") 單片機(jī)開發(fā)中,傳感器的數(shù)據(jù)處理算法
單片機(jī)開發(fā)中,傳感器的數(shù)據(jù)處理算法
在傳感器使用中,我們常常需要對傳感器數(shù)據(jù)進(jìn)行各種整理,讓應(yīng)用獲得更好的效果,以下介紹幾種常用的簡單處理方法:
加權(quán)平滑:平滑和均衡傳感器數(shù)據(jù),減小偶然數(shù)據(jù)突變的影響。
抽取突變:去除靜態(tài)和緩慢變化的數(shù)據(jù)背景,強(qiáng)調(diào)瞬間變化。
簡單移動平均線:保留數(shù)據(jù)流最近的K個(gè)數(shù)據(jù),取平均值。
下面,具體介紹一下這3種處理方法。
1、加權(quán)平滑
使用算法如下:
(新值) = (舊值)*(1 - a) + X * a其中a為設(shè)置的權(quán)值,X為最新數(shù)據(jù),程序?qū)崿F(xiàn)如下:
float ALPHA = 0.1f; public void onSensorChanged(SensorEvent event){ x = event.values[0]; y = event.values[1]; z = event.values[2]; mLowPassX = lowPass(x,mLowPassX); mLowPassY = lowPass(x,mLowPassY); mLowPassZ = lowPass(x,mLowPassZ); } private float lowPass(float current,float last){ return last * (1.0f - ALPHA) + current * ALPHA; }
2、抽取突變
此算法采用上面加權(quán)平滑的逆算法,實(shí)現(xiàn)代碼如下:
public void onSensorChanged(SensorEvent event){
final float ALPHA = 0.8;gravity[0] = ALPHA * gravity[0] + (1-ALPHA) * event.values[0];
gravity[1] = ALPHA * gravity[1] + (1-ALPHA) * event.values[1];
gravity[2] = ALPHA * gravity[2] + (1-ALPHA) * event.values[2];filteredValues[0] = event.values[0] - gravity[0];
filteredValues[1] = event.values[1] - gravity[1];
filteredValues[2] = event.values[2] - gravity[2];
}
3、簡單移動平均線
這個(gè)算法,保留傳感器數(shù)據(jù)流中最近的K個(gè)數(shù)據(jù),返回它們的平均值。k表示平均“窗口”的大小,實(shí)現(xiàn)代碼如下:
public class MovingAverage{
private float circularBuffer[]; //保存?zhèn)鞲衅髯罱腒個(gè)數(shù)據(jù)
private float avg; //返回到傳感器平均值
private float sum; //數(shù)值中傳感器數(shù)據(jù)的和
private float circularIndex; //傳感器數(shù)據(jù)數(shù)組節(jié)點(diǎn)位置
private int count;public MovingAverage(int k){
circularBuffer = new float[k];
count= 0;
circularIndex = 0;
avg = 0;
sum = 0;
}
public float getValue(){
return arg;
}
public long getCount(){
return count;
}
private void primeBuffer(float val){
for(int i=0;i= circularBuffer.length){
return 0;
}
return curIndex + 1;
}
public void pushValue(float x){
if(0 == count++){
primeBuffer(x);
}
float lastValue = circularBuffer[circularIndex];
circularBuffer[circularIndex] = x; //更新窗口中傳感器數(shù)據(jù)
sum -= lastValue; //更新窗口中傳感器數(shù)據(jù)和
sum += x;
avg = sum / circularBuffer.length; //計(jì)算得傳感器平均值
circularIndex = nextIndex(circularIndex);
}
};++i){>
來源:STM32嵌入式開發(fā)
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進(jìn)行處理
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2548文章
50671瀏覽量
751982 -
單片機(jī)
+關(guān)注
關(guān)注
6032文章
44514瀏覽量
632981 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
581瀏覽量
28529
發(fā)布評論請先 登錄
相關(guān)推薦
4~20mA傳感器數(shù)據(jù)處理新途徑
控制的許多應(yīng)用場合,都要使用傳感器來將單片機(jī)不能直接測量的信號換成單片機(jī)可以處理的電模擬信號,如壓力傳感器,溫度
發(fā)表于 12-16 10:31
電子稱重顯示器的數(shù)據(jù)處理方法
顯示器為例,介紹在電子秤中利用MCS-51系列單片機(jī)進(jìn)行數(shù)據(jù)處理的方法.更多詳情:http://www.nxhydt.com/soft/31/2011/2011041919544
發(fā)表于 11-17 16:58
如何去使用數(shù)字信號處理算法
文章背景一直想學(xué)習(xí)一下數(shù)字信號處理算法,而不是每次遇到數(shù)據(jù)處理就求平均,求最值,看容差,做滑動窗。。。數(shù)字信號處理算法已經(jīng)很成熟了,但網(wǎng)上大部分還是用matlab跑仿真,設(shè)計(jì)幾個(gè)不同頻率的sin信號
發(fā)表于 08-09 08:23
FCS中的智能傳感器的數(shù)據(jù)處理方法
FCS 是工業(yè)過程控制系統(tǒng)的必然趨勢,就系統(tǒng)中的智能傳感器進(jìn)行結(jié)構(gòu)分析,并根據(jù)其特點(diǎn),論述并分析了其數(shù)據(jù)處理方法的特性,并提出了一些具有先進(jìn)性的數(shù)據(jù)處理方法,對
發(fā)表于 07-09 13:55
?18次下載
基于單片機(jī)的氣敏傳感器測試系統(tǒng)
本文介紹一種新型的氣敏傳感器測試系統(tǒng)的設(shè)計(jì)方法。該系統(tǒng)基于具有語音處理功能的凌陽SPCE061A單片機(jī),能同時(shí)進(jìn)行多路傳感器測試、過程控制,及用虛擬儀器完成
發(fā)表于 05-13 16:39
?145次下載
智能儀器的數(shù)據(jù)處理算法
測量精度和可靠性是儀器的重要指標(biāo),引入數(shù)據(jù)處理算法后,使許多原來靠硬件電路難以實(shí)現(xiàn)的信號處理問題得以解決,從而克服和彌補(bǔ)了包括傳感器在內(nèi)的各個(gè)測量環(huán)節(jié)中硬件本身的
發(fā)表于 12-01 16:06
?93次下載

基于部分存儲和選擇性加載的數(shù)據(jù)處理算法
根據(jù)電能質(zhì)量系統(tǒng)中監(jiān)測數(shù)據(jù)海量化的趨勢,提出了一種基于部分存儲和選擇性加載的數(shù)據(jù)處理算法,徹底解決了現(xiàn)有數(shù)據(jù)處理算法中重復(fù)排序和多余
發(fā)表于 12-19 18:50
?0次下載
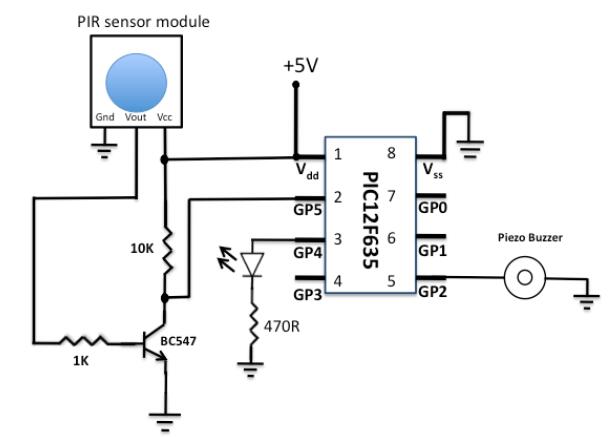
使用PIC單片機(jī)開發(fā)的被動紅外傳感器模塊的報(bào)警器
在本文中,單片機(jī)開發(fā)工程師們分享了一個(gè)使用PIC單片機(jī)開發(fā)的被動紅外(PIR)傳感器模塊的報(bào)警器
發(fā)表于 06-29 10:30
?2736次閱讀
淺析單片機(jī)開發(fā)中傳感器的數(shù)據(jù)處理算法
在傳感器使用中,我們常常需要對傳感器數(shù)據(jù)進(jìn)行各種整理,讓應(yīng)用獲得更好的效果,以下介紹幾種常用的簡單處理方法: 加權(quán)平滑:平滑和均衡
紅外雨量計(jì)(光學(xué)雨量傳感器)不同雨量場景如何優(yōu)化數(shù)據(jù)處理算法
紅外雨量計(jì)(光學(xué)雨量傳感器)不同雨量場景如何優(yōu)化數(shù)據(jù)處理算法 紅外雨量計(jì)是一種常用于雨量觀測和監(jiān)測的儀器。它通過感測雨滴落入雨斗的時(shí)間和數(shù)量,來計(jì)算出雨量數(shù)據(jù)。在不同的雨量場景下,紅外雨量計(jì)

八位單片機(jī)的大數(shù)處理算法及在數(shù)控中的應(yīng)用
電子發(fā)燒友網(wǎng)站提供《八位單片機(jī)的大數(shù)處理算法及在數(shù)控中的應(yīng)用.pdf》資料免費(fèi)下載
發(fā)表于 10-25 10:09
?0次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論