") 什么是有感?什么是無感?無刷直流電機(jī)的有感和無感的區(qū)別
什么是有感?什么是無感?無刷直流電機(jī)的有感和無感的區(qū)別
什么是有感?
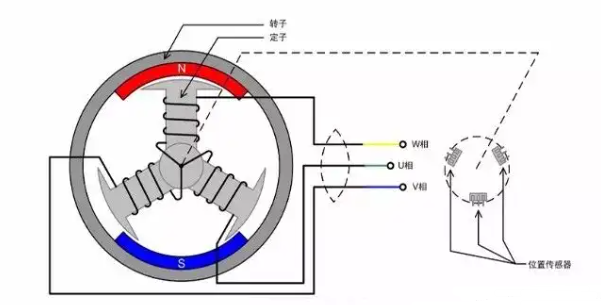
在有感無刷中的有感是指“霍爾傳感器”,那么什么是“霍爾”呢?霍爾是指的霍爾效應(yīng),這一現(xiàn)象是美國物理學(xué)家霍爾(A.H.Hall,1855—1938)于1879年在研究金屬的導(dǎo)電機(jī)構(gòu)時(shí)發(fā)現(xiàn)的。當(dāng)電流垂直于外磁場(chǎng)通過導(dǎo)體時(shí),在導(dǎo)體的垂直于磁場(chǎng)和電流方向的兩個(gè)端面之間會(huì)出現(xiàn)電勢(shì)差,這一現(xiàn)象便是霍爾效應(yīng)。這個(gè)電勢(shì)差也被叫做霍爾電勢(shì)差。簡(jiǎn)單來說,就是通過霍爾傳感器,無刷驅(qū)動(dòng)器可以明確知道無刷電機(jī)的轉(zhuǎn)子的位置。
什么是無感?
在無感無刷中的無感是指“無霍爾傳感器”,在沒有直接反饋的情況下,無感無刷電機(jī)只能通過間接方式獲取電機(jī)轉(zhuǎn)子位置,常見的方法有反電動(dòng)勢(shì)法、電感法、磁鏈法、高頻脈沖法及其它智能方法,應(yīng)用最多的是反電動(dòng)勢(shì)法。
無感無刷電機(jī)在啟動(dòng)時(shí)因?yàn)椴恢擂D(zhuǎn)子磁極方位,只能隨機(jī)變換電流去驅(qū)動(dòng)電機(jī),相似于“蒙”,總有一個(gè)時(shí)分轉(zhuǎn)子會(huì)滾動(dòng)起來,而轉(zhuǎn)子滾動(dòng)起來之后,就能靠線圈上的電流改變來核算轉(zhuǎn)子的方位,然后操控電流與方向。這就是為什么無感無刷在起步時(shí),總是有“咔咔咔"的癥狀。
與有感無刷則不同,有了傳感器,驅(qū)動(dòng)器從一開機(jī)就知道轉(zhuǎn)子磁極方位,直接就能給對(duì)應(yīng)的線圈供給對(duì)應(yīng)的電流,以驅(qū)動(dòng)轉(zhuǎn)子。可是電流很小時(shí),電機(jī)就會(huì)發(fā)出持續(xù)的"吱吱吱"的聲響。這就是為什么有感電機(jī)在低速時(shí)會(huì)聽到持續(xù)地"吱吱吱"的聲響,而無感無刷則不會(huì)。
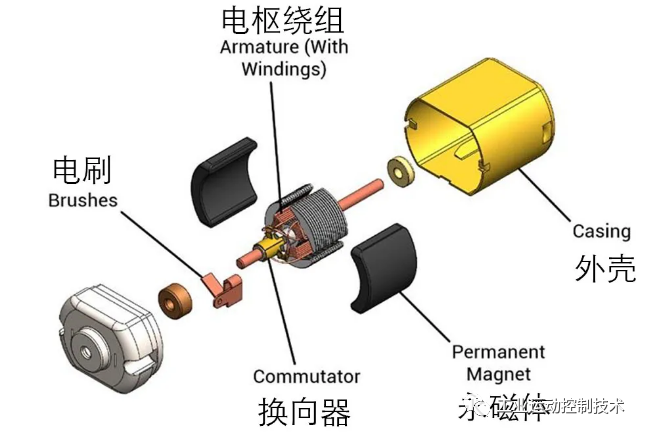
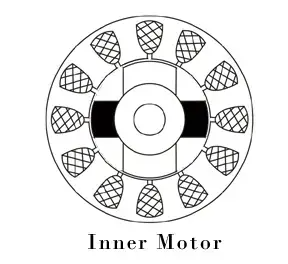
內(nèi)部結(jié)構(gòu)圖
有感無刷的優(yōu)缺點(diǎn)
優(yōu)點(diǎn):電機(jī)的線性更佳,速度穩(wěn)定性強(qiáng),響應(yīng)性高。
缺點(diǎn):造價(jià)高,且不容易做防水。受霍爾傳感器局限,容易受到干擾,讓驅(qū)動(dòng)器接收到錯(cuò)誤信息而導(dǎo)致故障,故而驅(qū)動(dòng)器到電機(jī)的線長限制一般在5米以內(nèi)。
無感無刷的優(yōu)缺點(diǎn)
優(yōu)點(diǎn):沒有傳感器,成本更低,線長不因霍爾因素影響而受到限制。
缺點(diǎn):線性不如有感無刷電機(jī),另外在市面上的驅(qū)動(dòng)器因?yàn)檗D(zhuǎn)速?zèng)]有準(zhǔn)確的反饋,誤差會(huì)在±20轉(zhuǎn)以上。帶載、滿載啟動(dòng)容易抖動(dòng)或啟動(dòng)失敗。
有刷電機(jī)與無刷電機(jī)調(diào)速方式的區(qū)別
實(shí)際上兩種電機(jī)的控制都是調(diào)壓,只是由于無刷直流采用了電子換向,所以要有數(shù)字控制才可以實(shí)現(xiàn)了,而有刷直流是通過碳刷換向的,利用可控硅等傳統(tǒng)模擬電路都可以控制,比較簡(jiǎn)單。
1、有刷馬達(dá)調(diào)速過程是調(diào)整馬達(dá)供電電源電壓的高低。調(diào)整后的電壓電流通過整流子及電刷地轉(zhuǎn)換,改變電極產(chǎn)生的磁場(chǎng)強(qiáng)弱,達(dá)到改變轉(zhuǎn)速的目的。這一過程被稱之為變壓調(diào)速。
2、無刷馬達(dá)調(diào)速過程是馬達(dá)的供電電源的電壓不變,改變電調(diào)的控制信號(hào),通過微處理器再改變大功率MOS管的開關(guān)速率,來實(shí)現(xiàn)轉(zhuǎn)速的改變。這一過程被稱之為變頻調(diào)速。
-
傳感器
+關(guān)注
關(guān)注
2548文章
50678瀏覽量
752018 -
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1708瀏覽量
70080 -
電機(jī)
+關(guān)注
關(guān)注
142文章
8933瀏覽量
145098
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
無刷直流電機(jī)的工作原理及應(yīng)用
無刷直流電機(jī)是什么?它有什么特點(diǎn)?
利用無刷直流電機(jī)簡(jiǎn)化傳感器式電機(jī)控制

使用霍爾效應(yīng)傳感器的無刷直流電機(jī)換向應(yīng)用說明
無刷直流電機(jī)測(cè)量好壞的方法有哪些
無刷直流電機(jī)矢量控制技術(shù)詳解
永磁無刷直流電機(jī)的控制方法
淺析基于CW32的無刷直流空心杯電機(jī)有感控制驅(qū)動(dòng)方案
用STM32控制步進(jìn)電機(jī)與無刷直流電機(jī)的區(qū)別是什么?
無感FOC無刷直流電機(jī)全集成驅(qū)動(dòng)芯片-XM2619產(chǎn)品概述
無刷直流電機(jī)驅(qū)動(dòng)單元

無刷直流電機(jī)(BLDC)運(yùn)轉(zhuǎn)工作原理圖
主流的無刷直流電機(jī)的控制方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論