") 伺服系統(tǒng)的控制模型解析
伺服系統(tǒng)的控制模型解析
來源:小牛機(jī)器人
常見的伺服控制回路(矢量控制方式)如下圖所示,其中Clarke變換是從三相坐標(biāo)系A(chǔ)BC到兩相靜止 坐標(biāo)系的轉(zhuǎn)換,而Park變換是從靜止坐標(biāo)系到與轉(zhuǎn)子磁場(chǎng)同向的旋轉(zhuǎn)坐標(biāo)系的變換。其中 是實(shí)際位置反饋,n為速度,為轉(zhuǎn)矩電流、為實(shí)際勵(lì)磁電流。對(duì)于同步電機(jī)而言,勵(lì)磁的設(shè)定,而異步電機(jī)根據(jù)電機(jī)參數(shù)而定。通常情況下,電流控制器與速度控制器均為PI控制器,二者在驅(qū)動(dòng)器中設(shè)定;而位置環(huán)控制器為P控制器,在運(yùn)動(dòng)控制器中設(shè)定。
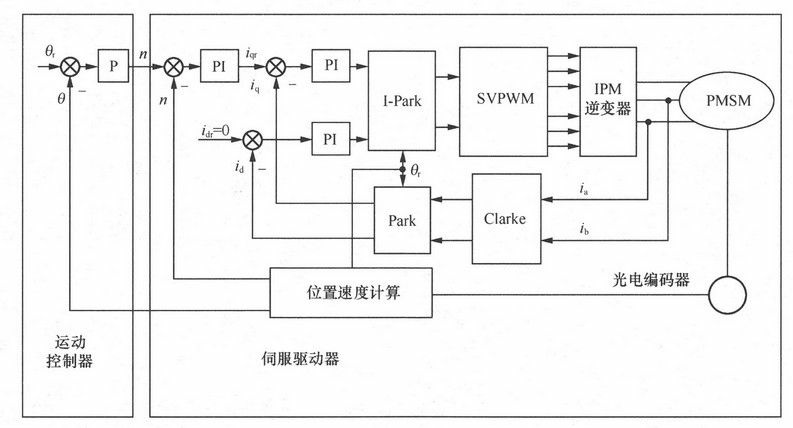
矢量控制結(jié)構(gòu)圖
從上圖可以看出,在運(yùn)動(dòng)控制器中完成位置環(huán)的運(yùn)算之后,輸出的結(jié)果被標(biāo)定為速度設(shè)定,通過通信或者脈沖的方式傳遞給驅(qū)動(dòng)器,在驅(qū)動(dòng)器中完成速度與電流控制。
伺服系統(tǒng)的控制模型
通常情況下,伺服系統(tǒng)中包括電流環(huán)、速度環(huán)以及位置環(huán),如下圖所示。其中電流環(huán)的等效傳遞函數(shù)為一階系統(tǒng)函數(shù),L為電機(jī)電樞電感,R為電機(jī)電樞阻抗。速度環(huán)的閉環(huán)傳遞函數(shù)為二階系統(tǒng)函數(shù),其中包括電機(jī)的一階慣性環(huán)節(jié),J為電機(jī)轉(zhuǎn)子的轉(zhuǎn)動(dòng)慣量,B為電機(jī)的阻尼。
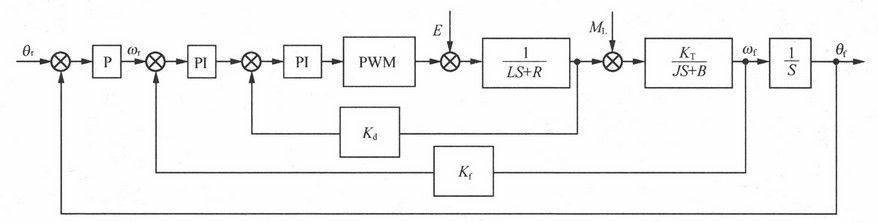
電機(jī)控制模型
通過電機(jī)的二階系統(tǒng)分析可以得出,電機(jī)的定子阻抗與電感對(duì)系統(tǒng)的電流控制影響比較大,因此在驅(qū)動(dòng)器中設(shè)定電機(jī)參數(shù)時(shí),定子線間阻抗與電感必須設(shè)置正確,否則會(huì)引起系統(tǒng)的過電流故障。另外,電機(jī)的轉(zhuǎn)動(dòng)慣量對(duì)速度的調(diào)整影響大,而電機(jī)的阻尼通常被忽略。
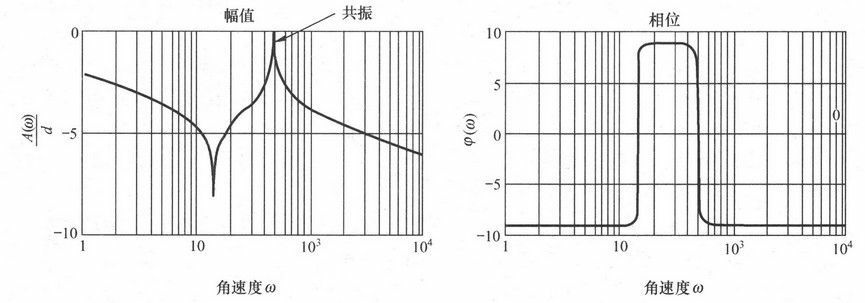
對(duì)于速度環(huán)構(gòu)成的二階系統(tǒng),電機(jī)與負(fù)載因素會(huì)影響其動(dòng)態(tài)性能,同時(shí)速度控制器的參數(shù)比例增益與積分時(shí)間也會(huì)影響二階系統(tǒng)的性能,增加比例增益會(huì)增加系統(tǒng)的帶寬,快速的積分會(huì)減小系統(tǒng)的靜態(tài)誤差,但是也會(huì)增加系統(tǒng)的阻尼。過小的阻尼會(huì)使二階系統(tǒng)在截止頻率處產(chǎn)生諧振,如下圖所示。對(duì)于二階系統(tǒng),理想的系統(tǒng)阻尼為0.707。
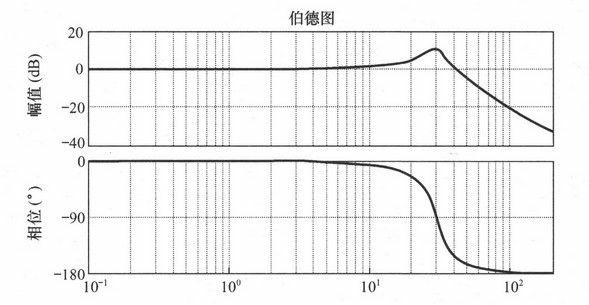
速度環(huán)伯德圖
以上控制回路沒有考慮負(fù)載對(duì)系統(tǒng)的影響,但在實(shí)際應(yīng)用中,負(fù)載對(duì)整個(gè)系統(tǒng)的模型有著不可忽視的影響。例如,在電機(jī)與負(fù)載之間有減速箱、聯(lián)軸器等機(jī)械傳動(dòng)設(shè)備時(shí),電機(jī)的模型不能簡(jiǎn)化為一個(gè)積分或者是慣性環(huán)節(jié),電機(jī)與負(fù)載以及中間連接器一起構(gòu)成二自由度振動(dòng)系統(tǒng),如下圖所示,其等效模型會(huì)疊加到速度環(huán)上,在系統(tǒng)的高頻范圍引起諧振。
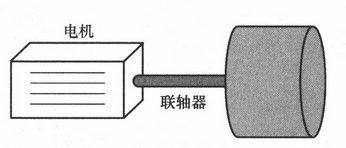
電機(jī)拖動(dòng)負(fù)載
根據(jù)上圖所示的機(jī)械結(jié)構(gòu),可以得到電機(jī)到負(fù)載的傳遞函數(shù)如下圖所示。
從電機(jī)到負(fù)載的伯德圖
如下圖所示,負(fù)載與電機(jī)的慣量比大小是諧振峰的影響因素,慣量比越大,諧振越嚴(yán)重;但慣量比越小,電機(jī)的驅(qū)動(dòng)能力都消耗到電機(jī)上,導(dǎo)致系統(tǒng)的效率太低。因此在選型與配置時(shí)要考慮此因素,保證負(fù)載與電機(jī)的慣量比在一個(gè)合適的范圍內(nèi)。實(shí)踐中認(rèn)為4∶1為最優(yōu)的配置。
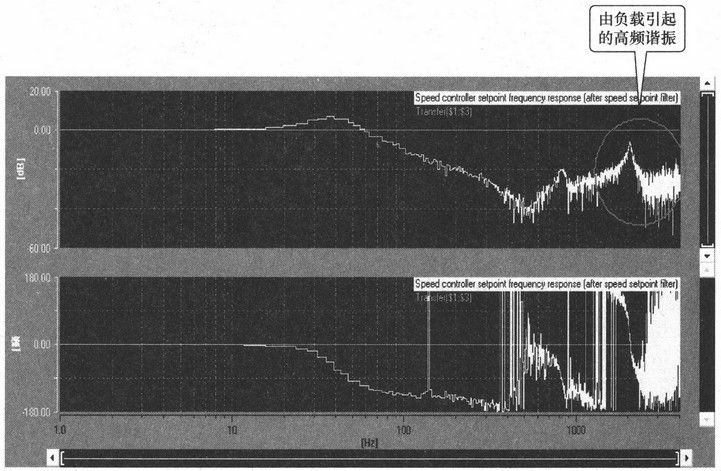
由負(fù)載引起的高頻諧振
審核編輯:湯梓紅
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
52文章
8154瀏覽量
145996 -
控制器
+關(guān)注
關(guān)注
112文章
16197瀏覽量
177395 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28191瀏覽量
206505 -
伺服系統(tǒng)
+關(guān)注
關(guān)注
14文章
561瀏覽量
39179 -
矢量控制
+關(guān)注
關(guān)注
2文章
284瀏覽量
32170
原文標(biāo)題:基于矢量控制的伺服控制、伺服系統(tǒng)的控制模型
文章出處:【微信號(hào):旺材伺服與運(yùn)動(dòng)控制,微信公眾號(hào):旺材伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
全數(shù)字永磁交流伺服系統(tǒng)的離散模型的研究
伺服系統(tǒng)的PID控制
伺服系統(tǒng)介紹

伺服系統(tǒng)脈沖控制電路
伺服系統(tǒng)的PID控制技術(shù)下載
伺服系統(tǒng)是什么_伺服系統(tǒng)的基本要求_伺服系統(tǒng)的基本組成
基于自抗擾控制的雙環(huán)伺服系統(tǒng)詳解
交流伺服系統(tǒng)的分類及應(yīng)用場(chǎng)合
伺服系統(tǒng)原理及分類






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論