 為什么rs觸發器可以消除機械抖動
為什么rs觸發器可以消除機械抖動
RS觸發器可以消除機械抖動的原因是它具有鎖存的功能,可以穩定輸入信號的狀態。機械抖動是指接觸或按下開關等機械裝置時,因為機械元件的震動或不穩定造成的短期的信號變化。
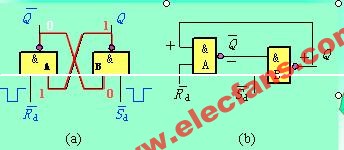
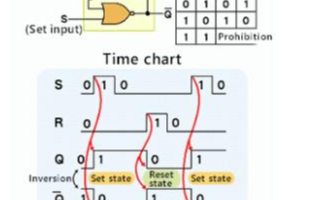
RS觸發器是一種基本的數字邏輯電路,它由兩個輸入(R和S)和兩個輸出(Q和Q‘)組成。R和S分別代表復位(Reset)和置位(Set)信號。當R和S都是邏輯低電平時,RS觸發器會保持上一個狀態不變。當R和S都是邏輯高電平時,RS觸發器會進入禁止狀態。而當R為邏輯低電平,S為邏輯高電平時,輸出Q會被置為高電平(或邏輯“1”),輸出Q’會被置為低電平(或邏輯“0”);反之,當S為邏輯低電平,R為邏輯高電平時,Q會被置為低電平,Q‘會被置為高電平。
當機械抖動引起開關信號產生瞬時的多個開關狀態變化時,這種變化可能會導致錯誤的結果。但是,將機械開關的輸出連接到RS觸發器的輸入時,觸發器會穩定輸出正確的狀態,并消除抖動信號的影響。這是因為RS觸發器只在輸入信號穩定時才會響應狀態的改變,而當輸入信號瞬時變化時,觸發器會將之前穩定的狀態保持不變。
因此,通過使用RS觸發器可以穩定和消除機械抖動的效果,確保信號狀態的準確性和一致性。這在數字電路和系統中是一種常見的方法,用以處理機械開關等可能引起抖動的信號輸入。
rs觸發器和sr觸發器的區別
RS(Reset-Set)觸發器和SR(Set-Reset)觸發器有一些區別,盡管它們的功能和原理基本相似。以下是它們的主要區別:
1. 輸入極性:RS觸發器的輸入極性是低電平有效,即當R和S都為低電平時觸發器保持狀態不變。而SR觸發器的輸入極性則是高電平有效,當S和R都為高電平時觸發器保持狀態不變。
2. 禁止狀態:RS觸發器存在一種禁止狀態,即當R和S同時為高電平時觸發器進入禁止狀態,輸出無效。這是因為RS觸發器中的兩個輸入雖然同時具有邏輯“1”,但其輸入狀態不確定,可能導致無效的輸出。SR觸發器則不存在禁止狀態,即使S和R同時為高電平,觸發器仍能正確工作。
3. 觸發方式:RS觸發器通常使用異步觸發方式,即當輸入信號發生變化時,立即作用于觸發器的狀態。SR觸發器可以采用同步(時鐘觸發)或異步觸發方式,取決于具體設計。
需要注意的是,為了防止不確定性的輸入狀態,通常在實際電路設計中,會對RS和SR觸發器的輸入進行控制,使其不同時置為邏輯高電平。例如,通過使用門電路實現預防輸入重合狀態。
盡管RS和SR觸發器有區別,但它們都是基本的數字邏輯電路元件,用于存儲和操作二進制數據。在實際應用中,選擇使用RS觸發器還是SR觸發器取決于具體需求和設計要求。
rs和sr觸發器的工作原理
RS(Reset-Set)觸發器和SR(Set-Reset)觸發器是基本的數字邏輯電路元件,用于存儲和操作二進制數據。它們具有類似的工作原理,但又有所區別。
1. RS觸發器的工作原理:
- RS觸發器由兩個輸入:R(復位)和S(置位)構成。輸出有兩個:Q(主輸出)和Q’(補碼輸出)。
- 當R和S都為低電平(通常為0)時,RS觸發器保持上一個狀態不變。
- 當R為低電平,S為高電平時,Q為高電平,Q‘為低電平。這將觸發觸發器進入“置位”狀態。
- 當S為低電平,R為高電平時,Q為低電平,Q’為高電平。這將觸發觸發器進入“復位”狀態。
- 當R和S同時為高電平時,觸發器進入禁止狀態,輸出無效,狀態不確定。
2. SR觸發器的工作原理:
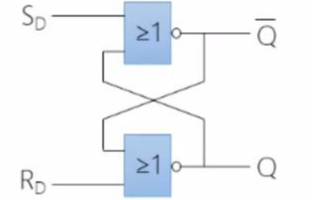
- SR觸發器也由兩個輸入:S(置位)和R(復位)構成。同樣有兩個輸出:Q(主輸出)和Q‘(補碼輸出)。
- 當S和R都為高電平時,SR觸發器保持上一個狀態不變。
- 當S為高電平,R為低電平時,Q為高電平,Q’為低電平。這將觸發觸發器進入“置位”狀態。
- 當R為高電平,S為低電平時,Q為低電平,Q‘為高電平。這將觸發觸發器進入“復位”狀態。
- 當S和R同時為低電平時,觸發器進入禁止狀態,輸出無效,狀態不確定。
需要注意的是,為了防止不確定性的輸入狀態,通常在實際電路設計中,會對RS和SR觸發器的輸入進行控制,特別是在控制輸入的變化和保證輸入信號的穩定性方面要格外注意。
RS觸發器和SR觸發器在數字邏輯電路中廣泛使用,可以用于存儲二進制數據、實現時序邏輯功能和控制電路的狀態等。
編輯:黃飛
-
邏輯電路
+關注
關注
13文章
494瀏覽量
42580 -
二進制
+關注
關注
2文章
793瀏覽量
41599 -
RS觸發器
+關注
關注
3文章
101瀏覽量
17892 -
觸發器
+關注
關注
14文章
1995瀏覽量
61051 -
數字邏輯電路
+關注
關注
0文章
106瀏覽量
15801
發布評論請先 登錄
相關推薦
RS觸發器是什么?解讀rs觸發器的作用和數字電路中的rs觸發器的作用





 工商網監
工商網監
評論