") 機(jī)器視覺外觀瑕疵檢測原理詳解
機(jī)器視覺外觀瑕疵檢測原理詳解
瑕疵模式的原理
分割
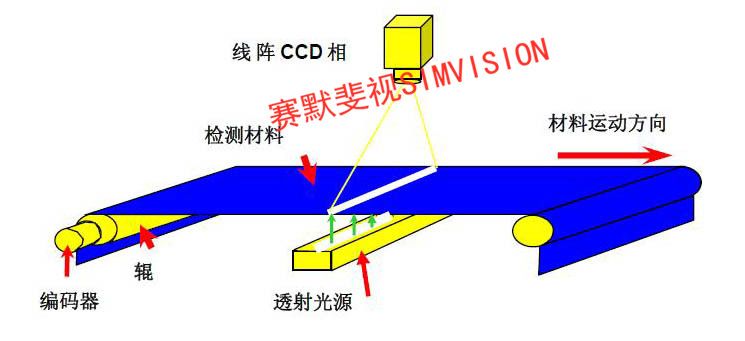
圖像傳感器利用攝像元件 CCD 的每個像素的濃度(明暗) 數(shù)據(jù),根據(jù)濃度的變化來檢測瑕疵或邊緣部。考慮到處理全部像素?cái)?shù)據(jù)所需時(shí)間過長,同時(shí)一些不必要的噪點(diǎn)數(shù)據(jù)會影響檢查的結(jié)果,因此在本公司生產(chǎn)的 CV 系列中,采用由數(shù)個像素構(gòu)成的小“分割”的平均濃度,通過與周圍的平均濃度進(jìn)行對比的方法來檢測瑕疵。

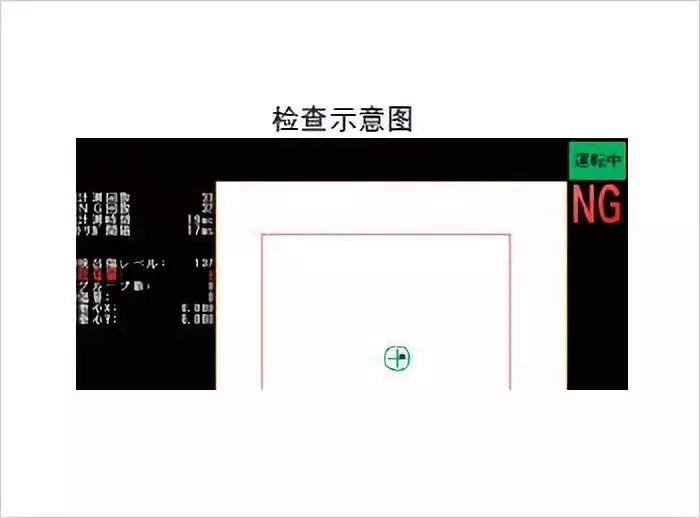
計(jì)算由四個像素構(gòu)成的分割的平均濃度,然后與周圍分割的平均濃度進(jìn)行比較。
上圖中,在紅線標(biāo)出的分割內(nèi)檢測到瑕疵。
瑕疵模式算法(各分割與周圍分割進(jìn)行比較和計(jì)算的方法)
下面介紹 CV 系列中瑕疵測量模式的算法。
檢測原理 (檢測方向?yàn)閄)
在檢測區(qū)域內(nèi),將任何尺寸的小區(qū)域(分割)移動其分割大小的 1/4 量的同時(shí),進(jìn)行平均濃度的測定。
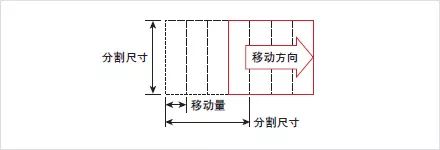
在包括當(dāng)前分割(右圖(1)95的位置))在內(nèi)的檢測方向4 分割中,測量最大濃度和最小濃度。該值就是當(dāng)前分割的"瑕疵等級"。

瑕疵等級超過了設(shè)定臨界值時(shí),將該當(dāng)前分割作為瑕疵進(jìn)行計(jì)數(shù)。該計(jì)數(shù)值則作為"傷量"檢查結(jié)果。

之后,在區(qū)域內(nèi)每次以一定的移動量移動當(dāng)前分割時(shí)重復(fù)以上(1)~(3)步驟。
指定檢測方向?yàn)閄Y(二維)時(shí)的處理方法

以XY為檢測方向時(shí),對于包括當(dāng)前分割在內(nèi)的 X、Y方向的各 4個分割(共計(jì)16個分割),計(jì)算最大濃度與最小濃度的差值。
通過比較周圍 4 個分割 (而不僅是相鄰 2 個分割) 的濃度,可以檢測出微小的濃度變化( 瑕疵)。
瑕疵模式的原理 總結(jié)
瑕疵模式,是借助“段”這種由幾個像素組成的小單位,與周圍進(jìn)行分段比較,將濃度變化點(diǎn)檢測為瑕疵或污點(diǎn)的模式。通過分段處理,可以在降低干擾影響的同時(shí)實(shí)現(xiàn)高速性,通過將多個候選項(xiàng)與周圍段進(jìn)行比較,可使過去難以實(shí)現(xiàn)的對“微小瑕疵”、“輕薄污點(diǎn)”等的檢測成為可能。
瑕疵模式的優(yōu)化設(shè)置方法
最佳分割尺寸
下面介紹瑕疵檢查的優(yōu)化設(shè)置方法。
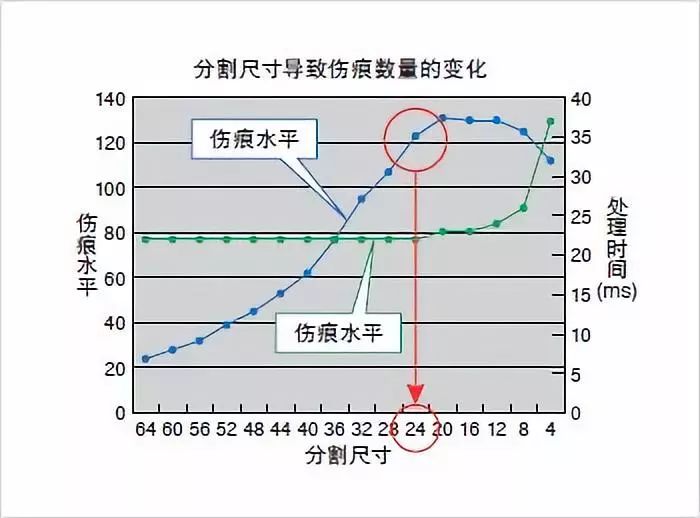
通過調(diào)整分割尺寸,可以優(yōu)化檢測敏感度及處理時(shí)間。
右表所示的試驗(yàn)結(jié)果表示的是分割尺寸不同時(shí),瑕疵水平與處理時(shí)間之間的變化關(guān)系(使用本公司生產(chǎn)的 CV-3000)。
分割尺寸與檢測對象的尺寸基本相同時(shí),瑕疵水平達(dá)到最大值。換言之,將分割尺寸設(shè)為實(shí)際檢測對象的尺寸是一種同時(shí)兼顧檢測敏感度與處理時(shí)間的設(shè)置。
最佳分割尺寸=瑕疵大小(mm)×Y方向像素?cái)?shù)量/Y方向視野(mm)
例如:瑕疵尺寸為 2mm、視野為120mm( 方形)、采用24萬像素照相機(jī)(Y方向 480像素)。
則:2×480÷120=分割尺寸8
適于圖像的分割移動量/ 比較間隔的設(shè)置
瑕疵模式的兩個參數(shù)——移動量及比較間隔可以決定進(jìn)行濃度比較時(shí)的分割移動距離。
通過調(diào)整這些參數(shù),可以更好地檢測“ 小尺寸瑕疵”、“ 顏色較淺的污跡”等有特點(diǎn)的瑕疵·污跡。
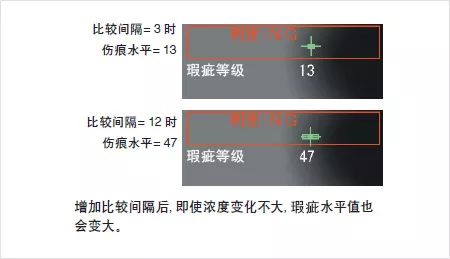
檢測小尺寸瑕疵時(shí),應(yīng)該將移動量及比較間隔均設(shè)為較小的值,以便進(jìn)行細(xì)致比較。
檢測顏色較淺的污跡時(shí),需要將移動量及比較間隔均設(shè)為較大的值,以便在更大的范圍內(nèi)進(jìn)行比較。
總之,為了得到良好的檢測效果,應(yīng)該根據(jù)瑕疵·污跡的種類進(jìn)行適當(dāng)?shù)脑O(shè)置。
瑕疵模式最佳設(shè)定方法 總結(jié)
通過調(diào)整最佳段大小和移動量/比較間隔設(shè)定,實(shí)現(xiàn)目標(biāo)物的檢測最佳化。最佳設(shè)定,就是將段大小設(shè)定為和瑕疵/污點(diǎn)同樣的大小,并根據(jù)瑕疵/污點(diǎn)的大小和濃度,設(shè)定移動量和比較間隔。
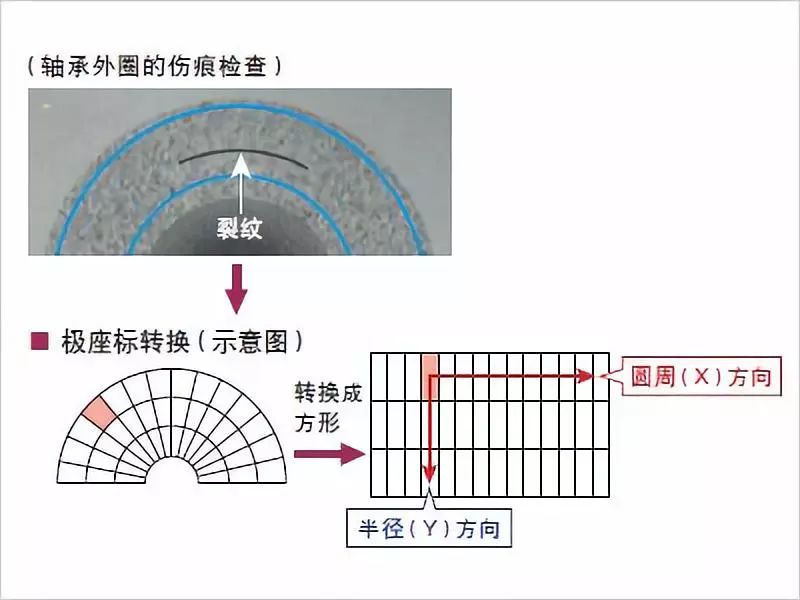
圓周方向瑕疵檢查的原理
對于 PET 瓶、軸承、O圈等圓形的工件,應(yīng)根據(jù)其曲線的外形制定適宜的外觀檢查方法。
這里,我們采用了利用程序進(jìn)行“極座標(biāo)轉(zhuǎn)換”的方法。
將圓弧形的窗口(檢查區(qū)域)轉(zhuǎn)換成方形,通過對比圓周及半徑方向上的分割濃度來檢測瑕疵。
外觀檢測/瑕疵模式 總結(jié)
要最大程度發(fā)揮瑕疵模式的作用,請牢記以下3點(diǎn)。
根據(jù)需要檢測的瑕疵大小,設(shè)定段大小
根據(jù)瑕疵的大小及濃度,設(shè)定移動量/比較間隔
根據(jù)工件的形狀,組合預(yù)處理設(shè)定
最后,對于視覺系統(tǒng)而言,拍攝清晰的圖像很重要。
來源:機(jī)器視覺沙龍
審核編輯:湯梓紅
-
CCD
+關(guān)注
關(guān)注
32文章
870瀏覽量
141863 -
圖像傳感器
+關(guān)注
關(guān)注
68文章
1827瀏覽量
129244 -
算法
+關(guān)注
關(guān)注
23文章
4552瀏覽量
92023 -
機(jī)器視覺
+關(guān)注
關(guān)注
161文章
4266瀏覽量
119546
原文標(biāo)題:【光電智造】機(jī)器視覺外觀瑕疵檢測基礎(chǔ)
文章出處:【微信號:今日光電,微信公眾號:今日光電】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
機(jī)器視覺系統(tǒng)應(yīng)用于標(biāo)簽外觀視覺檢查!
外觀檢測設(shè)備技術(shù)優(yōu)勢,外觀缺陷檢測原理解析
CCD機(jī)器視覺檢測定位系統(tǒng)在手機(jī)殼瑕疵檢測的應(yīng)用介紹
機(jī)器視覺檢測系統(tǒng)在薄膜表面缺陷檢測的應(yīng)用
紗布瑕疵缺陷機(jī)器視覺檢測的應(yīng)用
湖北機(jī)器視覺在紙張表面瑕疵檢測中的作用
四元數(shù)數(shù)控:深圳機(jī)器視覺檢測在彩盒外觀檢測上有什么應(yīng)用?
四元數(shù)數(shù)控:深圳CCD視覺檢測系統(tǒng)紙張表面瑕疵檢測是什么?
四元數(shù)數(shù)控:深圳CCD視覺檢測系統(tǒng)鋰電池外觀檢測有什么應(yīng)用?
機(jī)器視覺外觀缺陷檢測的性能特點(diǎn)介紹
基于機(jī)器視覺檢測技術(shù)的薄膜瑕疵檢測系統(tǒng)的原理介紹
SIMV薄膜瑕疵機(jī)器視覺檢測系統(tǒng)的優(yōu)勢是什么
機(jī)器視覺檢測系統(tǒng)為薄膜瑕疵檢測賦能
機(jī)器視覺檢測中的外觀缺陷檢測
基于機(jī)器視覺的PIN針外觀瑕疵檢測技術(shù)研究






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論