:系統時鐘越快,單位時間內的線程調度次數越多,也就是說花在調度的時間會大幅增加,這對線程的功能不利。真正做事的是線程函數,如果 CPU 會說話,過快的線程調度將會引起 CPU 的極度不滿。線程是 CPU 具體要做的事,剛把 CPU 調過來做事,事沒做完就拉跑做另一件事,CPU 會說:“傻瓜,瘋了嗎?不是讓我做事的碼,干嘛老是拉著我跑這跑那,就不能讓我干完了再走碼?!”
二、使用 MCU 片上外設定時器
一般 MCU 都會有片上高精度定時器外設,可以配置到 1us 精度。即然用定時器可以,那就用定時器唄,還寫什么文章?當然不只是開啟定時器這么簡單,RTOS 要實現的是阻塞延時,任務進入延時要交出 CPU 使用權進入阻塞狀態。在 RTOS 上用定時器躺平死等是無賴行為,睡眠讓權才能實現良好的多線程調度。
雖然 us 級延時時間短,在一個線程處于延時中時另一個線程又要開始延時的情況發生概率不大。但是在多線程情況下延時依舊有可能發生重入,比如一個線程要延時 500us,剛過 100us 另一個線程就要延時 200us,這種情況不但發生了重入,還有“時間覆蓋”(200us 覆蓋了上一個線程剩余的 400us 里的時間段),這些情況也不是光靠一個硬件高精度定時器就能應對的。
多線程延時工況分析
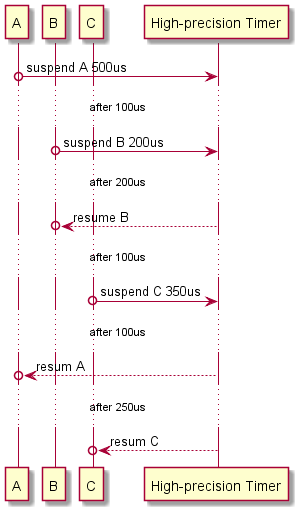
先來看一張多線程延時工況圖,如圖所示:
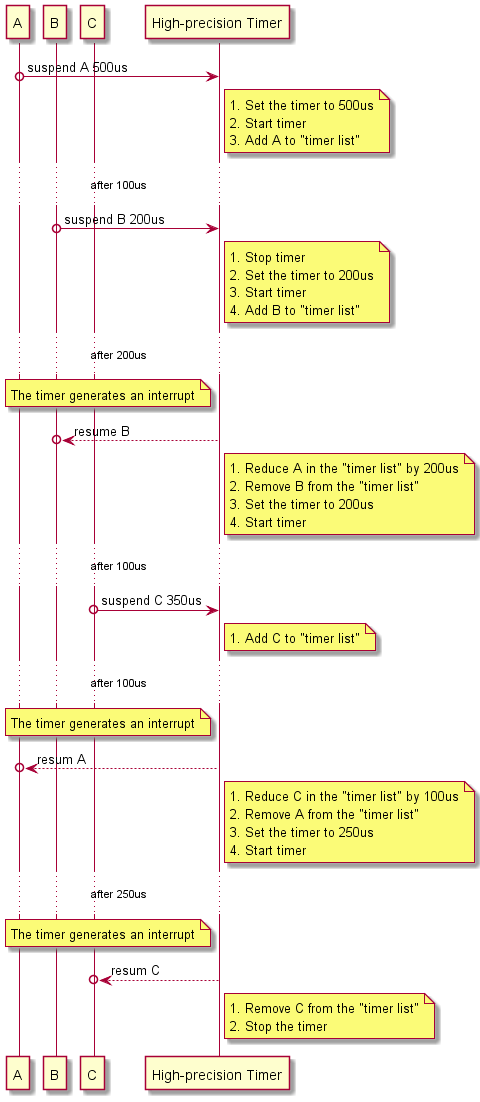
為了方便閱讀以及接下來進一步的設計實現,在上圖基礎上加了一些注釋,對多線程的工況進行更細致一點的描述,如圖所示:
為了更好說明,這里選用 Microsoft Azure RTOS ThreadX 做基礎來實現這個設計。目的在于輸出通用方法,具體選什么 RTOS 并不重要,是個多線程就行,比如:RT-Thread、FreeRTOS 等都可以。
圖中的 A、B、C 和 High-precision Timer 是 4 個線程。其中 High-precision Timer 線程優先級最高,但不是定時回調的,而是被動觸發。下面說說為什么 High-precision Timer 線程優先級要最高,以及如何被動觸發。
我們知道線程中用 WAIT_FOREVER 方式等待信號量的時候,若信號量的值為 0 則線程會被掛起在這個信號量下。我們就利用這個特點來完成線程的“被動觸發”,即:
1、信號量建立時初值為 0
2、在中斷中釋放一次信號量(即信號量值加 1)
這樣中斷發生后就能立刻喚醒掛起在該信號量下的線程,即完成了線程的被動觸發。線程轉為就緒態后,因其優先級最高,會立即搶占調度器得到執行。在 Hight-precision Timer 線程被信號量喚醒后,立即對延時時間到的線程進行 resume 操作,這樣就完成了線程的 us 延時。
我們回看一下上面圖中的 A、B、C 三個線程,每條線上都串了兩個圈圈,每條線從上往下第一個圈是延時主動掛起,第二個圈是時間到后被 High-precision Timer 線程 resume 回來繼續執行。
至此讀圖的方法基本說清楚了,如果要落實到代碼,其實還有個“硬件定時器與 High-precision Timer 線程”的關系。圖中標在 High-precision Timer 左邊的標簽是說:因為硬件定時器產生了中斷,才使得 High-precision Timer 線程對延時時間到的線程進行 resume。上面說“被動觸發”的時候有說到相關原理,其實上面圖的最右邊應該再放一列表示“硬件定時器”就更好理解原理了。沒有放的原因是這里要考慮“可重入”,這個瓜有點多,一車裝不下,裝少了說不完善,裝多了眼花繚亂,所以就沒畫“硬件定時器”這一列。
代碼實現
為了實現上述設計的阻塞延時,代碼要劃分為四個部分: 一、 要配置一個 us 級定時器; 二、 要做一個 us 延時的函數接口; 三、 要有一個 High-precision Timer 線程; 四、 要有一個測試用 us 級的普通定時回調線程。 下面以 STM32 為例逐一上代碼。
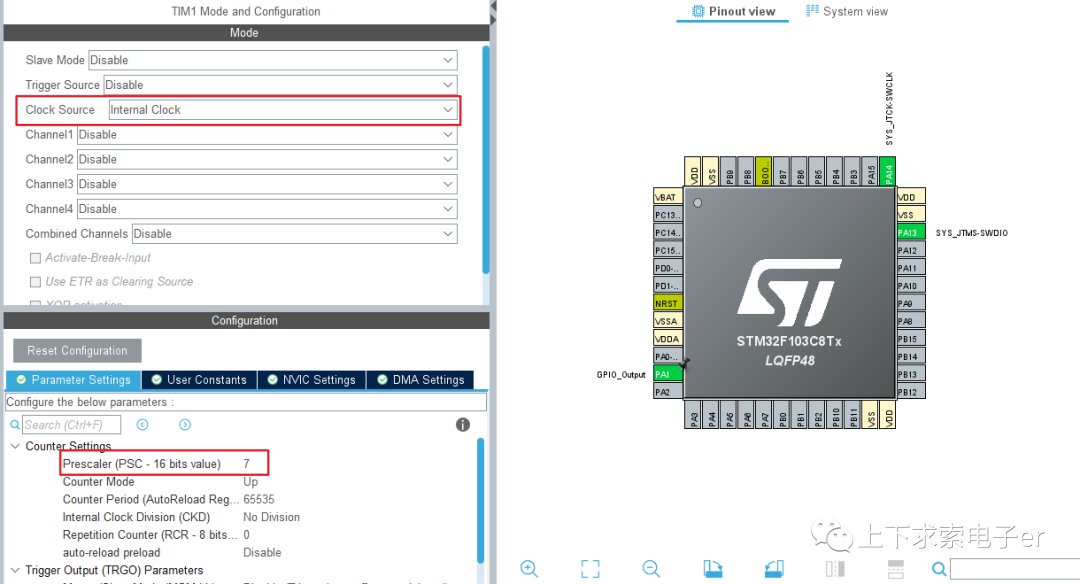
us 級定時器配置
1、 定時器初始化
這里直接使用 CubeMX 生成的函數最方便,一行不改,如下:
/** * @brief TIM9 Initialization Function * @param None * @retval None */ static void MX_TIM9_Init(void) { /* USER CODE BEGIN TIM9_Init 0 */ /* USER CODE END TIM9_Init 0 */ TIM_ClockConfigTypeDef sClockSourceConfig = {0}; /* USER CODE BEGIN TIM9_Init 1 */ /* USER CODE END TIM9_Init 1 */ htim9.Instance = TIM9; htim9.Init.Prescaler = 215; htim9.Init.CounterMode = TIM_COUNTERMODE_UP; htim9.Init.Period = 65535; htim9.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim9.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim9) != HAL_OK) { Error_Handler(); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim9, &sClockSourceConfig) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN TIM9_Init 2 */ /* USER CODE END TIM9_Init 2 */ }
由于我們要使用定時器的定時中斷,所以要對 NVIC 設置一下,這部分代碼 CubeMX 生成在另一個文件下,為了調用方便將之與上面的初始化函數合至一處,如下:
void bsp_InitHardTimer(void)
{
__HAL_RCC_TIM9_CLK_ENABLE();
HAL_NVIC_SetPriority(TIM1_BRK_TIM9_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM1_BRK_TIM9_IRQn);
MX_TIM9_Init();
}
注意,這里調到初始化函數就完了,不要開啟定時器,按照設計定時器是需要延時的線程在調用延時函數時才打開的。
2、 打開定時器的函數
void bsp_DelayUS(uint32_t n)
{
n = (n<=30) ? n : (n-30);
HAL_TIM_Base_Stop_IT(&htim9);
htim9.Instance->CNT = htim9.Init.Period - n;
HAL_TIM_Base_Start_IT(&htim9);
}
這里注意是“先關閉再打開”,上面提到了“時間覆蓋”的情況下做延時,就必須先關閉正在延時中的定時器。
3、 定時器中斷函數
/**
* @brief This function handles TIM1 break interrupt and TIM9 global interrupt.
*/
void TIM1_BRK_TIM9_IRQHandler(void)
{
/* USER CODE BEGIN TIM1_BRK_TIM9_IRQn 0 */
/* USER CODE END TIM1_BRK_TIM9_IRQn 0 */
HAL_TIM_IRQHandler(&htim9);
/* USER CODE BEGIN TIM1_BRK_TIM9_IRQn 1 */
tx_semaphore_put(&tx_semaphore_delay_us);
HAL_TIM_Base_Stop_IT(&htim9);
/* USER CODE END TIM1_BRK_TIM9_IRQn 1 */
}
這里調用了 Microsoft Azure RTOS ThreadX 釋放信號量的 API tx_semaphore_put(),信號量在初始化時建立(省略了建立信號量的代碼)。
us 延時的函數接口
TX_THREAD *thread_delay_us;
UINT tx_thread_sleep_us(ULONG timer_ticks)
{
TX_THREAD_GET_CURRENT(thread_delay_us)
bsp_DelayUS(timer_ticks);
tx_thread_suspend(thread_delay_us);
return TX_SUCCESS;
}
這里定義了一個全局變量 thread_delay_us,用 TX_THREAD_GET_CURRENT() 獲取調用 us 延時的線程,在打開定時器后將線程通過 tx_thread_suspend() 掛起。
High-precision Timer 線程
extern TX_THREAD* thread_delay_us;
UINT status;
void threadx_task_delay_us_run(ULONG thread_input)
{
(void)thread_input;
while(1){
tx_semaphore_get(&tx_semaphore_delay_us, TX_WAIT_FOREVER);
if(thread_delay_us){
status = tx_thread_resume(thread_delay_us);
}
}
}
這里同樣省略了線程的建立過程,給出了線程主體:與信號量 tx_semaphore_delay_us 一起完成線程的被動觸發,以及對 thread_delay_us 線程的 resume。
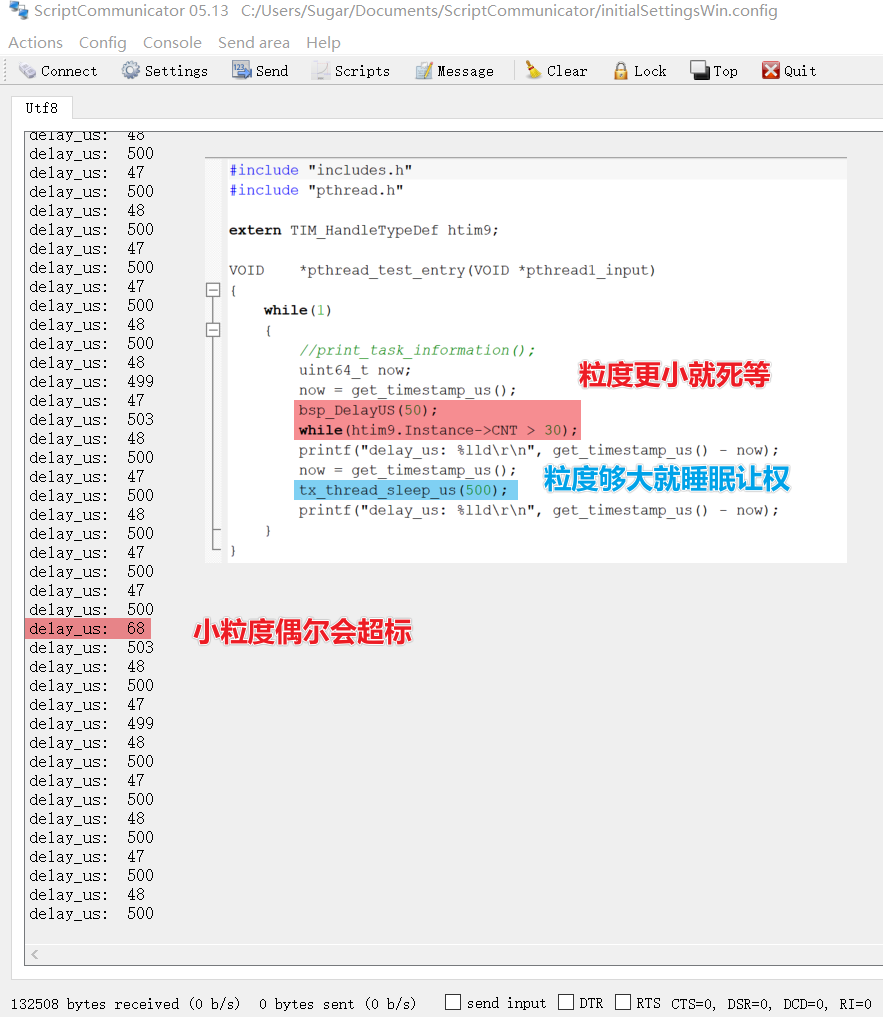
測試用 us 級的普通定時回調線程
#include "pthread.h"
VOID *pthread_test_entry(VOID *pthread1_input)
{
while(1)
{
//print_task_information();
uint64_t now = get_timestamp_us();
tx_thread_sleep_us(100);
printf("delay_us: %lld
", get_timestamp_us() - now);
}
}
這是以 posix 接口 API 建立的線程,對 posix 有興趣的可以看下文章《Azure RTOS ThreadX 的 posix 接口》。
時間粒度測試
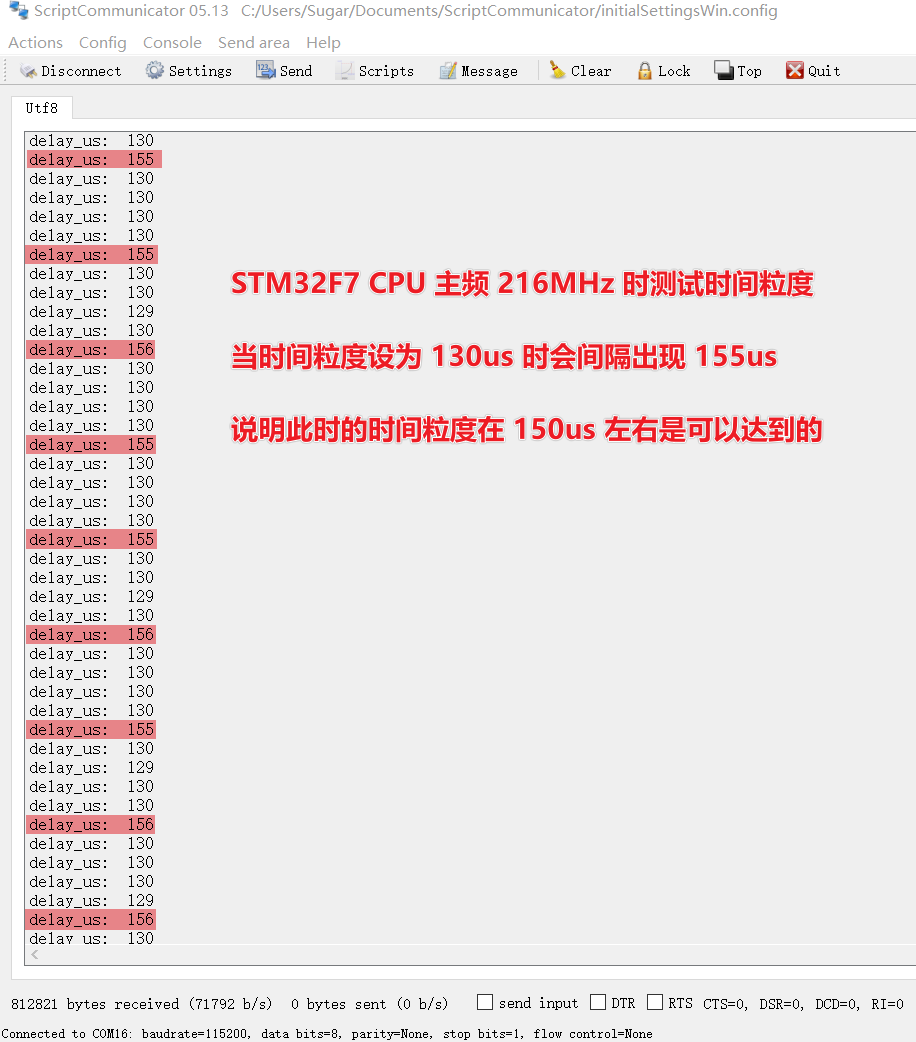
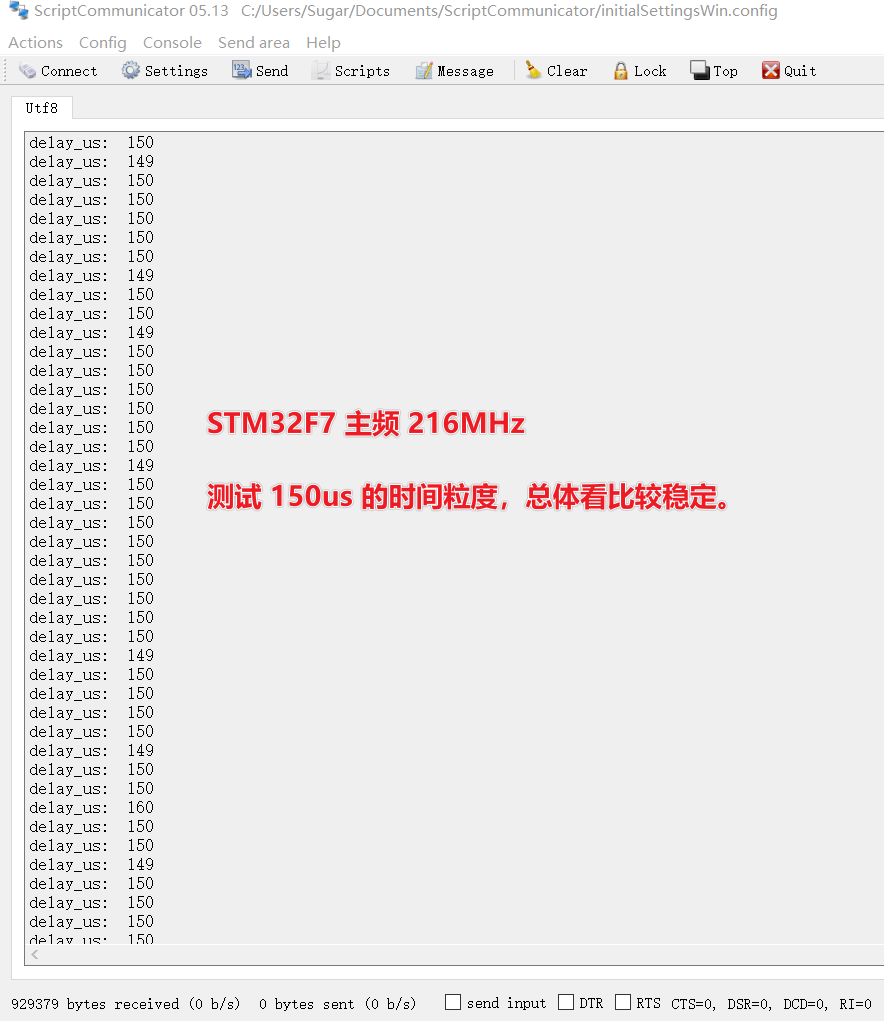
ThreadX 據說可以在 200MHz 的 MCU 上達到亞微秒級的上下文切換,Sugar 測試的時間粒度在 150us 時比較穩定。這并不是說 ThreadX 性能不好,而是 STM32F7 定時器一開加一關大約就要 30us,所以定時精度比 30us 更小時不要開關定時器,但這次我們的設計為了應對可能發生的重入情況,必須有定時器的開關才行。
怎么知道一開加一關要 30us 的,原因如圖:
審核編輯:劉清
-
STM32
+關注
關注
2266文章
10873瀏覽量
354832 -
定時器
+關注
關注
23文章
3240瀏覽量
114477 -
觸發器
+關注
關注
14文章
1996瀏覽量
61052 -
RTOS
+關注
關注
21文章
809瀏覽量
119437 -
定時器中斷
+關注
關注
0文章
49瀏覽量
11165
原文標題:RTOS 上微秒級延時方案
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32基于HAL庫實現微秒延時
請問怎么在ucosII中實現微秒級的延時?
如何用SysTick系統定時器寫一個微秒級延時函數呢
HAL庫微秒級的延時實現
用C語言實現,精確微秒級的延時資料下載

單片機 毫秒&微秒 級延時
通用定時器實現STM32單片機微秒級延時函數





 工商網監
工商網監
評論