 CCV 2023 | SparseBEV:高性能、全稀疏的純視覺3D目標檢測器
CCV 2023 | SparseBEV:高性能、全稀疏的純視覺3D目標檢測器
本文介紹在3D 目標檢測領域的新工作:SparseBEV。我們所處的 3D 世界是稀疏的,因此稀疏 3D 目標檢測是一個重要的發展方向。然而,現有的稀疏 3D 目標檢測模型(如 DETR3D[1],PETR[2] 等)和稠密 3D 檢測模型(如 BEVFormer[3],BEVDet[8])在性能上尚有差距。針對這一現象,我們認為應該增強檢測器在 BEV 空間和 2D 空間的適應性(adaptability)。
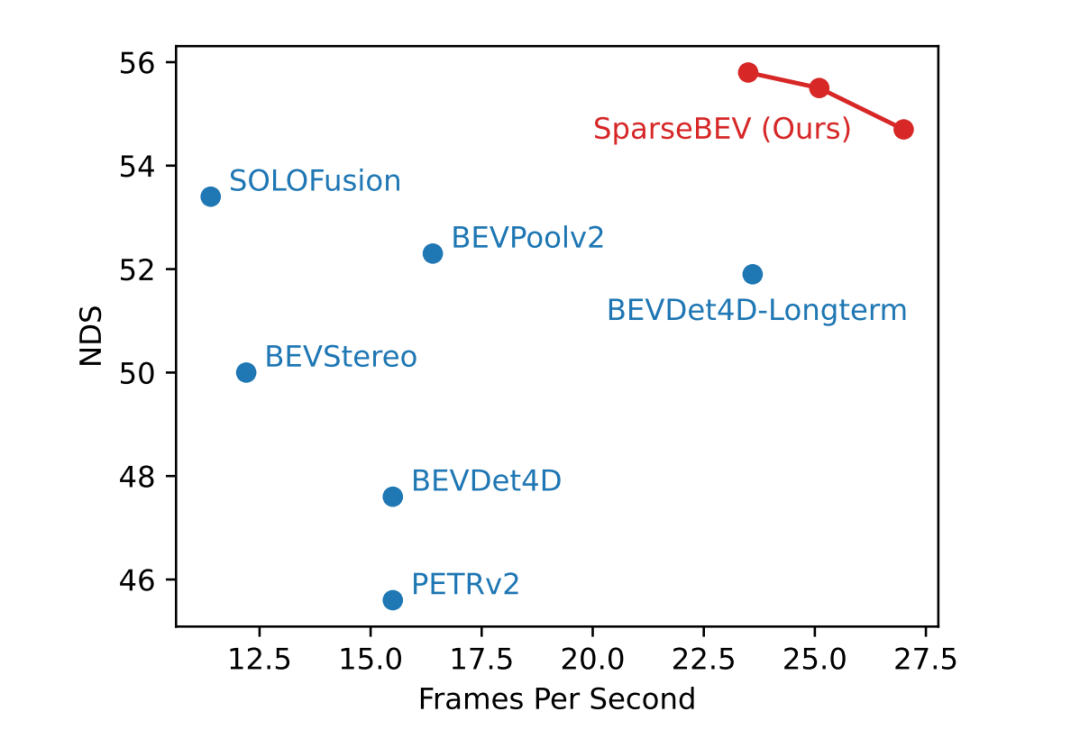
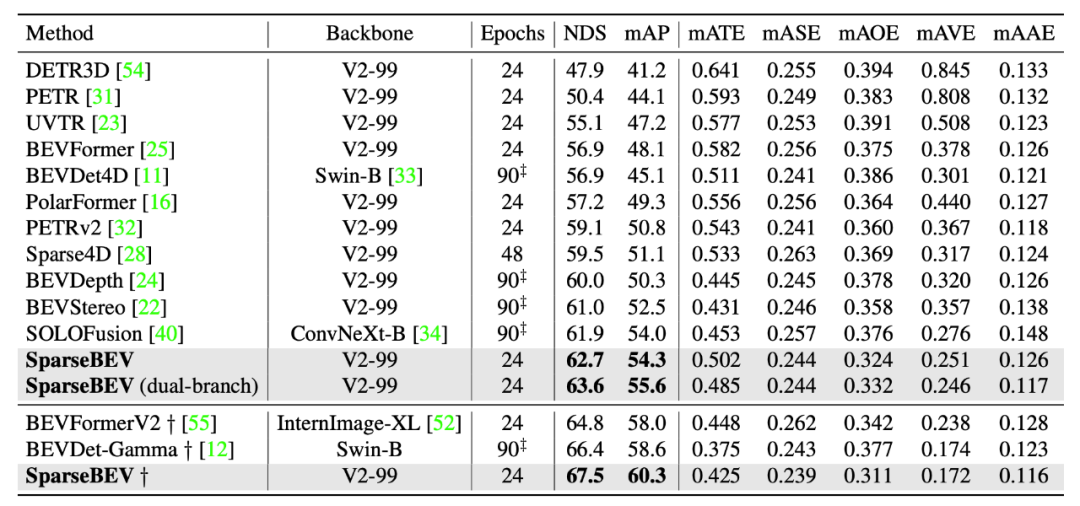
基于此,我們提出了高性能、全稀疏的 SparseBEV 模型。在 nuScenes 驗證集上,SparseBEV 在取得 55.8 NDS 性能的情況下仍能維持 23.5 FPS 的實時推理速度。在 nuScenes 測試集上,SparseBEV 在僅使用 V2-99 這種輕量級 backbone 的情況下就取得了 67.5 NDS 的超強性能。如果用上 HoP[5] 和 StreamPETR-large[6] 等方法中的 ViT-large 作為 backbone,沖上 70+ 不在話下。
我們的工作已被 ICCV 2023 接收,論文、代碼和權重(包括我們在榜單上 67.5 NDS 的模型)均已公開:
論文標題:
SparseBEV: High-Performance Sparse 3D Object Detection from Multi-Camera Videos
論文鏈接:https://arxiv.org/abs/2308.09244
代碼鏈接:https://github.com/MCG-NJU/SparseBEV

引言
現有的 3D 目標檢測方法可以被分類為兩種:基于稠密 BEV 特征的方法和基于稀疏 query 的方法。前者需要構建稠密的 BEV 空間特征,雖然性能優越,但是計算復雜度較大;基于稀疏 query 的方法避免了這一過程,結構更簡單,速度也更快,但是性能還落后于基于 BEV 的方法。因而我們自然而然地提出疑問:基于稀疏 query 的方法是否可以實現和基于稠密 BEV 的方法接近甚至更好的性能?
根據我們的實驗分析,我們認為實現這一目標的關鍵在于提升檢測器在 BEV 空間和 2D 空間的適應性。這種適應性是針對 query 而言的,即對于不同的 query,檢測器要能以不同的方式來編碼和解碼特征。這種能力正是之前的全稀疏 3D 檢測器 DETR3D 所欠缺的。
因此,我們提出了 SparseBEV,主要做了三個改進。首先,設計了尺度自適應的自注意力模塊(scale-adaptive self attention, SASA)以實現在 BEV 空間的自適應感受野。其次,我們設計了自適應性的時空采樣模塊以實現稀疏采樣的自適應性,并充分利用長時序的優勢。最后,我們使用動態 Mixing 來自適應地 decode 采到的特征。
早在今年的2月9日,ICCV 投稿前夕,我們的 SparseBEV(V2-99 backbone)就已經在 nuScenes 測試集上取得了65.6 NDS 的成績,超過了 BEVFormer V2[7] 等方法。如下圖所示,該方案命名為 SparseBEV-Beta,具體可見 eval.ai 榜單:https://eval.ai/web/challenges/challenge-page/356/leaderboard/1012
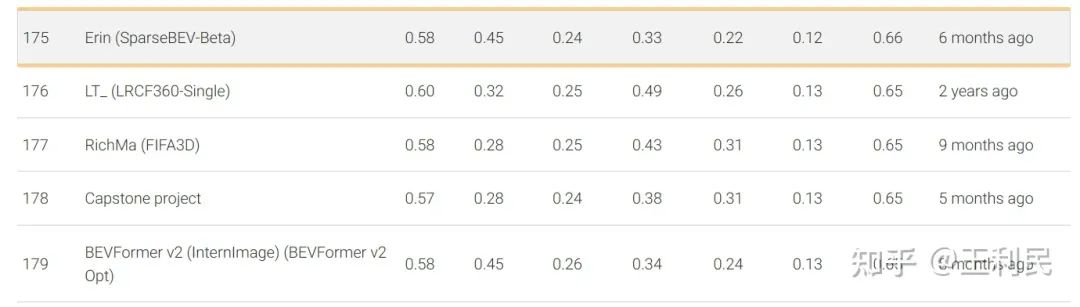
最近,我們采用了一些來自 StreamPETR 的最新 setting,包括將 bbox loss 的 X 和 Y 的權重調為 2.0,并使用 query denoising 來穩定訓練等等。現在,僅采用輕量級 V2-99 作為 backbone 的 SparseBEV 在測試集上就能夠實現 67.5 NDS 的超強性能,在純視覺 3D 檢測排行榜中排名第四(前三名均使用重量級的 ViT-large 作為 backbone):

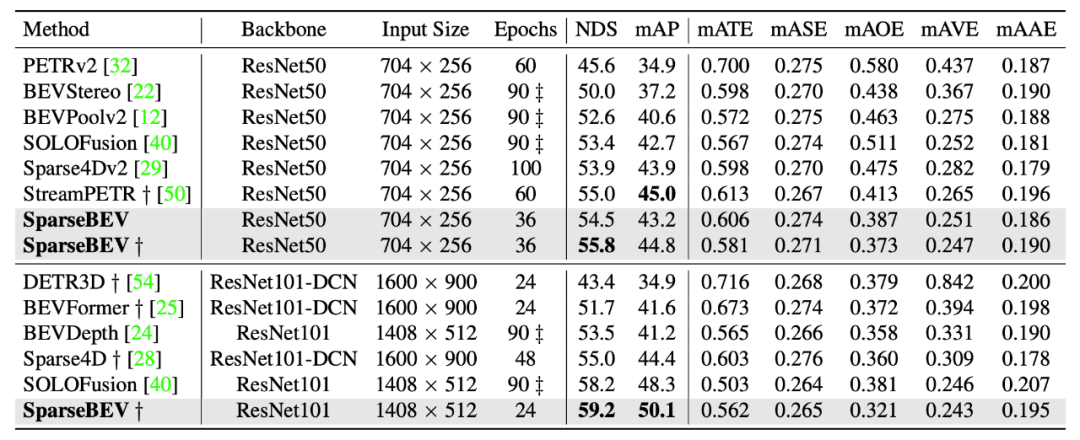
在驗證集的小規模的 Setting(ResNet50,704x256)下,SparseBEV 能取得 55.8 NDS 的性能,同時保持 23.5 FPS 的實時推理速度,充分發揮了 Sparse 設計帶來的優勢。

方法
模型架構
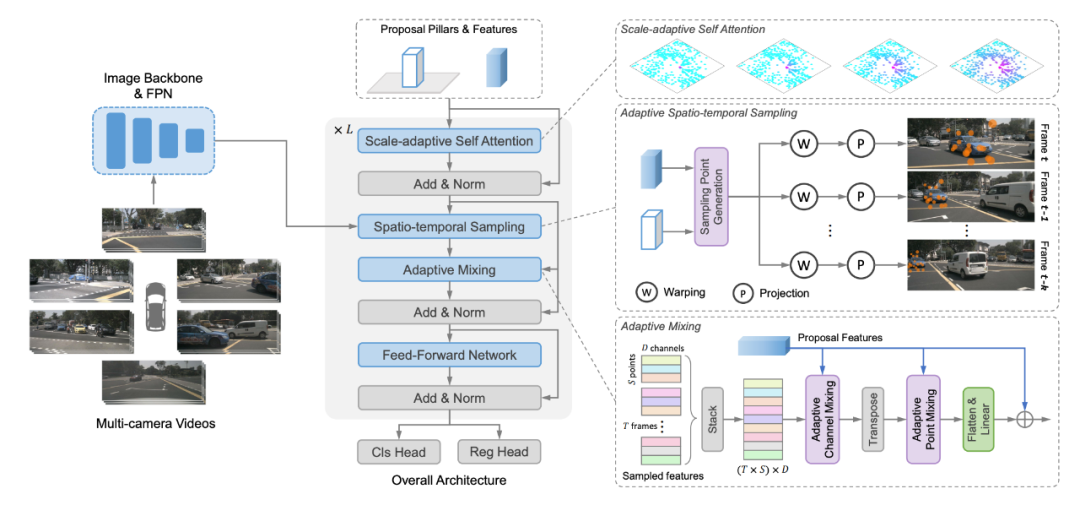
SparseBEV 的模型架構如上所示,其核心模塊包括尺度自適應自注意力、自適應時空采樣、自適應融合。
Query Initialization
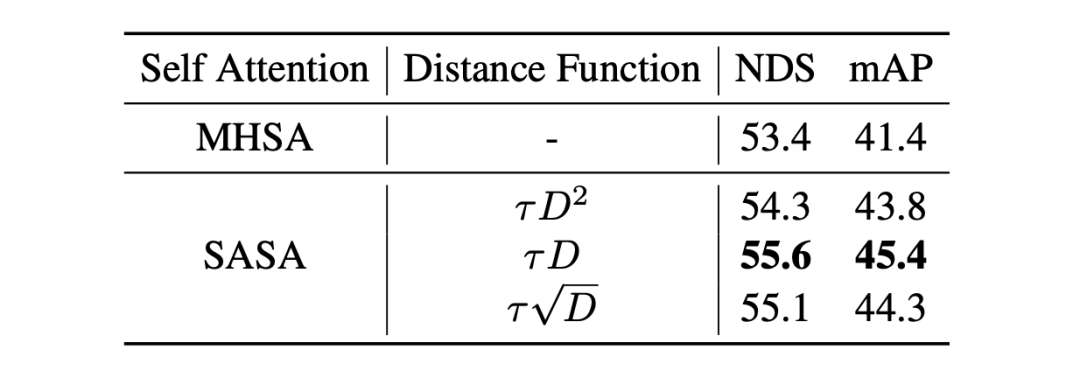
現有 query-based 方法都用 reference point 作為 query。在 SparseBEV 中,Query 包含的信息更豐富, 包括3D坐標 、尺寸 、旋轉角 、速度 ,以及對應的 維特征。每個 query 都被初始化為 pillar 的形狀, 為 0 且 約為 4,這是因為自駕場景中一般不會在 軸上出現多個物體。Scale-adaptive Self AttentionBEV 空間的多尺度特征提取很重要。基于 Dense BEV 的方法往往通過 BEV Encoder 來顯式聚合多尺度特征(比如 BEVDet[8] 用 ResNet+FPN 組成 BEV Encoder 來提取多尺度的 BEV 特征,BEVFormer 則使用 Multi-scale Deformable Attention 來實現 BEV 空間的多尺度),而基于稀疏 query 方法則做不到這一點。我們認為,稀疏 query 之間的 self attention 可以起到 BEV Encoder 的作用,而 DETR3D 中使用的標準的 Multi-head self attention (MHSA) 并不具備多尺度能力。因此,我們提出了尺度自適應自注意力模塊(scale-adaptive self attention, SASA),讓模型自己去決定合適的感受野:
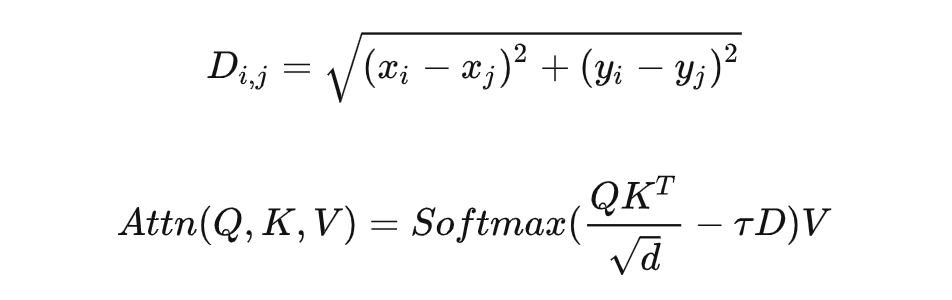
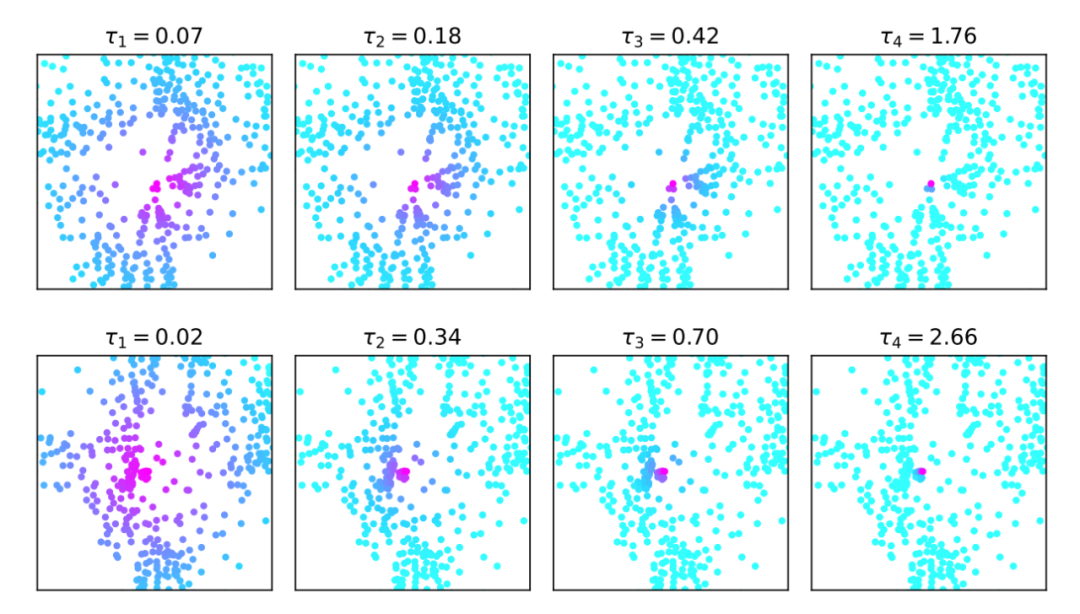
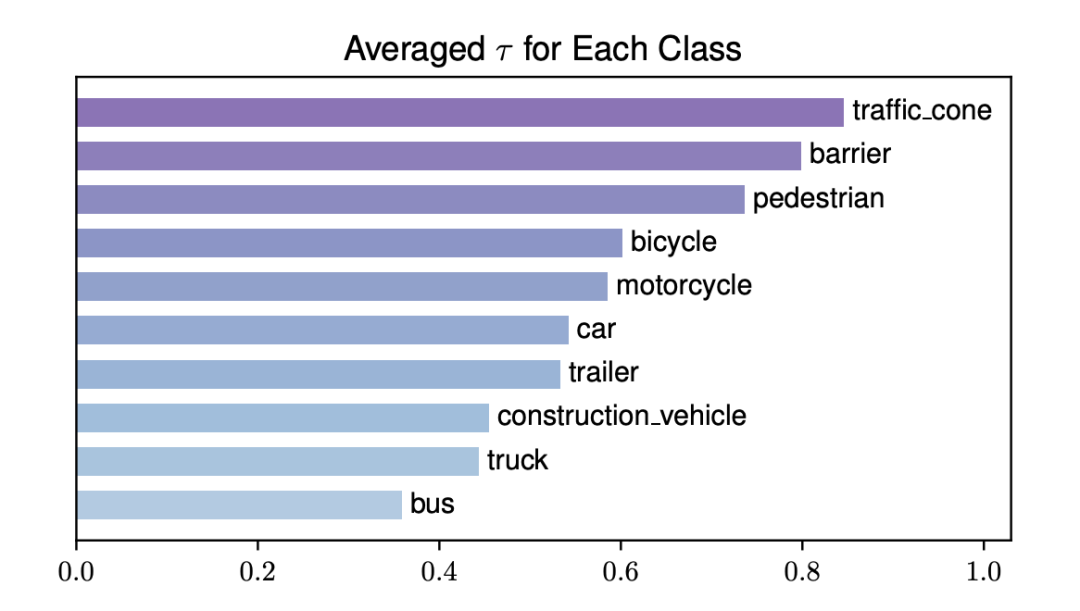
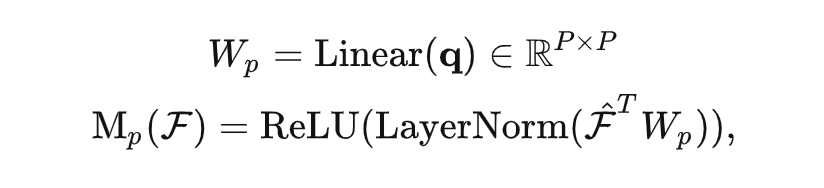
其中 表示兩個 query 中心點之間的歐式距離, 表示感受野的控制系數,隨著 增大,遠距離的 query 的注意力權重減小,感受野相應縮小。當 時,SASA 退化為標準的擁有全局感受野的自注意力模塊。這里的 是通過對每個 query feature 使用一層 Linear 自適應生成的,并且每 個 head 生成的 都不同:

Adaptive Spatio-temporal Sampling
對于每個 query,我們對 query feature 使用一層 Linear 生成一系列 3D Offset:。接著,我們將這些 offset 相對于 query pillar 進行坐標變換以得到 3D 采樣點。采樣點生成過程如下: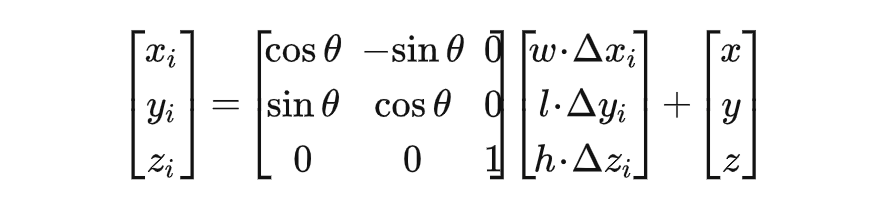 ?
?這樣,我們生成的采樣點可以適應于給定的 query,從而能夠更好地處理不同尺寸、遠近的物體。同時,這些采樣點并不局限于給定的 query bbox 內部,它們甚至可以撒到框外面去,這由模型自己決定。
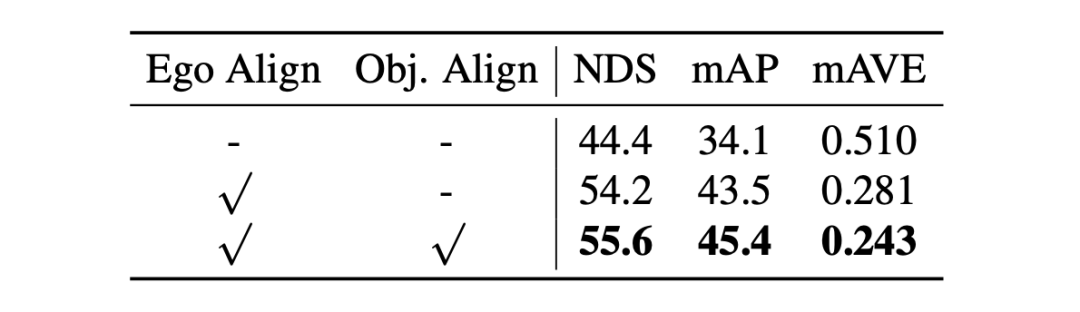
接著,為了進一步捕捉長時序的信息,我們將采樣點 warp 到不同時刻的坐標系中,以此實現幀間對齊。在自動駕駛場景中,有兩種類型的運動:一是車自身的運動(ego motion),二是其他物體的運動(object motion)。對于 ego motion,我們使用數據集提供的 ego pose 來實現對齊;對于 object motion,我們利用 query 中定義的瞬時速度向量,并配合一個簡單的勻速運動模型來對運動物體進行自適應的對齊。這兩種對齊操作都能漲點:
對于稀疏采樣這塊,我們后來也基于 Deformable DETR 寫了一個 CUDA 優化。不過,純 PyTorch 實現其實也挺快的,CUDA 優化進一步提速了 15% 左右。
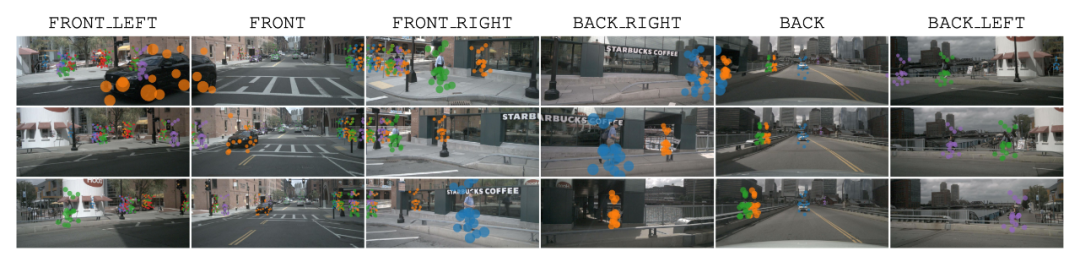
我們還提供了采樣點的可視化(第一行是當前幀,二三兩行是歷史前兩幀),可以看到,SparseBEV 的采樣點精準捕捉到了場景中不同尺度的物體(即在空間上具備適應性),且對于不同運動速度的物體也能很好的對齊(即在時間上具備適應性)。
Adaptive Mixing
接著,我們對采到的特征的 channel 和 point 兩個維度分別進行 adaptive mixing[9]。假設共計 幀,每幀 個采樣點,我們首先將其堆疊為 個采樣點。因此 SparseBEV 屬于堆疊時序方案,可以很容易地融合未來幀的信息。接著,我們對這些采樣點得到的特征進行 channel mixing,其中 mixing 的權重是根據 query feature 動態生成的:
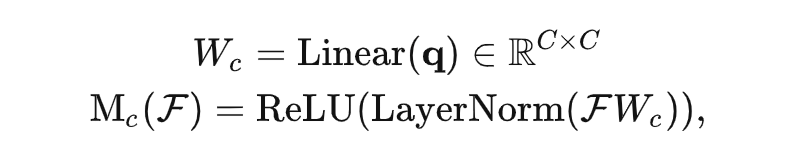
隨后對 point 維度進行同樣的 mixing 操作:
Dual-branch SparseBEV
在實驗中,我們發現將輸入的多幀圖像分為 Fast、Slow 兩個分支處理可以進一步提升性能。具體地,我們將輸入分為高分辨率、低幀率的 Slow 分支和低分辨率、高幀率的 Fast 分支。于是,Slow 分支專注于提取高分辨率的靜態細節,而 Fast 分支則專注于捕獲運動信息。加入 Dual-branch 的 SparseBEV 結構圖如下所示: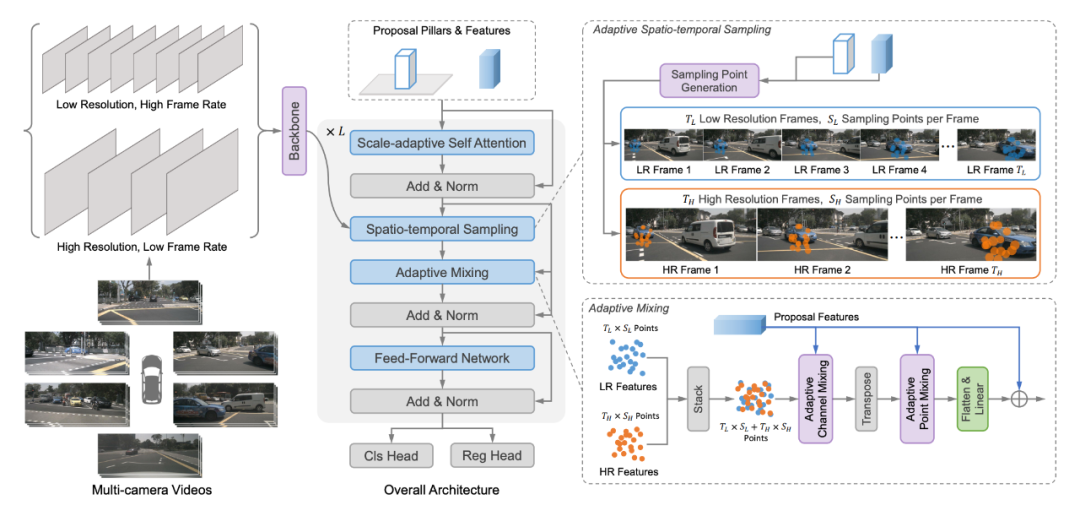 Dual-branch 設計不光減小了訓練開支,還顯著提升了性能,具體可見補充材料。它的漲點說明了自駕長時序中的靜態細節和運動信息應該解耦處理。但是,它把整個模型搞得太復雜,因此我們默認情況下并沒有使用它(本文中只有測試集 NDS=63.6 的那行結果用了它)。
Dual-branch 設計不光減小了訓練開支,還顯著提升了性能,具體可見補充材料。它的漲點說明了自駕長時序中的靜態細節和運動信息應該解耦處理。但是,它把整個模型搞得太復雜,因此我們默認情況下并沒有使用它(本文中只有測試集 NDS=63.6 的那行結果用了它)。

實驗結果
nuScenes test split
 ?
?局限性
SparseBEV 的弱點還不少:1. SparseBEV 非常依賴 ego pose 來實現幀間對齊。在論文的 Table 5 中,如果不使用 ego-based warping,NDS 能掉 10 個點左右,幾乎和沒加時序一樣。2. SparseBEV 中使用的時序建模屬于堆疊時序,它的耗時和輸入幀數成正比。當輸入幀數太多的時候(比如 16 幀),會拖慢推理速度。3. 目前 SparseBEV 采用的訓練方式還是傳統方案。對于一次訓練迭代,DataLoader 會將所有幀全部 load 進來。這對于機器的 CPU 能力有較高的要求,因此我們使用了諸如 TurboJPEG 和 Pillow-SIMD 庫來加速 loading 過程。接著,所有的幀全部會經過 backbone,對 GPU 顯存也有一定要求。對于 ResNet50 和 8 幀 704x256 的輸入來說,2080Ti-11G 還可以塞下;但如果把分辨率、未來幀等等都拉滿,就只有 A100-80G 可以跑了。我們開源的代碼中使用的 Training 配置均為能跑的最低配置。目前有兩種解決方案:A. 將部分視頻幀的梯度截斷。我們開源的 config 中有個 stop_prev_grad 選項,它會將所有之前幀都以 no_grad 模式推理,只有當前幀會有梯度回傳。B. 另一種解決方案是采用 SOLOFusion、StreamPETR 等方法中使用的 sequence 訓練方案,省顯存省時間,我們未來可能會嘗試。
 ?
?結論
本文中,我們提出了一種全稀疏的單階段 3D 目標檢測器 SparseBEV。SparseBEV 通過尺度自適應自注意力、自適應時空采樣、自適應融合三個核心模塊提升了基于稀疏 query 模型的自適應性,取得了和基于稠密 BEV 的方法接近甚至更優的性能。此外我們還提出了一種 Dual-branch 的結構進行更加高效的長時序處理。SparseBEV 在 nuScenes 同時實現了高精度和高速度。我們希望該工作可以對稀疏 3D 檢測范式有所啟發。
參考文獻
?[1] Wang Y, Guizilini V C, Zhang T, et al. Detr3d: 3d object detection from multi-view images via 3d-to-2d queries[C]//Conference on Robot Learning. PMLR, 2022: 180-191.[2] Liu Y, Wang T, Zhang X, et al. Petr: Position embedding transformation for multi-view 3d object detection[C]//European Conference on Computer Vision. Cham: Springer Nature Switzerland, 2022: 531-548.[3] Li Z, Wang W, Li H, et al. Bevformer: Learning bird’s-eye-view representation from multi-camera images via spatiotemporal transformers[C]//European conference on computer vision. Cham: Springer Nature Switzerland, 2022: 1-18.[4] Park J, Xu C, Yang S, et al. Time will tell: New outlooks and a baseline for temporal multi-view 3d object detection[J]. arXiv preprint arXiv:2210.02443, 2022.[5] Zong Z, Jiang D, Song G, et al. Temporal Enhanced Training of Multi-view 3D Object Detector via Historical Object Prediction[J]. arXiv preprint arXiv:2304.00967, 2023.[6] Wang S, Liu Y, Wang T, et al. Exploring Object-Centric Temporal Modeling for Efficient Multi-View 3D Object Detection[J]. arXiv preprint arXiv:2303.11926, 2023.[7] Yang C, Chen Y, Tian H, et al. BEVFormer v2: Adapting Modern Image Backbones to Bird's-Eye-View Recognition via Perspective Supervision[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2023: 17830-17839.[8] Huang J, Huang G, Zhu Z, et al. Bevdet: High-performance multi-camera 3d object detection in bird-eye-view[J]. arXiv preprint arXiv:2112.11790, 2021.[9] Gao Z, Wang L, Han B, et al. Adamixer: A fast-converging query-based object detector[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022: 5364-5373.
·
-
物聯網
+關注
關注
2903文章
44262瀏覽量
371221
原文標題:CCV 2023 | SparseBEV:高性能、全稀疏的純視覺3D目標檢測器
文章出處:【微信號:tyutcsplab,微信公眾號:智能感知與物聯網技術研究所】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
全新升級,洛微發布高性能3D工業相機,為機器視覺注入新動能
微視傳感高性能3D視覺產品亮相2024上海機器視覺展

微波檢測器的工作原理 微波檢測器的性能參數
Cognex發布了In-Sight? L38 3D視覺系統,為3D檢測設立新標準
Nullmax提出多相機3D目標檢測新方法QAF2D

標注神器!AAAI'24最新:第一個交互式3D目標檢測器!

如何搞定自動駕駛3D目標檢測!

ad中3d封裝放到哪個層
2D與3D視覺技術的比較
圖漾科技發布3D工業視覺應用開發平臺Vision++
藍芯科技正式發布全球首款「純」3D視覺移動機器人VMR產品
倍加福全新3D視覺傳感器的工作原理和典型應用

3D視覺的三大優勢





 工商網監
工商網監
評論