 稱重傳感器如何工作 稱重傳感器使用
稱重傳感器如何工作 稱重傳感器使用
從電子秤到工業稱重器,傳感器和電子設備都需要在許多領域測量物體的重量。
當我們談論測量物體的重量時,是指由于地球重力(重力)的作用而對物體施加在檢測系統上的力的檢測。這就是為什么在物理學中區分重量和質量的原因,因為后者是身體的一致性,而重量是對質量以重力加速度施加的力的形式傳遞的感知。質量和重量與重力加速度有關,這并非巧合,重力加速度平均為9.81 m /s2。從這個論述中可以得出結論,測量體重意味著檢測到一種力量,這并非偶然,我們稱其為力量重量。由于我們是電子設備,因此我們主要對電子稱重設備感興趣,其中有壓力傳感器。
稱重傳感器是一種用于測量重量并因此測量壓縮和牽引力的設備。
稱重傳感器如何工作
當以特定方式對其施加力時,稱重傳感器會產生與該力本身成比例的輸出信號。但是它如何產生這個信號呢?好吧,該設備基于稱為應變儀的組件,該組件通過利用壓阻效應來工作,即某些導電材料在沿某些方向壓縮或擴展時必須改變其電阻率的趨勢。這種現象類似于在石英和某些合成陶瓷材料中發生的壓電效應,在壓電材料中,牽引力或壓縮力會在兩個相對的面之間產生電勢差。
應變計(應變計)稱重傳感器由一個彈性元件組成,該彈性元件被選擇性地削弱以產生相對較高的電壓區域。應變儀被應用在這些區域。它們以各種配置連接,盡管最受贊賞的是惠斯通電橋,由四個如圖1所示布置的應變儀形成。在某些情況下,應變儀是兩個,其他兩個元件是公共電阻。應變儀也可以布置成半橋,在這種情況下,我們說的是半電池。
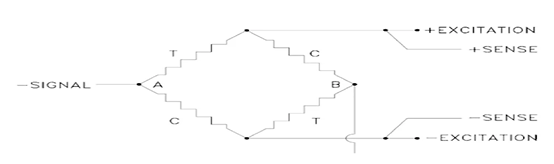
惠斯通電橋通過連續且穩定的激勵電壓在上,下節點(+/-激勵點)之間供電,而輸出信號則在電橋的水平節點之間汲取。由于惠斯通電橋基本上是一個雙電阻分壓器,可從中獲取接地引起的輸出電勢,因此產生的電壓就是它們之間的差。在圖1的圖中,輸出位于A和B之間。
在沒有施加到單元的任何負載的情況下,所有應變儀都具有相同的電阻,因此點A和點B之間的電勢沒有差異。
當將負載施加到電池時,電壓指示器的電阻增加,而壓縮指示器的電阻減小,因此電橋變得不平衡,并且存在與施加的載荷成比例的電勢差,可以通過點A進行測量和B。
一些稱重傳感器和指示器具有檢測電纜,在前面的圖1中將其稱為+和– SENSE,它們使指示器能夠測量和調整施加到傳感器上的激勵電壓。當放置電池時必須用長電纜連接時,這一點尤為重要。
稱重傳感器可以單獨使用,也可以組合使用,具體取決于要稱量的物體的幾何形狀。
圖2示出了典型的金屬應變儀,其由刻在平行網格線上的金屬箔組成,該金屬箔形成由出口焊盤界定的電路。箔片被接合到,這反過來,被約束到所述負載單元的表面的絕緣載體材料,因為它出現在圖2中。

圖2
在應變式稱重傳感器中,通常將稱重傳感器的一端連接到剛性結構上,而另一端則施加到負載接收設備上,通過該負載接收設備施加要測量的負載或力。在這種情況下,它是一個雙點像元,我們可以將其同化為懸臂梁,一端卡住,另一端受力。這種稱重傳感器以其簡單性和低成本而最為普遍。該結構通常是雙目的,即具有兩個孔的光束。應變儀安裝在頂部和底部,以測量拉伸力和壓縮力。由于應變儀可能會損壞,因此通常會用橡膠波紋管將其覆蓋并進行維修。橫梁本身通常由鍍鎳鋼合金制成。對于輕載(最大230克),該射束采用銅鈹合金制成,而對于較高載荷,則采用不銹鋼制成。
在圖3中,我們看到了一個梁式稱重傳感器,其中顯示了四個可用的應變儀,標記為T和C,并交叉布置在弱化的金屬結構的兩個表面上,以利于變形。使用所示的布置,兩個應變儀測量拉應力,兩個應變儀檢測壓應力,這與將載荷(重量)施加到稱重傳感器上時的情況完全相同。應變計為四個,連接在一起形成惠斯通電橋,如圖1所示。,但是在這種情況下,他們的安排是為了使他們相互協作,否則,一個方面的阻力變化會與另一個方面形成對比。協作意味著兩個T在橋中彼此相對,從而在施加力時獲得不平衡。
在惠斯通電橋的相對角上施加穩定的激勵電壓,并在其他點A和B上測量信號。
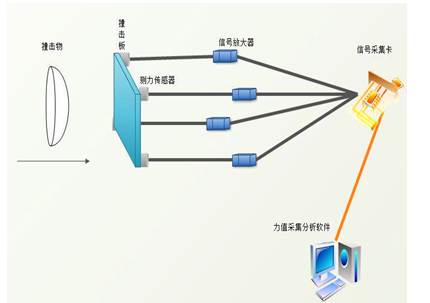
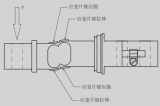
除了圖3中提出的用于剪切的類型之外,還有圖4中所示的用于牽引(張力傳感器)的類型,例如用于稱重容器和料斗的地方單元懸掛在空中結構上,待稱重的物體從下側懸掛。該結構實際上是S形,廣泛用于機械標尺到機電標尺的轉換。在這種情況下,電池用于檢測將杠桿系統連接到輻條的桿的電壓。

圖3
圖4
這類電池的典型容量范圍為45公斤至22噸,而橫梁的容量約為500克至數十公斤
然后是單點稱重傳感器(圖5),它們被廣泛用于平臺秤。無論負載在何處施加在上部平臺上,它們都會檢測重量。容量通常在1千克到2噸之間,可以容納表面積為幾百cm 2的平臺。

圖5
稱重傳感器的類型
可以根據力的施加方向對測力傳感器進行分類,因此我們可以選擇拉伸,壓縮,交替和彎曲的類型(圖6):第一種通常為S形,第二種通常為S形。紐扣或發條盒;第三個是在牽引力和壓縮力上都起作用,第四個是梁。
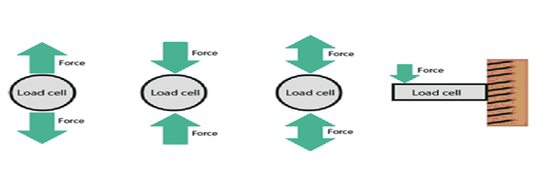
圖6
還有測量精度的分類:超精確,精確,標準。
彈簧材料的形狀取決于測力傳感器的特性。
可以對氣密性進行另一種分類,如下所示。
?密封的:此類型將應變計的區域封閉在殼體內部,并保護其免受環境影響。通常,殼體的內部充滿惰性氣體,這使得這些設備適合在不利的環境條件下使用,例如在有灰塵或高濕度的情況下在室外使用。使用膜片或波紋管,以免影響彈簧材料的彎曲。
?敞開式:應變計沒有受到保護,或者最多只能用軟樹脂或橡膠修理,以免受到環境因素的傷害。它適用于溫度不太高,濕度或灰塵不多的環境中。
?防爆:由于其結構,這種類型的電池是防火的
除了其組成,應力和密封之外,還可根據其形狀對稱重傳感器進行分類(圖7)。因此,我們有光束類型(光束),罐頭類型(桶),S類型(S)和墊圈類型(墊圈或按鈕)。
單點和多點
稱重傳感器也可以區分為單點和多點:當需要使用單個稱重傳感器進行測量時,可以使用單點或單點類型,而多點假定使用了多個載荷。對于單點傳感器,由于已經校正了轉角誤差,因此將權重應用于了稱重傳感器。
對于多點,通常將三個或四個稱重傳感器放置在結構的各個點中,并適當添加它們的信號以校正施加力的任何角度誤差。

圖7
稱重傳感器的使用
要讀取通過稱重傳感器的力或重量,首先必須評估最合適的配置,然后是牽引力傳感器以檢測懸掛的重量或壓縮以稱重系統上的物體;此外,有必要查看需要什么樣的精度以及力來自哪個方向。

僅具有兩個應變儀的單元就可以檢測某種類型的力,并且需要通過兩個固定電阻器進行電橋連接,而具有四個應變儀的單元則以交叉方式排列,從而形成一個完整的惠斯通電橋。
在兩種情況下,電橋提供的信號都非常小。尤其是僅具有兩個應變儀的單元的電池,因為具有四個應變儀的單元的電池通過以適當的方式連接元件來提供差分信號,因此具有更大的幅度。

在任何情況下,都無法直接通過微控制器的ADC或Arduino讀取信號,但應進行調節。這個術語意味著放大剛好足以將電平提高到可以承受可能進入連接的干擾的值,并減少任何無線電干擾。
有特定的集成電路,或者在任何情況下都適用于應變式稱重傳感器的信號調節:例如INA125或HX711;這些頁面的專用框中均顯示了兩者的特征。

稱重傳感器和Arduino
當然,Arduino公眾發現稱重傳感器很有趣,這就是為什么我們考慮創建一些簡單的應用程序來提出建議。應該立即指定,要用Arduino讀取稱重傳感器提供的信號,必須插入一個調節電路,為此目的,上述兩個集成電路是合適的。在描述的應用程序中,我們將使用一個安裝了HX711(代碼HX711BOARD)和500g稱重傳感器代碼LOADCELL500的分組接口,它們將連接到Arduino,如圖11所示。

圖11
如您所見,該單元具有四根導線,如圖所示進行連接。從接線板的輸出中,該接線板從Arduino 5V汲取功率(并依次向稱重傳感器供電),獲取包含有關重力信息的數字信號。更確切地講,分線板通過DT(數據)線在兩線I2C型總線上提供數據字符串,該數據線與Arduino在SCK線上生成的時鐘同步。清單1提供了獲取通過稱重傳感器和HX711讀取的讀數所必需的代碼。
清單1
#include“ HX711.h”
#define Calibration_factor -9580.00 //此值是使用
// SparkFun_HX711_Calibration草圖
#定義DOUT 4
#定義CLK 5
HX711標度(DOUT,CLK);
void setup(){
Serial.begin(9600);
Serial.println(“ HX711 scale demo”);
scale.set_scale(calibration_factor);
scale.tare(); //假設秤上沒有重量
//在啟動時,將比例重置為0
Serial.println(“ Readings:”);
}
無效循環(){
Serial.print(“ Reading:”);
float libbre = scale.get_units();
浮動公斤=(libbre / 2.2046);
Serial.print(kg,1); //scale.get_units()返回一個浮點數
Serial.print(“ kg”); //您可以將其更改為kg,但是您需要
//重構Calibration_factor
Serial.println();
}
現在,讓我們轉到基于不同配置的第二個應用示例,即2個半電池,每個電池的容量為50kg(代碼LC50KG),總容量等于100kg。在電氣上,這些半單元構成惠斯通電橋的每一半,并通過基于HX711的常規分線板進行連接,如圖12所示。
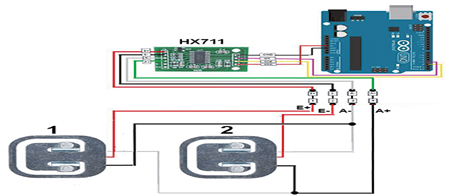
圖12
這些稱重傳感器具有以下特征:
輸出信號= 1 mV(±0.1);
非線性= 0.05(滿量程的百分比);
磁滯= 0.05(滿量程的%);
重復性= 0.05(滿量程的百分比);
1分鐘后蠕變= 0.1(滿量程的%);
溫度對出口的影響= 10°C(滿量程的0.1%);
溫度對零的影響= 10°C(滿量程的0.3%);
輸入電阻= 1 kohm(±10);
輸出電阻= 1 kohm(±10);
絕緣電阻》 2,000 Mohm
工作溫度= -10°C至+ 40°C;
電橋激勵電壓= 10 V;
尺寸(毫米):34x34x8。
對于Arduino連接,請記住,紅色線是正極(VCC),黑色是負極(GND),白色是要連接的輸出(OUT),如圖所示。
清單2中提供了用于通過初始皮重確定來執行重量測量的Arduino代碼,其中包括HX711庫。
清單2
#include“ HX711.h”
#define Calibration_factor -9580.00 //獲得的校準系數
//使用草圖SparkFun_HX711_Calibration
#define DOUT 4 //數字引腳DT
#定義CLK 5 //數字引腳SCK
HX711標度(DOUT,CLK);
void setup(){
Serial.begin(9600);
Serial.println(“ Rilevazione Peso con Tara iniziale”);
scale.set_scale(calibration_factor);
scale.tare(); //確保開始時沒有重量。
延遲(500);
Serial.println(“ Tara in corso 。.. non mettere nessun peso!”);
延遲(1000);
Serial.println(“ Sistema pronto。”);
延遲(300);
}
無效循環(){
Serial.print(“ Peso:”);
浮動磅= scale.get_units();
浮動公斤=(libbre / 2.2046); //轉換重量磅(千克)
Serial.print(kg,1);
Serial.print(“ kg”);
Serial.println();
延遲(500); //延遲的體重讀數。減少閱讀次數!
}
具有四個半電池的電路

圖13
從先前的配置中,我們獲得了另一個系統,該系統由4個相同類型的半測力傳感器組成,可用于檢測放置在半測力傳感器上的板條箱的重量,每個板條測力傳感器都布置在墻的一個角上。例如圖13中提出的結構。由于每個稱重傳感器(半個稱重傳感器)的重量均為50千克,因此我們可以通過完美平衡的方式達到最大200千克的重量,因為我們的元件位于四個角上。圖14提出的接線圖描述了用Arduino創建的電路; 紅色電纜從每個單元中“拾取”并連接到HX711板的引腳。這種惠斯通電橋構造允許具有平衡的系統,其中以平衡的方式測量重量。清單3中提出了與后一個應用程序示例相關的Arduino代碼。

圖14
清單3
#include“ HX711.h”
#定義DOUT 4
#定義CLK 5
const int buttonPin = 2;
int buttonState = 0;
HX711標度(DOUT,CLK);
浮動校正系數= -9640.00; //-7050適用于我的440lb最大比例設置
void setup(){
Serial.begin(9600);
Serial.println(“ HX711校準草圖”);
Serial.println(“讀數開始后,將已知重量放到秤上”);
Serial.println(“按+或a增加校準系數”);
Serial.println(“按-或z減小校準系數”);
scale.set_scale();
scale.tare(); //將比例尺重置為0
long zero_factor = scale.read_average(); //獲取基線讀數
Serial.print(“零系數:”); //這可用于消除去皮磅的需要。在永久規模的項目中很有用。
Serial.println(zero_factor);
pinMode(buttonPin,INPUT);
}
無效循環(){
buttonState = digitalRead(buttonPin);
如果(buttonState == HIGH){
scale.set_scale();
scale.tare(); //將比例尺重置為0
long zero_factor = scale.read_average(); //獲取基線讀數
Serial.print(“零系數:”); //這可用于消除去皮磅的需要。
Serial.println(zero_factor);
pinMode(buttonPin,INPUT);
}
scale.set_scale(calibration_factor); //調整到這個校準系數
Serial.print(“ Reading:”);
float libbre = scale.get_units();
浮動公斤=(libbre / 2.2046);
Serial.print(kg,1); //scale.get_units()返回一個浮點數
Serial.print(“ kg”);
Serial.print(“ Calibration_factor:”);
Serial.print(calibration_factor);
Serial.println();
if(Serial.available())
{
char temp = Serial.read();
if(temp ==‘+’|| temp ==‘a’)
標定系數+ = 10;
否則if(temp ==‘-’|| temp ==‘z’)
標定系數-= 10;
}
}
-
傳感器
+關注
關注
2541文章
49979瀏覽量
747677 -
稱重傳感器
+關注
關注
5文章
225瀏覽量
20114 -
惠斯通電橋
+關注
關注
0文章
40瀏覽量
10749
發布評論請先 登錄
相關推薦
稱重傳感器的工作原理及應用
稱重傳感器的使用小技巧
稱重傳感器的應用
什么是稱重傳感器
稱重傳感器的使用
稱重傳感器的工作原理_稱重傳感器的應用
稱重傳感器是什么,它的類型及構造是怎樣的
什么是稱重傳感器,它的工作原理是怎樣的
稱重傳感器工作原理及輸出選項





 工商網監
工商網監
評論