 機器視覺現在如何推動自動化的發展
機器視覺現在如何推動自動化的發展
作者:Jody Muelaner
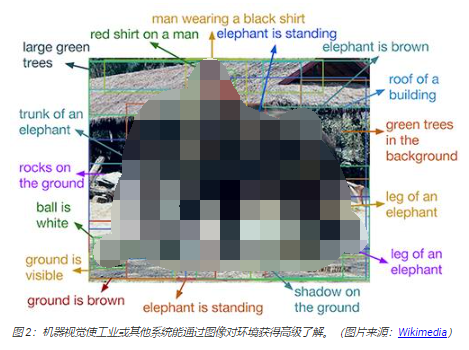
機器視覺是一系列技術的融合,可使工業或其他的自動化設備從圖像中獲得對當時環境的高級理解。如果沒有機器視覺軟件,具有不同色彩值和色調強度的數字圖像對于此類設備來說只不過是簡單的、無任何聯系的像素集合。機器視覺讓計算機(通常與機器控制器相連)檢測這類圖像中的邊緣和形狀,以使更高級別的處理程序識別出預先定義的目標物體。這種意義上的圖像并不局限于可見光譜中的攝影圖像;這類圖像也可以包括使用紅外、激光、X射線和超聲波信號獲得的圖像。
在工業環境中,相當常見的機器視覺應用從物料箱中雜亂放置的許多零件中識別出特定的零件。在這里,機器視覺有助于拾放機器人自動拾取正確的零件。當然,如果這些零件都以相同的方向整齊地排列在托盤上,那么用成像反饋來識別這些零件就相對簡單了。然而,功能強大的機器視覺算法可識別與攝像機有不同距離的物體(因此在成像傳感器上顯示為不同大小的圖像)以及與相機不同向的物體。
最復雜的機器視覺系統已經實現了遠比從物料箱揀選零件更復雜的新興設計,例如,可能沒有比自動駕駛汽車更復雜的識別了。
與機器視覺有關的技術
機器視覺這一術語有時被保留下來,以便參考那些能從圖像中提取信息的更成熟、更有效的數學方法。相比之下,計算機視覺一詞通常描述的是更現代、計算要求更高的系統——包括使用機器學習或人工智能
(AI) 的黑箱方法。然而,機器視覺也可作為一個包羅萬象的術語,包括從圖像中提取高級信息的所有方法;在這種情況下,計算機視覺描述了其基本的運行理論。
能從圖像中提取高級含義的技術比比皆是。在研究界,此類技術通常被認為不同于機器視覺。然而實際上,所有這些都是實現機器視覺的不同方式。..而且他們在許多情況下是重疊的。
數字圖像處理是數字信號處理的一種形式,涉及圖像增強、修復、編碼和壓縮。相比模擬圖像處理,其優點是最大限度地減小噪音和失真以及有眾多算法可用。最初的一種圖像增強是用來校正第一批月球表面的近距離圖像的。在此過程中,使用了攝影測量制圖以及噪聲濾波器,并針對成像攝像機對準月球表面所產生的幾何失真進行了修正。

數字圖像增強通常涉及增大對比度,還可能針對視角和鏡頭失真進行幾何校正。壓縮通常是通過將復雜信號近似為余弦函數組合來實現的——一種被稱為離散余弦變換
(DCT) 的傅里葉變換。JPEG 文件格式是 DCT 最常見的應用。圖像修復也可以使用傅里葉變換來消除噪音和模糊。
攝影測量學采用某種特征識別來從圖像中提取測量結果。當從不同位置獲得同一場景的多幅圖像時,這些測量結果可以包括 3D信息。最簡單的攝影測量系統采用比例尺測量圖像中兩點之間的距離。為此,通常需要在圖像中包含一個已知的參考比例。
特征檢測讓計算機識別圖像中的邊緣、拐角或點。這是攝影測量以及識別物體和運動所需的第一步。Blob
檢測可以識別出邊緣過于光滑而無法進行邊緣或拐角檢測的區域。
模式識別用于識別特定對象。在最簡單的情況下,這可能意味著需要在傳送帶上找到一個定義明確的特定機械部件。
3D 重構確定來自 2D 圖像物體的 3D形態。這種功能可通過攝影測量方法來實現。其中,共同特征的高度(在不同觀測點的圖像中確定)采用三角測量來確定。單純使用 2D 圖像進行 3D重構也是可能的;在此,軟件也解釋了邊緣或陰影區域之間的幾何關系。
人類可以在大腦中利用線描畫法加工簡單地重構出立方體——利用陰影圓重構出球體。陰影顯示了表面的坡度。然而,這種推導過程遠比想象中復雜的多,因為陰影是一維參數,而坡度則發生在二維情況下。這可能導致模棱兩可的情況——這是由描繪物理上不可能的物體的藝術驗證了的事實。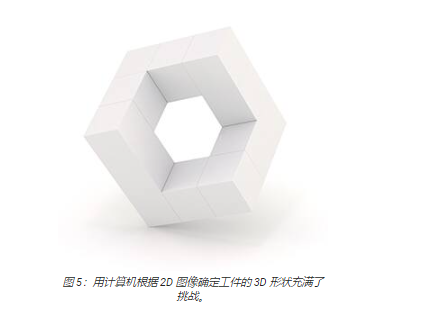
機器視覺任務是如何排序的
通過從低級操作開始,然后逐步推進到高級操作,許多機器視覺系統都逐步地結合了上述技術。在最低級別下,圖像的所有像素都作為高帶寬數據保存。然后,序列中的每個操作都能識別圖像特征,并以相對較少的數據量來表示所關注的信息。
首先是圖像增強和修復的低級操作,其次是特征檢測。因此在使用多傳感器的情況下,可由專門針對單獨傳感器的分布式進程來執行低級操作。一旦在單獨圖像中檢測到特征,就可進行更高級的攝影測量——正如任何物體識別或其他依靠來自多個圖像和傳感器的組合數據的任務一樣。
直接計算和學習算法
在機器視覺情況下,直接計算是一組由程序員定義的數學函數。這些函數接受諸如圖像像素值之類的輸入,產生諸如物體邊緣坐標之類的輸出。相比之下,學習算法不是由人類直接編寫的,而是通過將輸入與期望的輸出相關聯的實例數據集進行訓練的。因此,學習算法作為黑盒子使用。現在大多數此類機器學習都采用了基于人工神經網絡的深度學習來進行計算。

如果基于直接計算,工業應用的簡單機器學習往往更可靠,計算要求也更低。當然,通過直接計算所能達到的效果是有限的。例如,永遠不要希望執行人臉來識別所需的高級識別模式,特別是不要希望從擁擠公共空間的視頻資料中進行識別。相比之下,機器學習能巧妙地處理此類應用。因此,機器學習越來越多地被部署到低級機器視覺操作中就不足為奇了,具體包括圖像增強、修復和特征檢測。
改進教學方法(不是算法)
深度學習技術的日趨成熟讓人發現,需要改進的不是學習算法本身,而是算法的訓練方式。一種經過改進的訓練程序被稱為以數據為中心的計算機視覺。在這里,深度學習系統接受由數千、數百萬、甚至數十億張圖像組成的非常強大的訓練集——然后保存通過其算法從每張圖像中提取的合成信息。這些算法通過工作實例聯系來實現有效學習,然后參考“答案書”來驗證是否得出了正確數值。
有一個關于數字模式識別的老故事具有警醒作用。美國軍方曾經打算利用機器視覺進行目標識別,國防承包商的演示可靠地識別出了美制和俄制坦克。各種不同的坦克都能從供應商的航拍照片中一輛接一輛地正確區分出來。但是,當用五角大樓自己的圖片庫再次測試時,該系統卻不斷地給出錯誤的答案。問題是,國防承包商的圖片都描繪了沙漠中的美國坦克和綠地上的俄羅斯坦克。該系統沒有識別出不同的坦克,反而識別出了不同顏色的背景。識別標準是什么呢?學習算法需要有精心策劃的訓練數據才能發揮作用。
結論:機器人工作單元的安全愿景
機器視覺不再是一項利基技術。在目前開來,工業領域是機器視覺部署增長最大的領域。在該領域,最引人注目的發展是目前機器視覺如何完善工業工廠的安全系統,即當工人在沒有佩戴安全帽、防護面具或其他合適的防護用品的情況下進入工作區時,該系統會發出警報或發出語音通知。機器視覺還可用于當叉車等移動機械離人員太近時發出警示的系統。
這些和類似的機器視覺系統有時可以取代工業機器人周圍的硬防護措施,以使操作更有效。機器視覺系統還可以取代或加強基于燈光防護的安全系統,這些安全系統只要發現工人進入工作單元就會停止機械運行。當機器視覺監測到工作單元周圍的工廠地面時,該單元中的機器人有可能在人員靠近時逐漸減速。
隨著工業環境設計的發展,以適應協作機器人和其他工作單元設備,使工廠人員可以安全地走動(甚至在設備運行時),這些和其他基于機器視覺的系統會成為工廠流程中更常見的一部分。
-
算法
+關注
關注
23文章
4599瀏覽量
92643 -
機器視覺
+關注
關注
161文章
4345瀏覽量
120111 -
自動化
+關注
關注
29文章
5512瀏覽量
79106 -
深度學習
+關注
關注
73文章
5492瀏覽量
120978
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論