 利用CMUT面陣進行非接觸式三維超聲反射成像
利用CMUT面陣進行非接觸式三維超聲反射成像
與傳統工藝制作的壓電塊體型超聲換能器相比,電容式微機械超聲換能器(CMUT)具有阻抗匹配特性良好、帶寬大、體積小等優勢,在醫學超聲成像和無損檢測方面得到了廣泛應用。三維超聲反射成像通常需要利用CMUT線陣的機械移動實現對被測物的多維度掃描,但這一方法往往難以實現較小距離的移動,并且存在一定的誤差。利用CMUT面陣對被測物進行掃描可以同時獲取多維度的超聲反射信號,從而減少測試工作量,并且能夠準確獲取被測物的三維信息。然而,目前國內關于利用CMUT面陣進行非接觸式三維超聲反射成像的研究鮮有報道。
據麥姆斯咨詢報道,為了解決上述挑戰,來自中北大學的研究人員提出了利用基于16 × 4陣元的CMUT面陣進行B模式及二次諧波三維成像測試的方法,以得到偽影水平更低、重建偏差更小的超聲反射圖像。相關研究成果以“基于16 × 4陣元CMUT面陣的三維超聲反射成像”為題發表在《微納電子技術》期刊上。
CMUT面陣的制備及工作原理
研究人員分別利用絕緣體上硅(SOI)和二氧化硅(SiO?)晶圓制備了CMUT振動薄膜和真空腔,并且在真空環境中通過晶圓鍵合形成CMUT面陣。
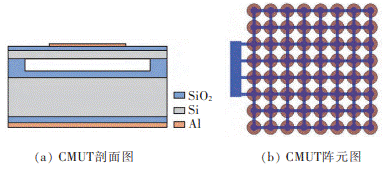
圖1 CMUT剖面圖及陣元圖
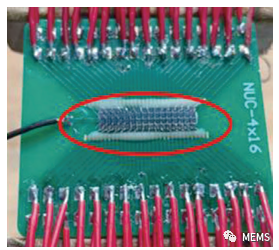
圖2 基于16 × 4陣元的CMUT面陣實物圖
CMUT的工作原理是通過在上、下電極之間施加直流偏壓,從而產生感應靜電力將頂部薄膜拉向底部電極。當CMUT處于發射模式時,將交流電壓信號疊加在直流偏壓上會激勵薄膜振動,實現電能和機械能的轉換,產生超聲信號;當CMUT處于接收模式時,在上、下電極之間施加直流偏壓,在超聲波的作用下,薄膜會產生振動,從而使得電容值發生改變,通過檢測這一變化即可實現超聲信號的接收。
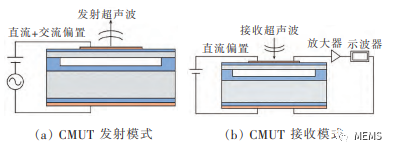
圖3 CMUT工作原理
仿真及實驗平臺搭建
該研究利用基于Matlab的k-Wave光聲仿真工具箱對基于16 × 4陣元的CMUT面陣進行超聲反射成像仿真。整個仿真區域介質為硅油,被測物為一塊長和寬均為3 cm、厚1 cm的鋁塊,鋁塊與CMUT的距離為3 cm,CMUT陣元間的距離為1 mm。此外,采用單個陣元發射、所有陣元接收,即一發多收的掃描方式對鋁塊進行掃描。
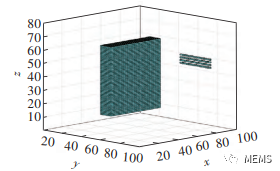
圖4 基于16 × 4陣元的CMUT面陣及被測鋁塊仿真模型
隨后,研究人員在仿真的基礎上搭建了基于16 × 4陣元的CMUT面陣的超聲反射成像測試系統。采用面陣上第二條線陣的單個陣元發射、所有陣元接收的方式進行實驗測試。實驗使用信號發生器和功率放大器驅動CMUT面陣發射超聲波,并且利用示波器觀察超聲反射信號波形。
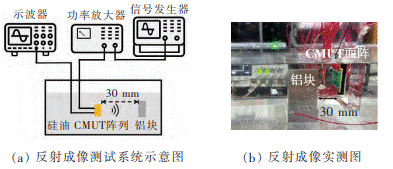
圖5 基于16 × 4陣元的CMUT面陣超聲反射成像測試系統示意圖及超聲反射成像實測圖
仿真及實驗結果
研究人員采用B模式及二次諧波兩種成像算法分別對被測鋁塊的超聲反射信號進行處理,以獲取其三維圖像及對應的二維切面。結果顯示,基于16 × 4陣元的CMUT面陣的反射成像系統能夠確定鋁塊的位置。此外,基于B模式成像算法和二次諧波成像算法所獲取的成像結果中,鋁塊與CMUT面陣的距離重建偏差分別為3.63%及1.47%。
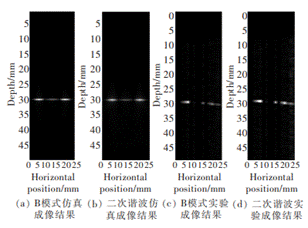
圖6 被測鋁塊二維反射成像結果
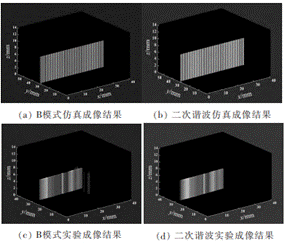
圖7 被測鋁塊三維反射成像結果
綜上所述,該研究搭建了基于16 × 4陣元的CMUT面陣的三維超聲反射成像系統,以獲得誤差小、信噪比高的超聲反射圖像。采用單個陣元發射、所有陣元接收的收發方式對鋁塊進行了相關測試與仿真,利用B模式及二次諧波成像算法對超聲回波信號進行處理,獲取了被測物的二維切面及三維圖像。仿真和實驗結果均可以較清晰地確定鋁塊的位置,與實際情況相符。
為了對比兩種算法的成像效果,研究人員計算了鋁塊與CMUT面陣的距離重建偏差。計算結果顯示,B模式及二次諧波成像算法的仿真距離重建偏差分別為0.63%和0.4%,實驗重建偏差分別為3.63%和1.47%,二次諧波圖像的距離重建偏差均小于B模式圖像的距離重建偏差。總之,該研究證明了所提出的基于16 × 4陣元的CMUT面陣的三維超聲反射系統可實現對被測物的三維成像。
審核編輯:劉清
-
示波器
+關注
關注
113文章
6203瀏覽量
184547 -
功率放大器
+關注
關注
102文章
3522瀏覽量
131677 -
晶圓
+關注
關注
52文章
4851瀏覽量
127816 -
信號發生器
+關注
關注
28文章
1456瀏覽量
108662 -
超聲換能器
+關注
關注
0文章
53瀏覽量
2887
原文標題:基于16 × 4陣元的CMUT面陣,實現高效率、高質量三維超聲反射成像
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
三維激光掃描儀的數據可視化技術
三維激光掃描儀應用領域 三維激光掃描儀與傳統測量工具比較
cad如何進行三維建模
泰來三維|三維激光掃描技術在古建筑保護中的應用

泰來三維| 三維掃描在汽車工廠生產改造中的應用
泰來三維|數字化工廠_煤礦三維掃描數字化解決方案

泰來三維|三維掃描服務_三維掃描助力園區改造公園


泰來三維|文物三維掃描,文物三維模型怎樣制作

簡述面結構光成像
泰來三維|見過三維掃描烏賊嗎?三維掃描助力仿生設計學研究
線陣相機與面陣相機的區別





 工商網監
工商網監
評論