 自動駕駛系統功能自車運動與路徑規劃介紹
自動駕駛系統功能自車運動與路徑規劃介紹
自車運動
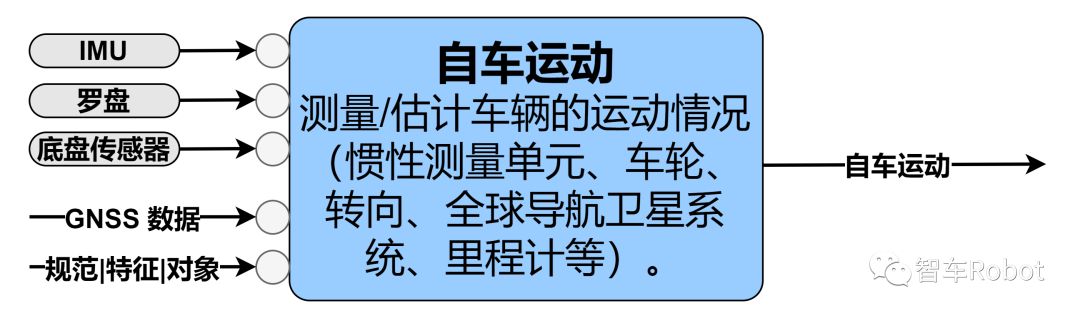
自車運動功能模塊圖自車運動模塊估計車輛隨時間姿態(位置+方向)的變化。通過多種不同類型傳感器計算和改進的運動估計的融合,可以獲得比單一傳感器測量更準確可靠的估計。根據系統的不同,使用的輸入數量各異。更簡單的自車運動組件可能只處理IMU和底盤傳感器的數據。然而,更復雜的系統可能使用所有或子集的其他輸入來計算額外的運動估計,然后將其融合在一起。
自車運動輸入:
?規范|特征|對象:使用連續的感知數據序列來估計自車運動。估計可以基于具有不同計算復雜度的各種算法。例子是光流和基于CNN的估計器,利用像素級數據或已經檢測到的特征。也可以利用已分類的對象與已知速度(例如護欄)。
?底盤傳感器數據:包含控制/執行器反饋,改進自車運動估計。
?IMU數據:包含加速度計和陀螺儀傳感器數據,提供自車運動估計。
?羅盤數據:提供絕對旋轉測量,改進自車運動估計。
?GNSS數據:從多個順序的地理空間位置讀數計算自車運動估計。
自車運動輸出:
?自車運動:提供自車運動估計使自動駕駛系統中的多個其他組件(例如感知或定位)能夠完成其任務。
路徑規劃
路徑規劃功能模塊圖
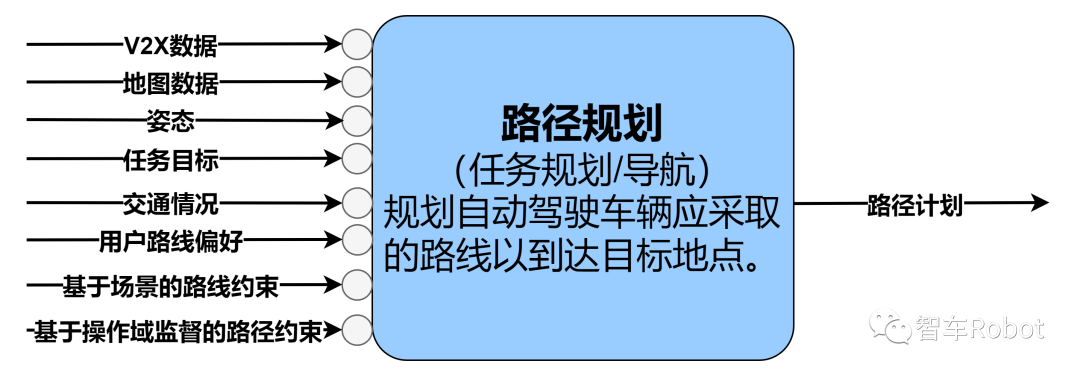
路徑規劃功能模塊提供算法來確定實時路徑以到達目標目的地。它接受駕駛員所需的目的地,并從車輛當前位置計算到達該目的地的最短路徑,同時考慮駕駛員偏好和交通條件。也稱為任務規劃,它負責將“從A到B”的期望任務分解成結構化的道路片段,如所提供的地圖(典型示例是提供車道級子任務)所指定和定義的。一組車道級子任務被輸出,它們描述了車輛在每個交叉口的所需車道和轉向。此外,當車輛完成當前的車道級子任務時,它會自動計算下一組目標并提供下一個車道級子任務。在設有停止標志、交通燈或讓行要求的交叉口,該模塊參考來自感知系統的輸入來決定汽車是否可以進行到下一個提交。
路徑規劃輸入:
?V2X數據:用于接收交通信息或道路警報。
?地圖數據:計算路線。
?姿態:提供路線的起點。
?任務目標:指定目標目的地。
?交通狀況:提供自主車輛附近或路線計劃上的交通狀況的動態源信息。
?用戶路線偏好:提供約束路線選擇的偏好或規則。可能包括乘車服務或自主車輛本身保持在操作設計域內或避免收費道路的約束。
?基于場景的路線約束:提供動態確定的路線約束,如封閉道路標志、高速公路上封閉的車道或用路障封閉的高速公路入口。
?基于操作域監控的路線約束:由于需要保持在操作設計域內而對路線進行約束。一個示例是由于缺乏路燈照明而在某些時間避免某些路線。
路徑規劃輸出:
?路徑計劃:提供自主車輛將要走的路線描述,包括適用的車道,以達到目標目的地。
-
模塊
+關注
關注
7文章
2671瀏覽量
47341 -
汽車電子
+關注
關注
3024文章
7869瀏覽量
166508 -
車輛
+關注
關注
0文章
81瀏覽量
15117 -
自動駕駛
+關注
關注
783文章
13684瀏覽量
166147
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論