") 虹科Safran助力dSPACE實(shí)現(xiàn)基于GNSS駕駛功能的HIL仿真
虹科Safran助力dSPACE實(shí)現(xiàn)基于GNSS駕駛功能的HIL仿真
概述
世界知名的模擬與驗(yàn)證方案廠商dSPACE借助虹科Safran GNSS模擬器實(shí)現(xiàn)了一套基于GNSS的駕駛功能HIL仿真系統(tǒng),該系統(tǒng)可以用于自動(dòng)駕駛、車聯(lián)網(wǎng)、智能座艙等各類汽車行業(yè)應(yīng)用,并具備極大的靈活性與多功能,適用于各類復(fù)雜場(chǎng)景測(cè)試。
HK
關(guān)于dSPACE
dSPACE是一個(gè)在模擬和驗(yàn)證領(lǐng)域有著全球影響力的公司,也是航空航天和國(guó)防領(lǐng)域的創(chuàng)新領(lǐng)導(dǎo)者。dSPACE提供了一系列的模擬和驗(yàn)證解決方案,涵蓋了從初始想法到支持系列生產(chǎn)的整個(gè)創(chuàng)新鏈。dSPACE的模擬和驗(yàn)證解決方案可以應(yīng)用于自動(dòng)駕駛、電動(dòng)汽車、電機(jī)、電池系統(tǒng)、燃料電池、功率電子元件、充電基礎(chǔ)設(shè)施等領(lǐng)域。dSPACE還提供了不同類型的模擬模型,支持從功能設(shè)計(jì)到ECU測(cè)試的所有開發(fā)階段。
HK
關(guān)于Safran
賽峰集團(tuán)(Safran)是一家國(guó)際高科技集團(tuán)公司,業(yè)務(wù)范圍涵蓋航空(推進(jìn)、設(shè)備和內(nèi)裝)、防務(wù)和航天領(lǐng)域。賽峰集團(tuán)設(shè)計(jì)、打造和支持高科技解決方案,致力于構(gòu)建更安全且可持續(xù)發(fā)展的世界。同時(shí),賽峰集團(tuán)還運(yùn)用技術(shù)專長(zhǎng)開發(fā)解決方案,滿足防務(wù)及汽車電子等戰(zhàn)略需求。
方案介紹
GNSS信號(hào)對(duì)于自動(dòng)駕駛的重要性在于它可以提供精確、可用和可靠的定位解決方案,無(wú)論是V2X通信還是自動(dòng)駕駛功能測(cè)試等許多應(yīng)用都需要衛(wèi)星支持的車輛位置檢測(cè)能力。
但是不同GNSS系統(tǒng)的可用性各不相同,并且全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號(hào)的質(zhì)量容易受到各類地形影響(如峽谷,密集城市,立交橋),此外信號(hào)可能受到無(wú)意干擾、故意干擾或惡意欺騙的影響。為了確保各種測(cè)試場(chǎng)景中應(yīng)用程序日常使用的穩(wěn)健性和適用性,需要借助更為穩(wěn)定且性能優(yōu)秀的GNSS模擬器。
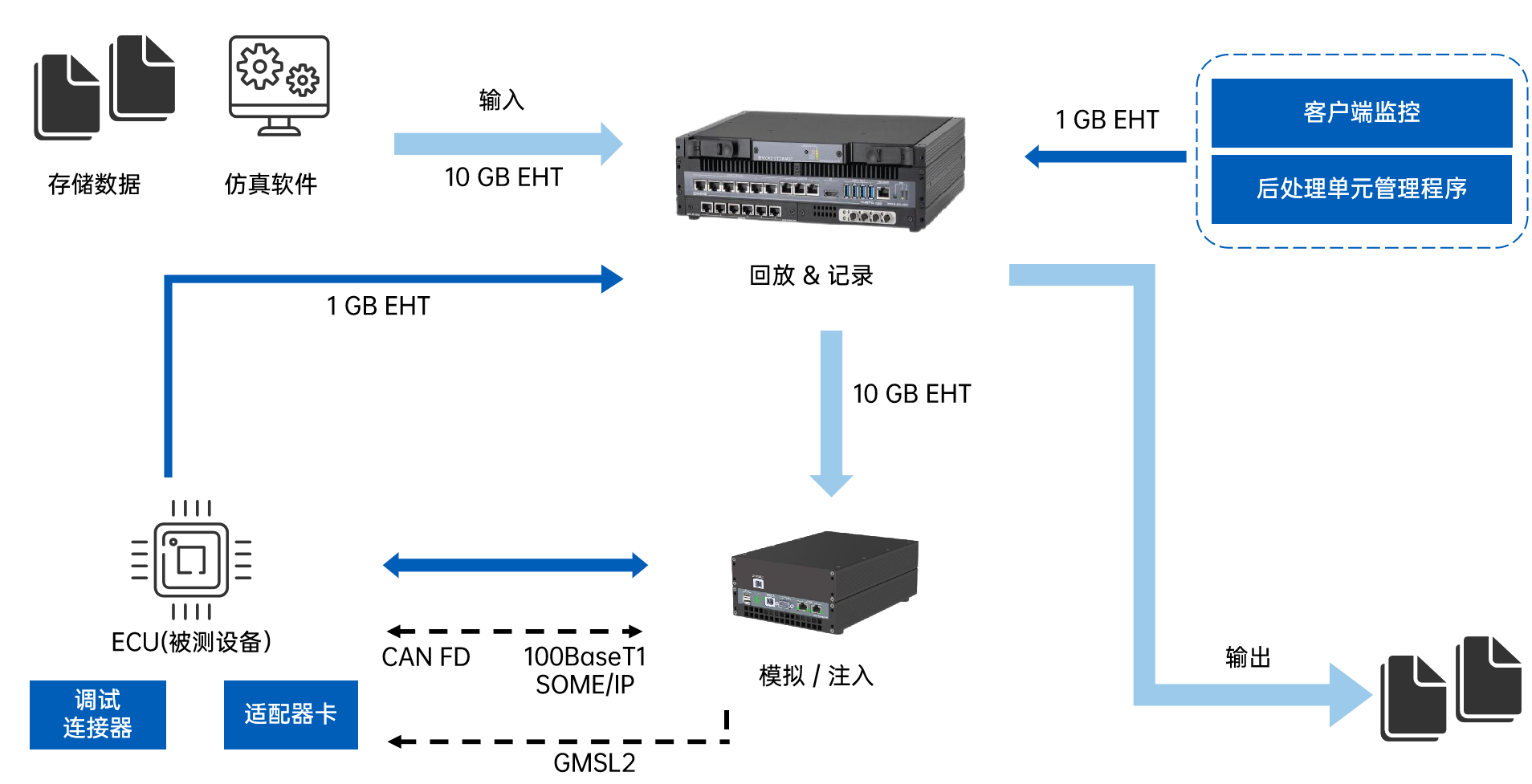
整個(gè)系統(tǒng)由以下部分組成:
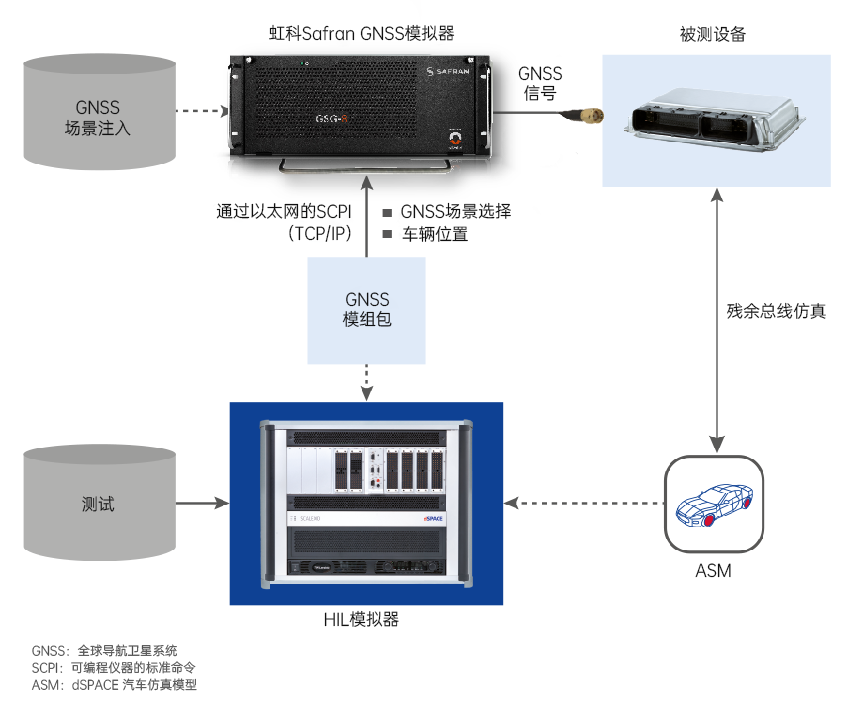
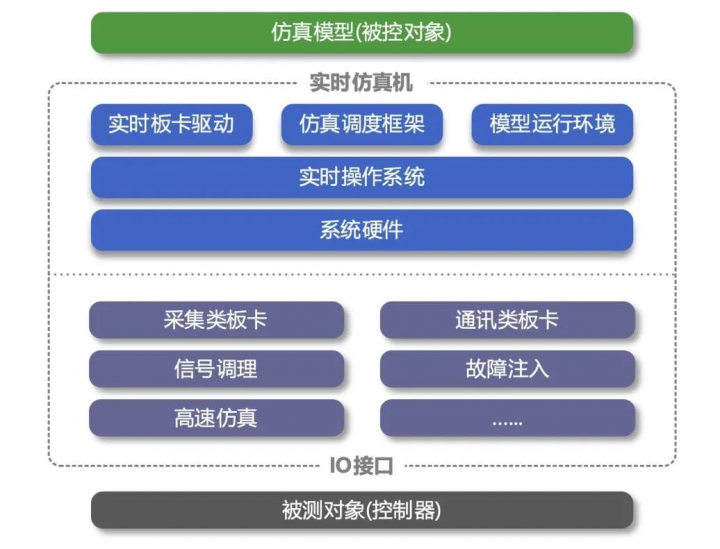
HIL模擬器
具有汽車仿真模型(ASM)的HIL系統(tǒng),用于模擬車輛和交通。
GNSS blockset
用于控制全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號(hào)發(fā)生器的專用 GNSS 模擬器接口模塊組
虹科Safran GNSS模擬器GSG-8
根據(jù)當(dāng)前提供的地理位置等信息生成具有特定要求的GNSS場(chǎng)景,并以射頻信號(hào)的形式提供車輛位置數(shù)據(jù)
汽車仿真模型(ASM)
ASM是一個(gè)用于模擬內(nèi)燃機(jī)、車輛動(dòng)力學(xué)、電氣元件和交通環(huán)境的工具套件。開放式Simulink模型用于基于模型的功能開發(fā)以及硬件在環(huán)(HIL)模擬器上的ECU測(cè)試
為什么選擇虹科Safran GNSS模擬器?

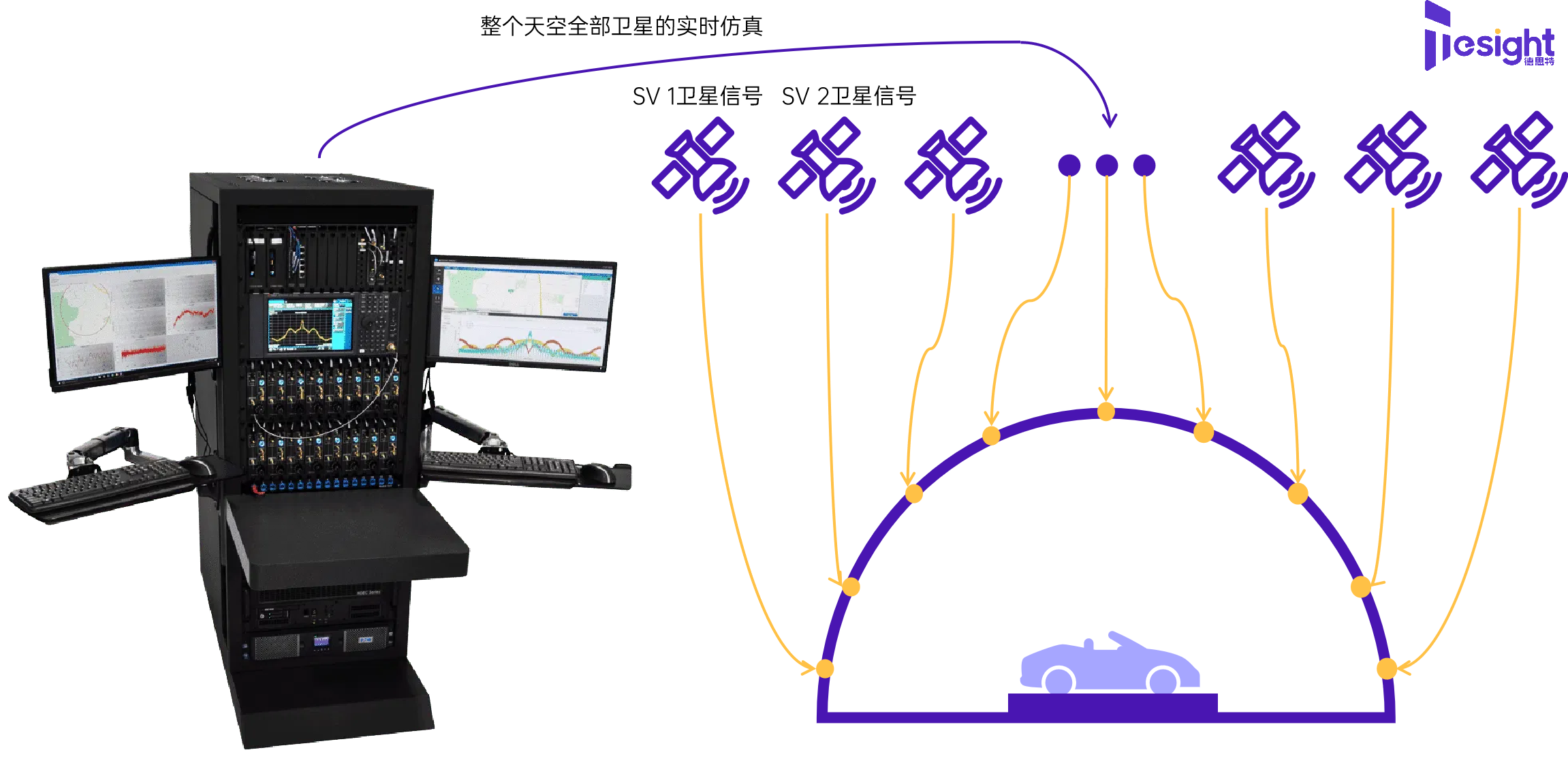
虹科Safran GNSS模擬器基于先進(jìn)的軟件定義架構(gòu),賦能下一代定位、導(dǎo)航與授時(shí)測(cè)試,具有靈活的軟件定義平臺(tái)和API,支持所有的GNSS星座與波形。具有超高的精度、分辨率以及動(dòng)態(tài)性能,仿真迭代率可達(dá)1000Hz,強(qiáng)大的軟件定義實(shí)現(xiàn)通道數(shù)無(wú)限制。廣泛應(yīng)用于汽車HIL測(cè)試,導(dǎo)航芯片、消費(fèi)電子、終端測(cè)試,航空航天模擬,以及干擾抵抗抗測(cè)試等領(lǐng)域。
●仿真迭代率高達(dá)1000Hz
●HIL仿真延遲低至5ms
●支持1000個(gè)搜星通道同時(shí)仿真,且無(wú)需額外付費(fèi)
●支持基于實(shí)時(shí)天空同步的全景衛(wèi)星模擬
HK
成效
借助虹科Safran GNSS模擬器,可以完成高性能的地理位置與衛(wèi)星信號(hào)的模擬,將GNSS信號(hào)發(fā)生器集成到仿真環(huán)境中并連接到dSPACE汽車仿真模型(ASM)后,模塊組就會(huì)選擇預(yù)定義的GNSS場(chǎng)景并控制信號(hào)發(fā)生器。在典型的測(cè)試中,起始位置、日期、路線、車輛的駕駛操作等首先在ASM模型中進(jìn)行參數(shù)化,然后選擇所需的GNSS場(chǎng)景,例如特定的衛(wèi)星星座(GPS、伽利略、格洛納斯、北斗等)和信號(hào)衰減,在執(zhí)行測(cè)試時(shí),HIL模擬器不斷將車輛的位置數(shù)據(jù)發(fā)送到信號(hào)發(fā)生器,信號(hào)發(fā)生器根據(jù)GNSS場(chǎng)景進(jìn)行準(zhǔn)備,并將其作為真實(shí)的射頻信號(hào)提供給待測(cè)設(shè)備。
-
仿真
+關(guān)注
關(guān)注
50文章
3972瀏覽量
132972 -
模擬器
+關(guān)注
關(guān)注
2文章
856瀏覽量
42979 -
GNSS
+關(guān)注
關(guān)注
9文章
726瀏覽量
47646 -
虹科電子
+關(guān)注
關(guān)注
0文章
572瀏覽量
14135
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Skydel GNSS模擬器引擎發(fā)布兩大全新功能
【干貨分享】硬件在環(huán)仿真(HiL)測(cè)試

Skydel基于NI USRP實(shí)現(xiàn)軟件定義GNSS信號(hào)仿真 #GNSS #GPS #NI #GNSS仿真
虹科方案 領(lǐng)航智能交通革新:虹科PEAK智行定位車控系統(tǒng)Demo版亮相


GNSS仿真引擎Skydel軟件使用培訓(xùn)課程-先導(dǎo)課 #GNSS模擬 #GNSS仿真 #gnss
在時(shí)間同步應(yīng)用上節(jié)省大量時(shí)間!德思特GNSS模擬器是怎么做到的?
虹科新品 | E-Val Pro Plus有線驗(yàn)證解決方案

康謀方案 | 基于場(chǎng)景的端到端硬件在環(huán)(HiL)測(cè)試智能解決方案
詳解快速控制原型RCP與硬件在環(huán)仿真HIL

芯驛電子AUMO仿真測(cè)試HIL助力自動(dòng)駕駛行業(yè)發(fā)展
2023年中國(guó)半實(shí)物仿真模擬(HiL)行業(yè)洞察報(bào)告
虹科案例 | 溫控?zé)o憂!虹科Comet創(chuàng)新產(chǎn)品助力va-Q-tec實(shí)現(xiàn)溫度敏感產(chǎn)品運(yùn)輸過程質(zhì)量控制溫控?zé)o憂!

德思特案例 | Skydel GNSS仿真引擎助力多所高校實(shí)現(xiàn)GNSS仿真測(cè)試教育

Skydel GNSS仿真引擎助力多所高校實(shí)現(xiàn)GNSS仿真測(cè)試教育





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論