") slamware自主定位導(dǎo)航解決方案賦能機(jī)器人智能移動(dòng)
slamware自主定位導(dǎo)航解決方案賦能機(jī)器人智能移動(dòng)
上篇,小嵐為大家介紹了slamware自主定位導(dǎo)航解決方案在移動(dòng)生態(tài)、開發(fā)便利性、智能性上探索的成果,那背后到底是哪些關(guān)鍵技術(shù)在賦能呢?
機(jī)器人在未知場(chǎng)景中,要想實(shí)現(xiàn)類人般的智能移動(dòng),必須要具備地圖構(gòu)建及導(dǎo)航能力。地圖的好壞,直接影響機(jī)器人在環(huán)境中的定位和導(dǎo)航能力 。
為了幫助機(jī)器人適應(yīng)多種應(yīng)用環(huán)境,思嵐優(yōu)化了軟件算法、強(qiáng)化了建圖引擎,讓機(jī)器人在復(fù)雜、大面積的場(chǎng)景下也能輕松應(yīng)對(duì),穩(wěn)定發(fā)揮,完成定位導(dǎo)航任務(wù)。
1、 最大25萬㎡+大場(chǎng)景穩(wěn)定建圖和更新
2、 復(fù)雜場(chǎng)景下的融合定位技術(shù)
3、 多傳感器融合數(shù)據(jù)接入、處理
4、 內(nèi)置異常處理與故障恢復(fù)機(jī)制
5、 完整的工具鏈支持
6、 豐富的開發(fā)生態(tài)和軟件支持
最大25萬㎡+大場(chǎng)景穩(wěn)定建圖和更新
主動(dòng)回環(huán)閉合糾正,超大場(chǎng)景建圖
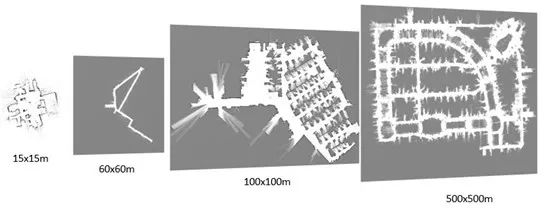
得益于SharpEdge圖優(yōu)化建圖技術(shù),思嵐科技的slamware算法能幫助機(jī)器人實(shí)現(xiàn)最大25萬㎡的地圖構(gòu)建能力,同時(shí)擁有主動(dòng)式回環(huán)閉合糾正能力,能很好的消除長(zhǎng)時(shí)間運(yùn)行導(dǎo)致的里程累計(jì)誤差。
▲自動(dòng)回環(huán)閉合糾正
分區(qū)建圖,地圖更新效率高
面對(duì)超大場(chǎng)景建圖,slamware還擁有分區(qū)建圖和更新地圖功能,如果遇到局部區(qū)域地圖信息變化,不用重新整體建圖,通過SDK接口即可以實(shí)現(xiàn)地圖更新,更好提升運(yùn)行階段的部署運(yùn)維效率。
復(fù)雜場(chǎng)景下的融合定位技術(shù)
機(jī)器人在工作過程中,如下復(fù)雜場(chǎng)景會(huì)經(jīng)常遇到:
· 相似和長(zhǎng)直走廊,環(huán)境特征少
· 機(jī)器人輪子打滑場(chǎng)景
· 局部環(huán)境變化大,人流量大
· ……
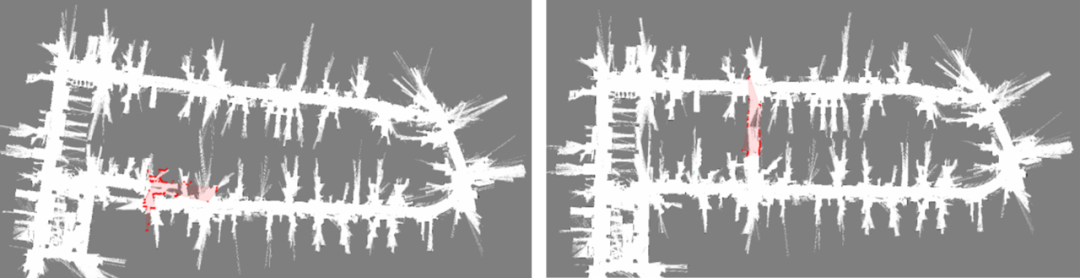
slamware自主定位導(dǎo)航解決方案基于IMU、輪速里程計(jì)、Lidar和視覺的多源融合定位系統(tǒng),支持高分辨率地圖的實(shí)時(shí)定位,面對(duì)復(fù)雜場(chǎng)景,擁有多傳感器融合技術(shù)、打滑檢測(cè)技術(shù)、全局重定位技術(shù)、定位異常檢測(cè)等技術(shù),實(shí)現(xiàn)復(fù)雜場(chǎng)景下室內(nèi)定位誤差<1%,全局重定位成功率>80%。
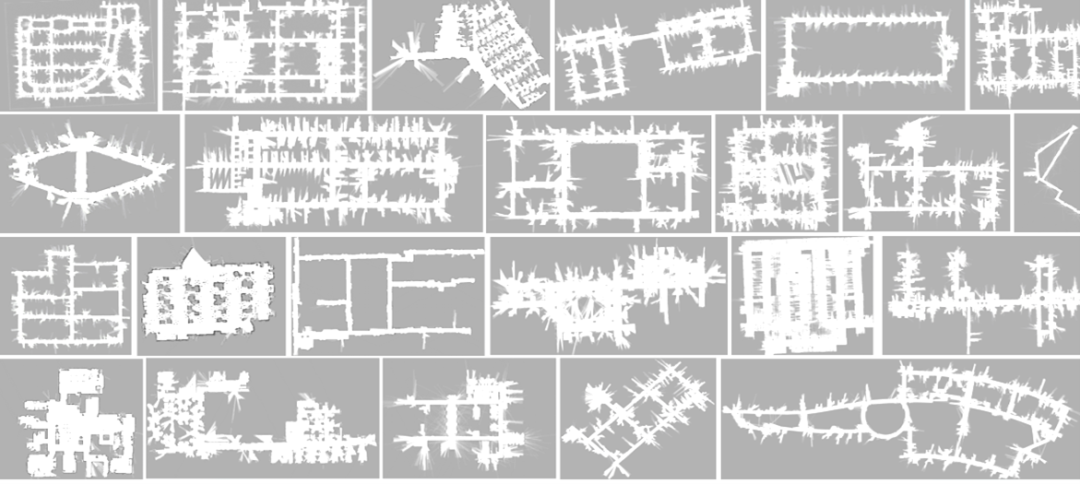
▲ 思嵐slamware建圖技術(shù),無懼復(fù)雜場(chǎng)景
多傳感器融合數(shù)據(jù)接入、處理
激光雷達(dá)作為機(jī)器人的“眼睛”,不僅可以直接獲取周圍環(huán)境、尺度信息,而且數(shù)據(jù)量小,適合后期SLAM,所以激光SLAM是目前行業(yè)內(nèi)最流行的導(dǎo)航方式。思嵐科技的slamware除了支持激光雷達(dá)傳感器外,還支持市面上常用的傳感器數(shù)據(jù)接入,多傳感器融合導(dǎo)航方案,保障障礙物正確高效感知。
插入:多傳感器導(dǎo)航
除此之外,還提供多種導(dǎo)航方式,如自由導(dǎo)航和軌道模式,讓部署更輕松~
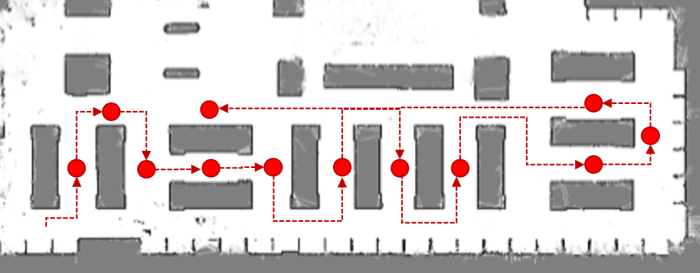
▲ 軌道模式自動(dòng)規(guī)劃路徑遍歷各掃描關(guān)鍵點(diǎn)
內(nèi)置異常處理與故障恢復(fù)機(jī)制
為了實(shí)時(shí)掌握機(jī)器人的狀態(tài),也為了保障機(jī)器人平穩(wěn)運(yùn)行,slamware內(nèi)置異常處理與故障恢復(fù)機(jī)制,精準(zhǔn)定位機(jī)器人運(yùn)行過程中的傳感器和狀態(tài)錯(cuò)誤,保證機(jī)器人運(yùn)行的安全性和高效性。

▲遠(yuǎn)程視頻實(shí)時(shí)監(jiān)控、異常狀態(tài)記錄時(shí)間戳
完整的工具鏈支持
1、提供PC端和移動(dòng)端的可視化工具Robostudio,可實(shí)現(xiàn):
- 對(duì)機(jī)器人的實(shí)時(shí)控制,及機(jī)器人運(yùn)動(dòng)狀態(tài)的可視化;
- 場(chǎng)景化地圖的構(gòu)建,及導(dǎo)航和語義元素的部署;
- 集成離線建圖、地圖融合和地圖優(yōu)化工具,提高地圖構(gòu)建的效率;
- 提供log的實(shí)時(shí)顯示界面,以及提供獲取機(jī)器人歷史運(yùn)行狀態(tài)備份的功能;
- 提供部署操作指南,常見問題說明,異常提示及處理建議,提升運(yùn)維效率。
2、提供基于云端的遠(yuǎn)程部署和運(yùn)維工具。
3、提供完備的SDK工具包,包括:
- ROS SDK工具;
- 基于Restful API的SDK工具;
- 完善的文檔說明及示例代碼,幫助客戶加速業(yè)務(wù)落地。
豐富的開發(fā)生態(tài)和軟件支持
除了完整的工具鏈支持,Slamware還擁有豐富的開發(fā)生態(tài)和軟件支持,讓客戶擁有良好的開發(fā)和產(chǎn)品體驗(yàn),無后顧之憂。
思嵐科技作為一家致力于提供機(jī)器人自主定位導(dǎo)航解決方案并致力于不斷對(duì)其進(jìn)行革新和普及的技術(shù)型公司,slamware自主定位導(dǎo)航解決方案不管是在產(chǎn)品形態(tài),還是技術(shù)實(shí)現(xiàn)上,都?xì)v經(jīng)了幾代的產(chǎn)品更迭和升級(jí)。對(duì)技術(shù)的盤點(diǎn),不僅僅是對(duì)技術(shù)的回顧,更是對(duì)未來的期許和重新定義、重新出發(fā)。
那么,在進(jìn)入下一個(gè)十周年之際,slamware自主定位導(dǎo)航解決方案將會(huì)迎來什么新的變化發(fā)展和挑戰(zhàn)呢?跟小嵐一起拭目以待吧!
審核編輯:彭菁
-
傳感器
+關(guān)注
關(guān)注
2548文章
50667瀏覽量
751947 -
機(jī)器人
+關(guān)注
關(guān)注
210文章
28192瀏覽量
206506 -
SDK
+關(guān)注
關(guān)注
3文章
1026瀏覽量
45778 -
軟件算法
+關(guān)注
關(guān)注
1文章
6瀏覽量
6769 -
思嵐科技
+關(guān)注
關(guān)注
2文章
75瀏覽量
5192
原文標(biāo)題:高性能SLAMWARE自主定位導(dǎo)航解決方案,賦能機(jī)器人智能移動(dòng)
文章出處:【微信號(hào):slamtec-sh,微信公眾號(hào):思嵐科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論