") 自動(dòng)駕駛感知技術(shù)介紹
自動(dòng)駕駛感知技術(shù)介紹
感知功能模塊負(fù)責(zé)檢測、分類和跟蹤自主車輛附近的實(shí)體和事件。來自車載傳感器的數(shù)據(jù)可與其他來源的信息相結(jié)合,如高清地圖、V2X或互聯(lián)服務(wù),以完成此任務(wù)。感知模塊負(fù)責(zé)建立和更新車輛感知范圍內(nèi)環(huán)境的虛擬表示。
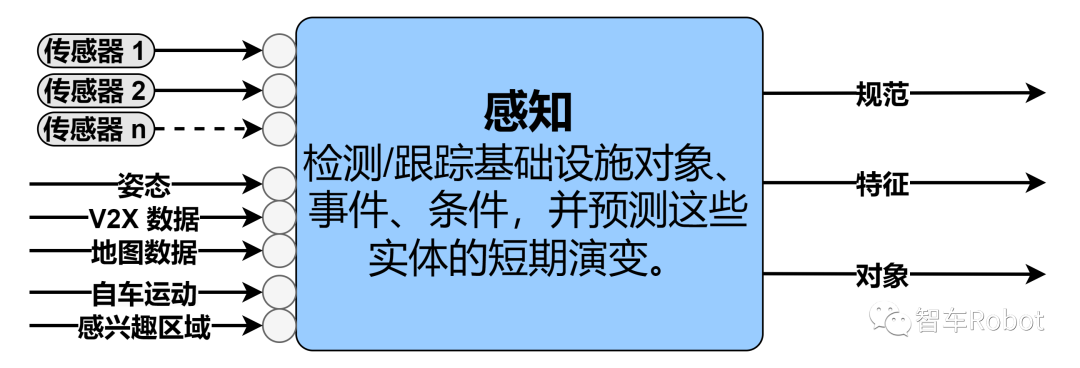
感知功能模塊圖感知模塊可能包括以下算法:?檢測基礎(chǔ)設(shè)施元素,如可行駛路面、路標(biāo)、交通燈、路緣、交通錐、施工、欄桿等,以及這些元素的動(dòng)態(tài)屬性(例如,收費(fèi)站欄桿下降,紅燈等)。
?檢測、分類和跟蹤動(dòng)態(tài)實(shí)體,如車輛、行人和障礙物。
?檢測環(huán)境條件,如可能存在的天氣、火災(zāi)/煙霧、濕滑路面。
?識(shí)別/分類更復(fù)雜的方面,如人的姿態(tài)、不穩(wěn)定駕駛、危險(xiǎn)載荷等也可能是感知模塊的一部分。感知模塊以規(guī)范格式接收環(huán)境傳感器數(shù)據(jù)作為輸入。這些數(shù)據(jù)可能來自一個(gè)或多個(gè)傳感器,這些傳感器可以基于相似或不同的傳感技術(shù)(例如,攝像頭、雷達(dá)、激光雷達(dá)、超聲波),并且可能有重疊的視野。如果同一物理實(shí)體被多個(gè)傳感器“看到”,則可以采用多傳感器融合算法來產(chǎn)生這些實(shí)體的統(tǒng)一視圖。可以采用跟蹤實(shí)體的時(shí)間變化的算法來維護(hù)這些實(shí)體的存在概率,并預(yù)測它們的路徑/狀態(tài)的短期預(yù)測。幾乎所有檢測都需要映射到一個(gè)公共的世界坐標(biāo)系統(tǒng)。
感知輸入:
?環(huán)境傳感器數(shù)據(jù):以規(guī)范形式(根據(jù)傳感器技術(shù)的不同而不同)接收來自環(huán)境傳感器的數(shù)據(jù),該數(shù)據(jù)經(jīng)過處理和/或分析,以使下游功能模塊更易于消費(fèi)和處理數(shù)據(jù),或從自主車輛的感知范圍內(nèi)提取有關(guān)環(huán)境和/或?qū)嶓w的可操作信息。
?姿態(tài):可以用于預(yù)選感知視野的某些部分進(jìn)行特征/對象檢測(無論是否使用高清地圖)。
?地圖數(shù)據(jù):可以通過將先驗(yàn)假設(shè)的基礎(chǔ)設(shè)施與來自傳感器的觀測進(jìn)行比較,使檢測更加可靠。
?自車運(yùn)動(dòng):可以用于調(diào)整傳感器的讀數(shù),以補(bǔ)償自主車輛的運(yùn)動(dòng)。
?感興趣區(qū)域(ROI):可以用于配置傳感器或算法,將注意力(分辨率/處理)集中在感知范圍的特定區(qū)域。例如,這可以幫助分辨率不均勻的傳感器進(jìn)行配置,以便具有特定興趣的道路/基礎(chǔ)設(shè)施以更高分辨率“看到”。類似地,可以提取高分辨率圖像的某些部分以全分辨率處理,以確定交通燈的狀態(tài)。
?V2X:提供了一個(gè)額外的信息來源,可以利用它使檢測更可靠(消除歧義)。
感知輸出:
?規(guī)范:可以以與原始輸入數(shù)據(jù)相同的形式輸出數(shù)據(jù),同時(shí)進(jìn)行了一些額外的處理或轉(zhuǎn)換。傳感器數(shù)據(jù)可能在不改變數(shù)據(jù)格式的基礎(chǔ)上對原始數(shù)據(jù)進(jìn)行了修改。規(guī)范的一個(gè)示例是圖像,它可以被修改但仍然是圖像(與將像素圖像轉(zhuǎn)換為物體列表形成對比)。
?特征:根據(jù)實(shí)現(xiàn)的不同而不同。它們可以表示為3D世界坐標(biāo),也可以不表示;可以跟蹤,也可以不跟蹤。
?對象:用于填充環(huán)境/世界模型。它們描述了自主車輛感知范圍內(nèi)檢測到的、對后續(xù)處理階段具有相關(guān)性的靜態(tài)和動(dòng)態(tài)實(shí)體。
?感知能力:提供有關(guān)感知功能動(dòng)態(tài)能力的信息。這可以簡單地用感知范圍以及在此范圍內(nèi)檢測的估計(jì)延遲來表達(dá)。該能力本身可以從各種照明/天氣/環(huán)境條件下的個(gè)別傳感器的能力推導(dǎo)出來。
-
傳感器
+關(guān)注
關(guān)注
2541文章
49961瀏覽量
747521 -
汽車電子
+關(guān)注
關(guān)注
3013文章
7740瀏覽量
164846 -
感知
+關(guān)注
關(guān)注
1文章
64瀏覽量
12078 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
781文章
13449瀏覽量
165265
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論