 如何實現厘米級高度定位
如何實現厘米級高度定位
一、背景
前文《衛星定位技術學習筆記》已經介紹了一下GNSS定位技術,并簡單介紹了一下高精度定位技術。目前室外使用最廣泛的定位手段是GNSS定位,常規的GNSS定位精度約5、10米左右,無法滿足高精度場景的應用,如何提升GNSS定位性能是亟待解決的問題。本文由淺入深剖析GNSS定位原理并介紹如何實現厘米級高度定位。
二、GNSS定位原理
1、GNSS基本概念
全球衛星導航系統(GNSS:Global Navigation Satellite System)是一種以衛星為基礎的無線電導航系統,系統可提供時間/空間基準和所有與位置信息相關的實時動態信息,又稱天基系統。GNSS是否就是GPS?答案是否定的,GNSS包含了多個國家不同的星座系統,主要有美國的GPS系統,歐盟的伽利略系統,俄羅斯的GLONASS系統,中國的北斗系統等另外還有其他的些區域定位系統,如日本QZSS等。
每個GNSS星座都是由空間星座部分、地面控制部分以及用戶設備部分組成,空間部分提供我們定位所需要的各種信息包括星歷(衛星軌道參數等信息)、發射測距信號等;地面控制部分的主要作用是根據監控到的GNSS觀測數據,計算出衛星的星歷和衛星鐘的改造參數,并反饋給衛星,同時可以對衛星進行控制以及發布指令等;用戶設備通過接收衛星信號并進行一定的解算,可以獲得自身的位置和時間等信息。
2、GNSS定位基本原理
GNSS定位的基本原理是基于測距,即根據測量得到的衛星與用戶設備之間的距離,計算用戶自身的位置。我們可以通過哪些信息來計算衛星與用戶之間的距離?已知距離信息后需要與哪些信息結合才能夠計算出用戶自身的位置?
首先分析如何獲取衛星與用戶之間的距離,接收機(即用戶設備,后續直接稱為接收機)一般可以獲取到兩類距離測量信息,一類是偽距測量,一類是載波相位測量,下面分別說明。接收機可以根據一定的方法接收到衛星發射的信號同時記錄當前接收機的時間,衛星發射時間是已知的,因此可以獲得信號在空間中傳播的時間,由于信號傳播速度為光速,因此測量得到的距離為pr稱為偽距,即pr不是真實的距離,有一定的誤差。
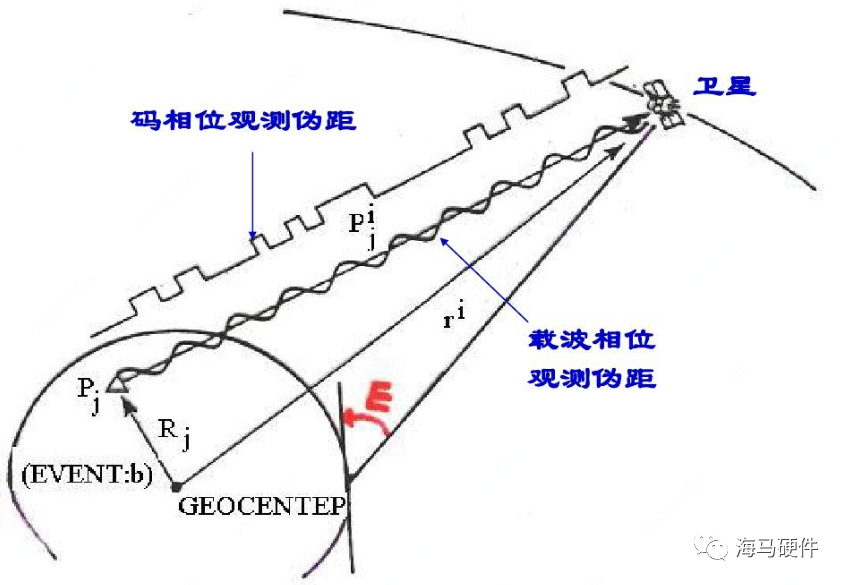
圖2偽距測量
另外一種距離信息是載波相位測距,載波相位測距不是基于信號空間傳播時間完成測量,而是利用了電磁波的相位周期性完成測量;由于GNSS信號是電磁波,相位具有周期性,因此真實的相位應該是N個整周+一個非整周相位,非整周部分可以通過鎖相環精確獲得,而整周部分N不確定,需要通過其他手段確定,即Cp=(N+γ)*入,其中N為整周,γ一般是未知的,為非整周部分,λ為信號波長。
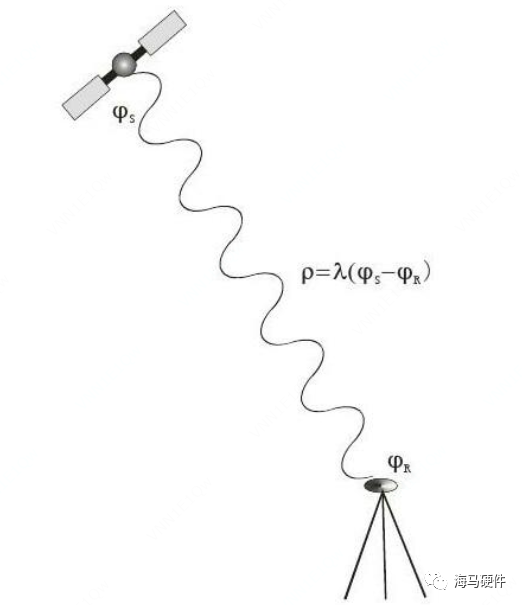
圖3 載波相位測距
載波相位測距與偽距有何區別?主要區別是精度不同,偽距精度一般是~1m,當載波相位整周模糊度固定正確時,精度為~0.001m,因此基于偽距定位精度一般是米級,根據載波相位定位度可以達到cm級。
我們獲取到衛星到接收機的距離時,需要結合哪些信息計算接收機的位置呢?其實我們還有另外一個信息.星歷信息,根據星歷信息我們可以獲取到衛星在各時刻的位詈及速度,結合衛星位置以及衛星與接收機之間的距離,通過最小二乘法或者擴展卡爾曼濾波等方法可以確定接收機的位置。
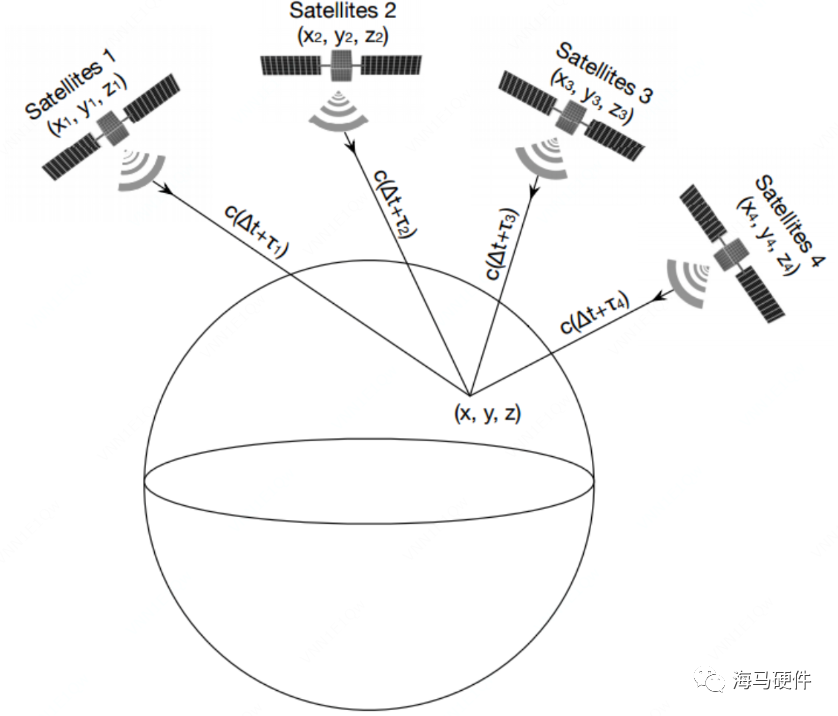
圖4GNSS定位基本原理
3、GNSS定位難點
如第2節所述,可以很簡單的計算出接收機的位置GNSS定位真的這么簡單嗎?我們詳細看一下偽距測量以及載波測量有哪些誤差源:①GNSS時鐘與接收機不同步;②不同GNSS之間時鐘也不同步;③接收機時鐘一般存在漂移;④GNSS信號在傳幡過程中;會經過大氣層和對流層,存在信號反射和折射,因此實際測距或者相位不是真實的距離;⑤接收機與衛星之間可能存在多路徑效應,致接收到的信號不是直達信號;⑥在很多地方只能收到極少數衛星無法滿足定位需求;⑦部分地方GNSS信號完全被遮擋,無法完成定位。以上只列出了部分誤差源,實際情況可能會更復雜具體分類如下:
與衛星有關的誤差:衛星軌誤差,衛星鐘差;
與傳幡途徑有關的誤差:電離層延遲,對流層延遲,多路徑效應
與接收設備有關的誤差:接收機天線相位中心的偏移和變化,接收機鐘差等;
下圖以示意圖的方式列出了各誤差源:
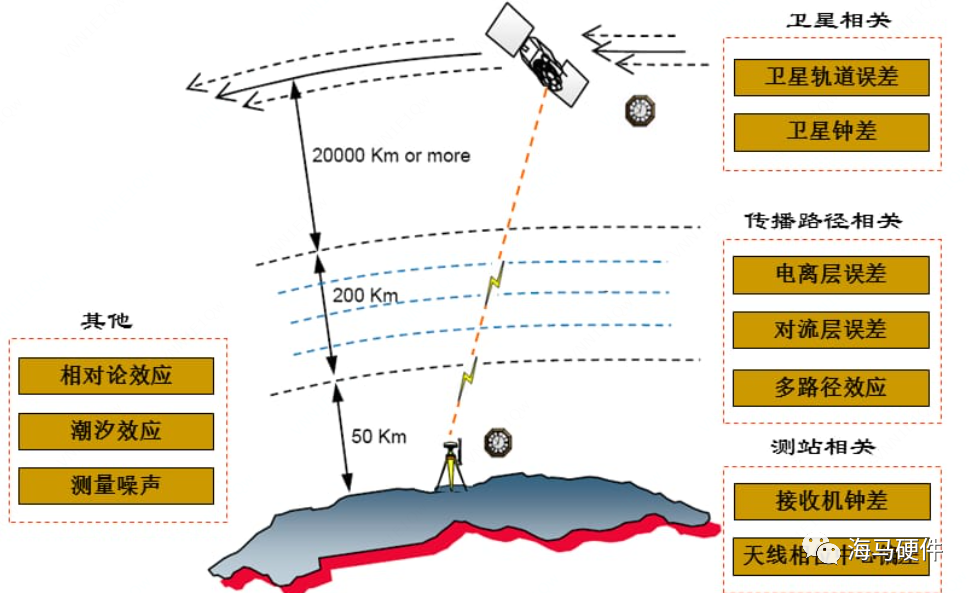
圖5 傳播過程中測距誤差
4、GNSS定位消除誤差方法
消除上述誤差一般有如下2種思路:①模型改正法:對誤差進行建模估計并補償;②求差法:通過差分將特定的誤差、消除或減弱,根據如何消除這些誤差源,實時GNSS定位可以簡單分為單點定位、以及RTK定位。
單點定位直接根據測量得到的偽距信息完成定位,定位過程中對接收機鐘差進行建模,部分算法會對電離層和對流層進行建模,計算中采用廣播星歷精度較低,最終定位精度一般是米級。
PPP是精密單點定位,是采用精密星歷并對接收機和衛星的鐘差、時鐘漂移、電離層,對流層進行建模,從而實現較高精度定位,PPP定位度可達10cm,但是一般收斂時間較慢,需要30min以上。
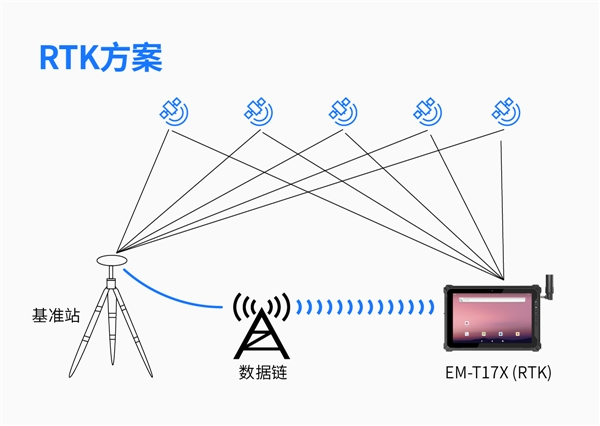
RTK是實時動態定位,除了利用接收機收到信息,還用了差分基站的信息。差分站是一個位置精確已知的高精度接收機,可以接收到與用戶接收機比較類似的GNSS信息,差分站接收到GNSS信號后,通過網絡傳輸給用戶接收機,用戶接收機通過對自身接收的信號與差分站接收到的各信息作差,可以完全消除鐘差,衛星軌道等參數影響,也可以削弱電離層和對流層的影響,為何是削弱而不是消除呢?因為此處我們假設衛星到用戶接收機的傳幡路徑中電離層與對流層特征,與衛星到差分站接收機的傳播路徑中電離層和對流層特征一致,但是在實際場景中,二者不一致,但是比較接近,因此可以削弱電離層與對流層的影響。
差分定位意圖如下:包括站間差分、星間差分以及歷元間差分。
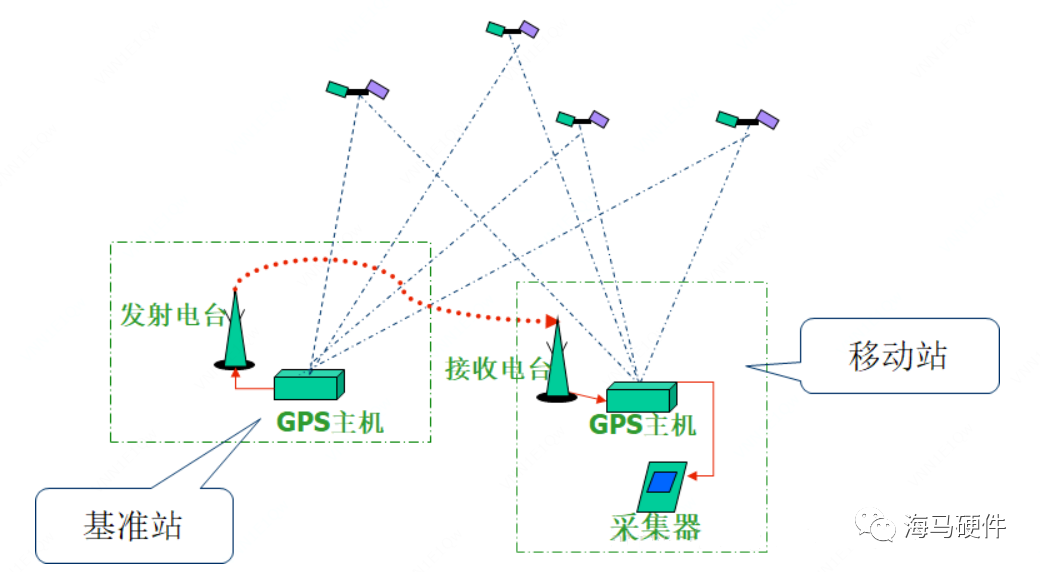
圖6差分定位示意圖
差分定位優點:①消除或減弱一些具有系統性誤差的影響;②減少平差計算中未知數的個數。差分定位缺點:①原始獨立觀測量通過求差將引起差分量之間的相關性;②平差計算中,差分法將使觀測方程數明顯減少。
5、RTK算法基本原理
RTK算法是前最常用的GNSS高度定位技術,在開闊場景下,定位度達cm級,且在幾秒內就可以完成。
上節我們介紹了測量誤差的修正,當誤差修正后我們可以采用修正后的距離測量信息,計算定位結果,高精度定位必須采用載波相位進行定位,但是載波相位存在整周模糊度問題,即必須精確已知整周模糊度才能夠獲取精確的定位結果,因此RTK算法的核心是整周模糊度固定。
理論上,整周模糊度N必須是整數但是我們根據最小二乘法或者卡爾曼濾波估計得到的N不是整數,而是實數,如何根據實數獲取到整數呢?最基本的方法是搜索即歷實數N附近的所有整數,評估定位誤差選取誤差最小的整數組合即為真實的整周N。由于測量信息中存在載波相位和偽距,二者量測精度差異較大,導致整周模糊度搜索空間巨大,復雜度高,因此我們可以通過數據轉換,消除各參數之間的相關性,縮小搜索空間,從而提升算法效率,常用的方法有lambda等。如下圖所示:參數變換前后,搜索空間明顯減小。
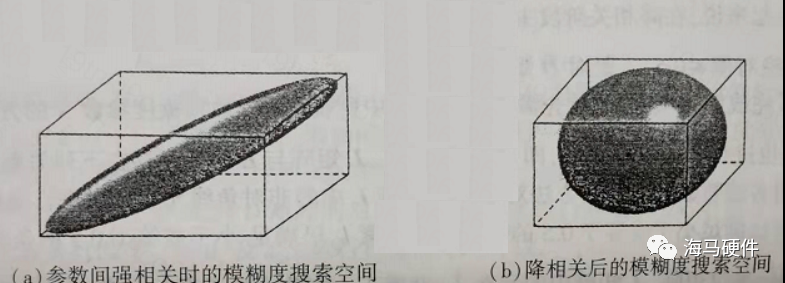
圖7 參數空間變換前后搜索空間對比
三、RTK算法缺點及改進方法
RTK定位在較為開闊環境下定位可達厘米級性能滿足高定位要求,但是在復雜環境下定位性能無法保證,因此無法通過單獨依靠RTK完成全場景高精度,我們必須通過其他手段來提升定位精度,主要有以下幾個方案:1、通過大量歷史數據分析,直接優化RTK算法;2、通過結合慣性傳感器,利用組合導航的優勢提升定位性能;3、采用其他短離高度定位的方式,比如藍牙定位以及NFC定位等。
四、成果應用及意義
高精度定位技術可以應用于共享單車/電單車、無人機定位、自動駕駛等領域。
審核編輯:彭菁
-
定位
+關注
關注
5文章
1252瀏覽量
35235 -
導航系統
+關注
關注
2文章
251瀏覽量
30550 -
GNSS
+關注
關注
9文章
726瀏覽量
47644 -
北斗系統
+關注
關注
0文章
45瀏覽量
13089
原文標題:深度剖析GNSS高精度定位原理
文章出處:【微信號:海馬硬件,微信公眾號:海馬硬件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
“厘米級”定位的藍牙5.1核心標準已來,目前有哪些芯片可供選擇?
“厘米級”gps定位預計2018年面世,無人駕駛汽車新時代將來臨
MaxCompute助力北斗大數據,千尋位置3秒實現厘米級定位
北斗衛星定位服務今年將實現實時厘米級服務的全境覆蓋
SKYLAB厘米級UWB超寬帶定位系統架構及功能
定位精準至“厘米級” 高精度“賦能”全社會
厘米級定位將推動下一代基于位置的應用程序
億道三防高精度RTK定位平板是不是真的能達到厘米級?看完你就知道了!





 工商網監
工商網監
評論