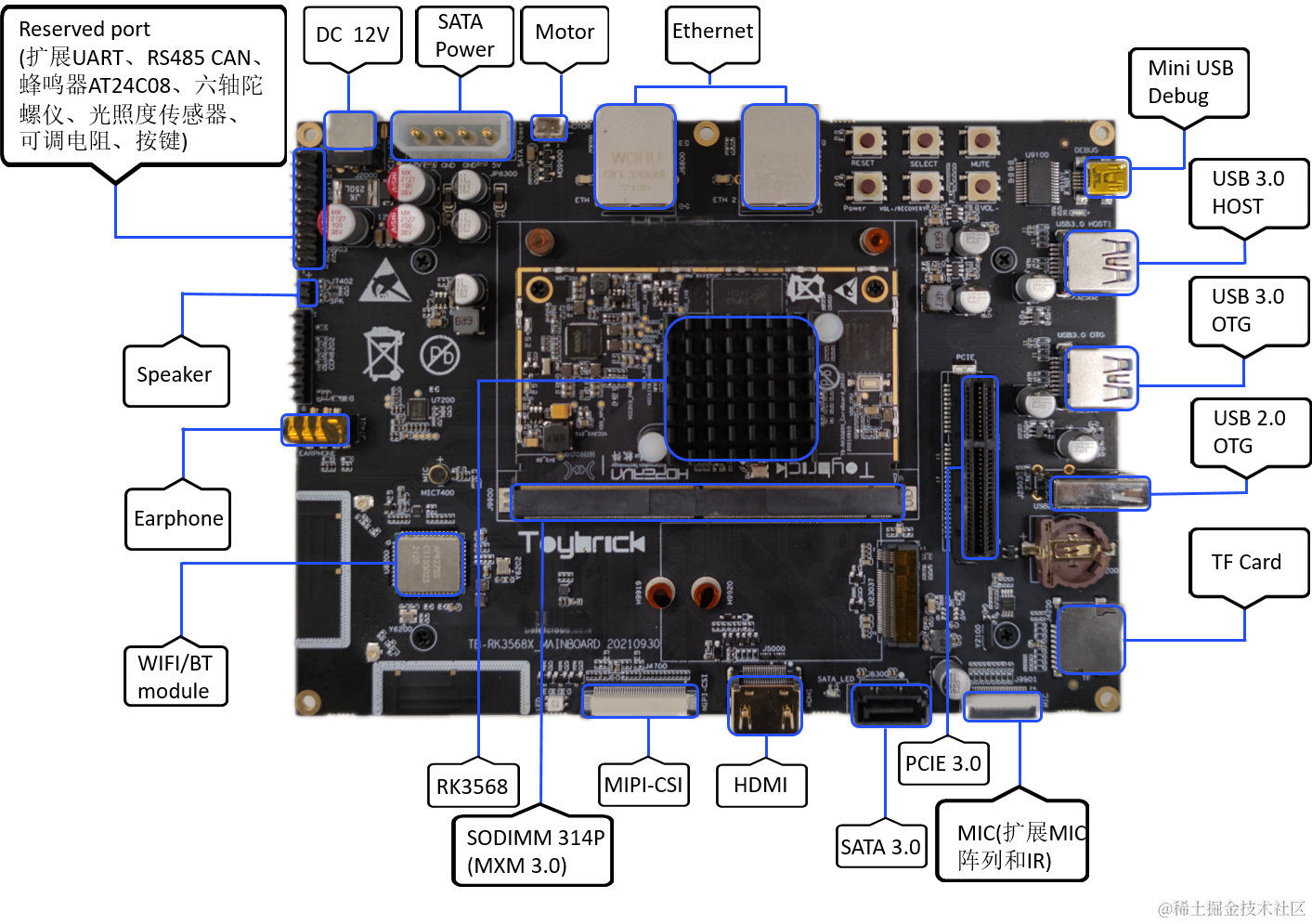
 RK3568開發板外接超聲波傳感器測距模塊
RK3568開發板外接超聲波傳感器測距模塊
超聲波傳感器測距模塊
1 模塊說明
HC-SR04 傳感器模塊如下圖所示:
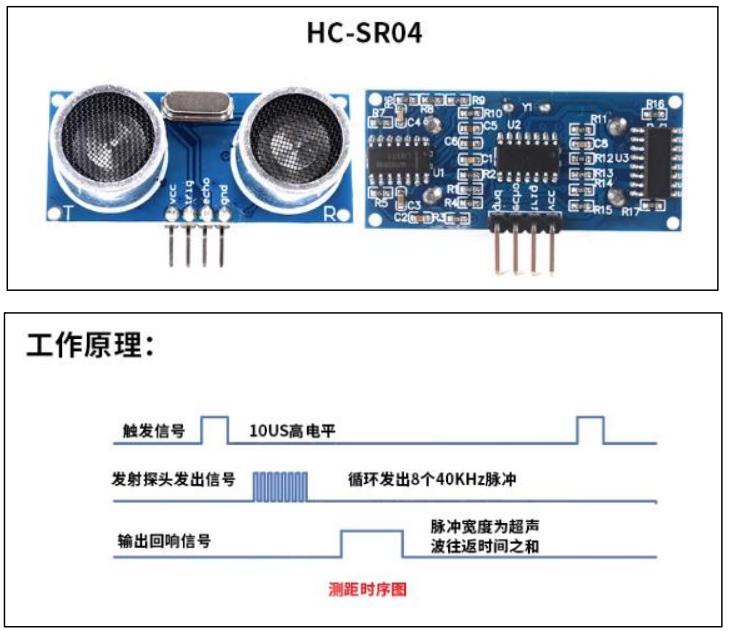
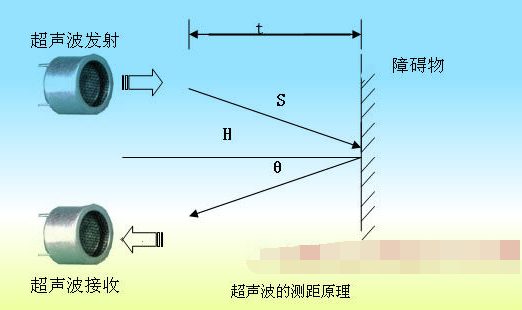
只需要在 Trig 管腳輸入一個 10US 以上的高電平,系統便可發出 8 個 40KHZ 的超聲波脈沖,然后檢測回波信號。當檢測到回波信號后,通過 Echo 管腳輸出。
根據 Echo 管腳輸出高電平的持續時間可以計算距離值,即距離值為︰(高電平時間*340m/s) /2。當測量距離超過 HC-SRO4 的測量范圍時,仍會通過 Echo 管腳輸出高電平的信號,高電平的寬度約為 66ms。
2 接線說明
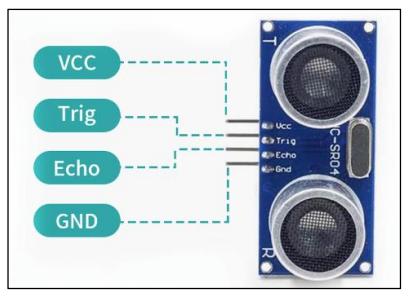
HC-SR04 傳感器模塊 4 個接口定義如下:
l VCC:接 VCC 電源(直流 5V)。
l Trig:接外部電路的 TRIG 端,向此管腳輸入一個 10US 以上的高電平,可觸發模塊測距。
l Echo:接外部電路的 ECHO 端,當測距結束時,此管腳會輸出一個高電平,電平寬度為超
聲波往返時間之和。
l GND:接外部電路的地。
3 程序測試
驅動模塊在網盤資料“iTOP-3568 開發板\02_【iTOP-RK3568 開發板】開發資料\09_系統外設功能測試\06_V1.7 底版外設快速測試資料\14_超聲波傳感器 HC-SR04 模塊\03_驅動模塊”目錄下下載。
首先將 hc-sr04.ko 驅動模塊拷貝到開發板的根目錄,然后輸入“insmod hc-sr04.ko”命令加載驅動模塊,
然后使用命令“ls /dev/sr04”進行設備節點的查看,
然后下載網盤資料“iTOP-3568 開發板\02_【iTOP-RK3568 開發板】開發資料\09_系統外設功能測試\06_V1.7 底版外設快速測試資料\14_超聲波傳感器 HC-SR04 模塊\04_測試程序”下的測試程序。將 sr04_test 可執行文件拷貝到開發板的根目錄下,
sr04 節點就是超聲波傳感器測距模塊的設備節點文件,然后使用命令“./sr04_test ”運行超聲波傳感器測距模塊的測試程序,可以看到檢測到當前距離值被打印出來,至此超聲波傳感器測距模塊測試就完成了。

更多教程關注B站:北京迅為電子
-
傳感器
+關注
關注
2541文章
49961瀏覽量
747516 -
模塊
+關注
關注
7文章
2613瀏覽量
47012 -
開發板
+關注
關注
25文章
4771瀏覽量
96176
發布評論請先 登錄
相關推薦
國產核心板全面進攻-RK3568開發板評測


在全志H616核桃派開發板上實現超聲波傳感器測距
鴻蒙OpenHarmony南向:【RK3568開發板介紹】







 工商網監
工商網監
評論