") 自動駕駛系統(tǒng)架構(gòu)狀態(tài)和配置介紹
自動駕駛系統(tǒng)架構(gòu)狀態(tài)和配置介紹
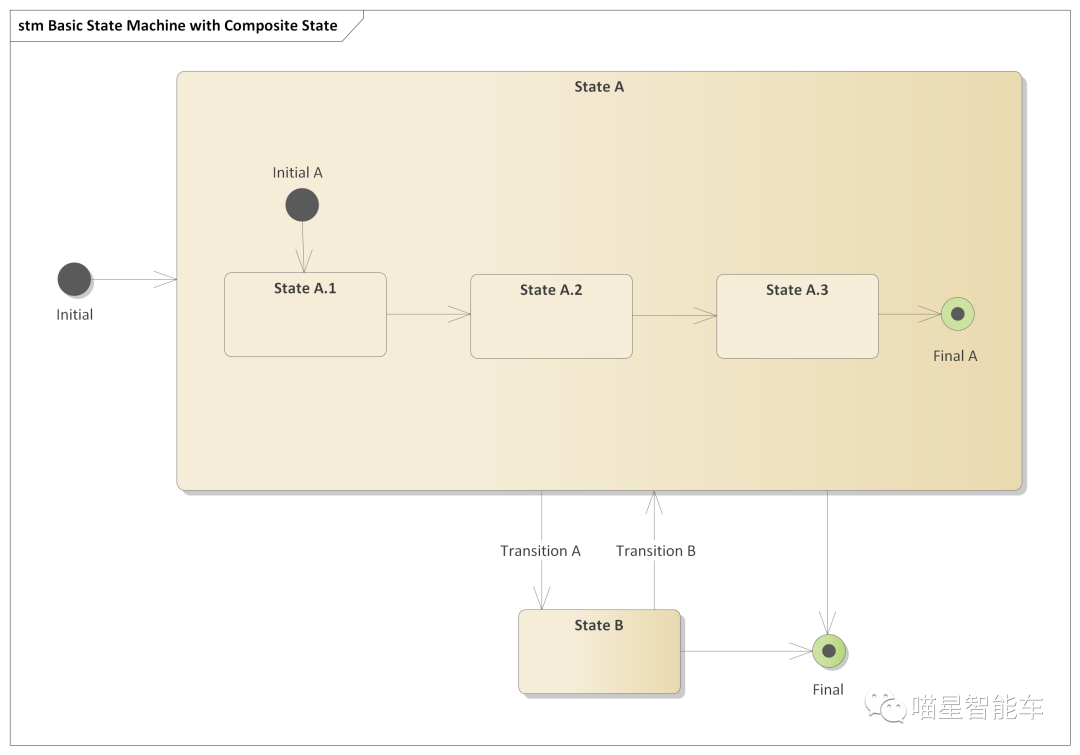
狀態(tài)
? 乘客狀態(tài):提供有關(guān)自主車輛每個乘客(包括駕駛員)狀態(tài)的描述。信息可能包括存在、注意力、情緒狀態(tài)、健康等。
--來自乘客監(jiān)控功能的有關(guān)駕駛員和乘客的信息。
--在汽車公司、自動駕駛系統(tǒng)支持級別和系統(tǒng)體系結(jié)構(gòu)之間有所不同。可能包括帶有相關(guān)狀態(tài)信息的乘客列表。
--將列出具有相關(guān)狀態(tài)標記的乘客。例如《乘客:成人,座位:0,角色:司機,注意力:向前,注視區(qū)域:(34,56,32),司機意圖:左轉(zhuǎn),健康:正常,情緒:正常,轉(zhuǎn)向:是等。
? 基于操作域監(jiān)督的路線約束:對路線進行約束以保持在操作設(shè)計域(ODD)內(nèi)。一個例子是由于缺乏路燈照明而在某些時間避免某些路線。
? 基于場景的路線約束:動態(tài)確定路線約束,如封路標志、高速公路上封閉的車道或用路障封閉的高速公路入口。
? 基于操作域監(jiān)督的機動約束:由于需要保持在操作域監(jiān)督內(nèi)而對機動施加約束。一個例子是避免超車,因為附近的車輛數(shù)量大于以當前速度可以可靠跟蹤的車輛數(shù)量。
? 基于場景的機動約束:動態(tài)檢測機動的約束。例如可能包括迎面而來的救護車、標有長載貨物牌的車輛、視野不佳等。
? 基于場景的運動約束:動態(tài)檢測車輛運動的約束。例如檢測到濕滑路面、劣化路面等,可能需要適當調(diào)整駕駛風格。
? 車輛運動約束:動態(tài)更新自主車輛運動的約束。提供外部執(zhí)行模塊的限制反饋,匯總后呈現(xiàn)給其他自動駕駛系統(tǒng)模塊,如軌跡規(guī)劃(路徑規(guī)劃)。
配置
? 用戶路線偏好:提供約束路線選擇的偏好或規(guī)則。可能包括乘車服務(wù)或自主車輛本身保持在操作設(shè)計域或優(yōu)化燃料消耗等的約束。首選路線引導(dǎo)與自動駕駛?cè)蝿?wù)相關(guān)。根據(jù)范式,路線偏好可以通過操作域監(jiān)督任務(wù)引導(dǎo)信號路徑反映當前操作域的限制。
? 地圖數(shù)據(jù):提供靜態(tài)的和可能的動態(tài)源地圖數(shù)據(jù),包括用于路徑規(guī)劃的路線圖,以及所謂的高清(HD)地圖。可能包括詳細的地理參照標志(包括道路標志、交通燈等的位置)。
--提供當前操作域的地理約束信息。--包括可被檢測/分類算法利用的來自靜態(tài)或動態(tài)更新地圖的先驗信息。例如,可包括期望的車道屬性、交通燈位置等。--提供地圖子系統(tǒng)關(guān)于道路和特征幾何及位置的信息,當與其他定位輸入組合時,可用于理解自主車輛的位置和方向(點云、特征位置和方向、道路幾何等)。
請求
? 操作域監(jiān)督任務(wù)請求:由于車輛使用條件改變或一個或多個未能保持在授權(quán)或當前操作域內(nèi)而請求修改當前任務(wù)。
? 互聯(lián)任務(wù)請求:由某個遠程服務(wù)請求設(shè)置/更改當前任務(wù)。一個例子是由于在車內(nèi)檢測到醫(yī)療緊急情況而更改目的地。來自連接服務(wù)的修改當前任務(wù)的請求。例如,乘車管理服務(wù)設(shè)置/覆蓋目的地,或由于交通擁堵或事故而建議繞行。
? HMI任務(wù)請求:由車輛乘員請求任務(wù)設(shè)置/更改;來自通過HMI注冊的車輛乘員的修改當前任務(wù)的請求。任務(wù)請求可能包括自動化水平的更改。
? 行為規(guī)劃任務(wù)請求:行為規(guī)劃(BP)請求修改任務(wù)。如果行為規(guī)劃(BP)確定無法按計劃執(zhí)行任務(wù),則可能需要這樣做。請求的性質(zhì)可以是請求人類駕駛員接管,例如。
? 自主車輛機動假設(shè):提供一個或多個假設(shè)的機動,系統(tǒng)可以為此預(yù)測一個或多個結(jié)果。
-
汽車電子
+關(guān)注
關(guān)注
3024文章
7869瀏覽量
166508 -
車輛
+關(guān)注
關(guān)注
0文章
81瀏覽量
15117 -
架構(gòu)
+關(guān)注
關(guān)注
1文章
509瀏覽量
25447 -
自動駕駛
+關(guān)注
關(guān)注
783文章
13684瀏覽量
166147
發(fā)布評論請先 登錄
相關(guān)推薦
如何設(shè)計自動駕駛系統(tǒng)的狀態(tài)機
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
自動駕駛真的會來嗎?
自動駕駛的到來
UWB主動定位系統(tǒng)在自動駕駛中的應(yīng)用實踐
如何讓自動駕駛更加安全?
自動駕駛汽車的處理能力怎么樣?
聯(lián)網(wǎng)安全接受度成自動駕駛的關(guān)鍵
自動駕駛OS市場的現(xiàn)狀及未來 精選資料推薦
自動駕駛系統(tǒng)設(shè)計及應(yīng)用的相關(guān)資料分享
自動駕駛技術(shù)的實現(xiàn)
自動駕駛線控底盤VCU功能介紹
自動駕駛算法軟件架構(gòu)介紹

自動駕駛基礎(chǔ)架構(gòu)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論