") 基于SPS控制的DAB建模分析
基于SPS控制的DAB建模分析
1 汽車(chē)電源應(yīng)用場(chǎng)景
電動(dòng)汽車(chē)電源系統(tǒng)由動(dòng)力電池充電電源、低壓電源、電機(jī)驅(qū)動(dòng)三個(gè)子系統(tǒng)組成,其中高壓動(dòng)力電池為車(chē)載電源系統(tǒng)的核心,為電機(jī)及車(chē)內(nèi)低壓用電器供電。系統(tǒng)框圖如圖1所示。車(chē)載充電機(jī)或充電樁均可作為動(dòng)力電池充電子系統(tǒng),而車(chē)載充電機(jī)由于其較高的便攜性所以被廣泛使用。
車(chē)載充電機(jī)常由功率因數(shù)校正(PFC, Power Factor Correction)電路和隔離型雙向DC/DC電路構(gòu)成,為了實(shí)現(xiàn)高效、快速充電,減少充電過(guò)程中對(duì)電池的損害,充電機(jī)的輸出電流一般隨著電池電量的變化而不斷變化。低壓電源子系統(tǒng)由隔離型雙向低壓大電流DC/DC電路和低壓電池組組成,其作用分為兩個(gè)部分,一方面在充電時(shí)為車(chē)載充電機(jī)輸出電容進(jìn)行預(yù)充電,另一方面為車(chē)載低壓用電器供電,保證整車(chē)的正常運(yùn)行。電機(jī)驅(qū)動(dòng)子系統(tǒng)主要由電機(jī)驅(qū)動(dòng)變流器和電機(jī)構(gòu)成,是電動(dòng)汽車(chē)正常行駛時(shí)的動(dòng)力來(lái)源。
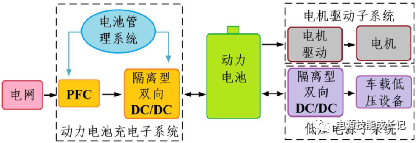
圖1電動(dòng)汽車(chē)電源框圖
后級(jí)多采用雙向DC/DC變換器,其中雙有源橋變換器應(yīng)用最為廣泛。在DAB電路中,輸入側(cè)和輸出側(cè)均為主動(dòng)式全橋電路,通過(guò)控制原邊全橋與副邊全橋輸出的相角差以及原副邊全橋輸出的占空比來(lái)調(diào)節(jié)能量傳遞的大小和方向。DAB拓?fù)溆休^寬的軟開(kāi)關(guān)范圍,同時(shí)其控制方式簡(jiǎn)單,在中大功率場(chǎng)合得到廣泛的應(yīng)用。然而,由于移相控制的存在,使得電路中環(huán)流損耗加大,開(kāi)關(guān)損耗也隨之增高,系統(tǒng)的效率受到限制。
為了解決上述問(wèn)題,很多學(xué)者對(duì)DAB電路的控制策略的研究一直在深入,例如雙重移相控制方法、三重移相控制方法、變頻移相混合控制方法等,這些控制策略能夠在一定程度上降低電路的環(huán)流損耗,拓寬軟開(kāi)關(guān)工作范圍,提升系統(tǒng)效率。DAB變換器拓?fù)淙鐖D2所示。

圖2雙有源橋拓?fù)?/p>
2 SPS控制原理
DAB變換器控制變量較多(D:原邊與副邊之間移相比,D 1 :原邊對(duì)角移相比,D2副邊對(duì)角移相比)。其中最經(jīng)典、最廣泛的為SPS控制方法。SPS控制只有一個(gè)外移相D控制變量,由于DAB適用于寬電壓輸出工況,那么輸出電壓改變,對(duì)應(yīng)原邊和副邊之間電壓傳輸比發(fā)生改變,對(duì)應(yīng)電流應(yīng)力、傳輸功率和回流功率均發(fā)生改變。將會(huì)嚴(yán)重影響電源轉(zhuǎn)換效率。
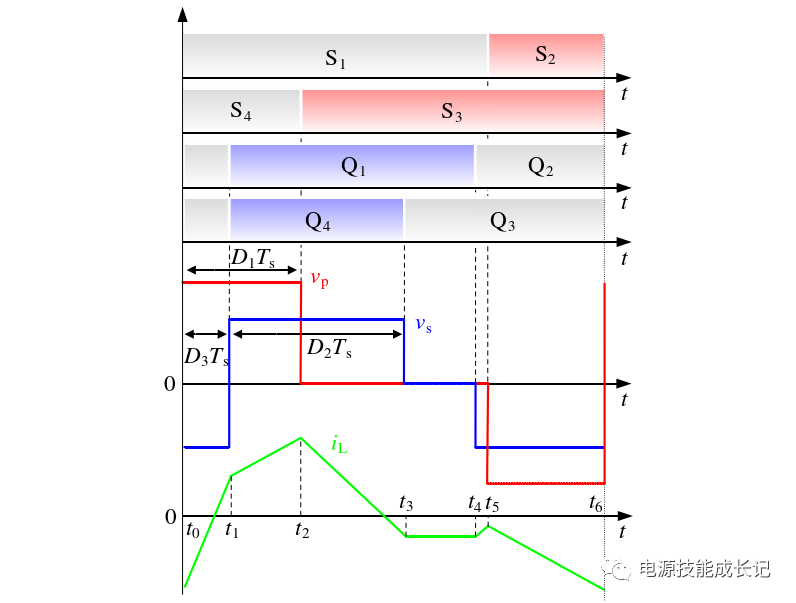
在此基礎(chǔ)上,學(xué)者通過(guò)增加控制變量和優(yōu)化電流應(yīng)力的方法來(lái)較小導(dǎo)通損耗和回流功率,以提高電源的效率。SPS控制波形如圖3所示。

圖3SPS控制原理
3 模型搭建與分析
根據(jù)電壓傳輸比k= V 1 /nV2的不同,可以將DAB變換器分為Boost和Buck兩種工作模式,這里以Buck工作模式( k >1)為例進(jìn)行建模分析。
建模首要工作是搭建滿(mǎn)足開(kāi)關(guān)管工作時(shí)序的驅(qū)動(dòng)波形,PWM發(fā)波實(shí)現(xiàn);搭建主功率回路,各器件均按照實(shí)際參數(shù)設(shè)置,這樣仿真結(jié)果更接近實(shí)際情況;這兩步驟完成,對(duì)DAB變換器進(jìn)行開(kāi)關(guān)測(cè)試,若在額定工況下能正常運(yùn)行,下面將進(jìn)行PI參數(shù)設(shè)置,使DAB能夠?qū)崿F(xiàn)閉環(huán)運(yùn)行,測(cè)試正向運(yùn)行模式,相應(yīng)反運(yùn)行就很容易實(shí)現(xiàn)。仿真模型如圖4所示。
本模型基于PSIM2020a仿真環(huán)境,設(shè)計(jì)工作頻率fs=100kHz,輸出功率Po=240W,輸入電壓Vin=300VDC,輸出電壓Vo=48VDC。
首先測(cè)試各個(gè)開(kāi)關(guān)管驅(qū)動(dòng)波形如圖5所示,驅(qū)動(dòng)波形控制要求,測(cè)試額定工作條件下,原邊橋口電壓、副邊橋口電壓和電感電路波形如圖6所示。輸入功率如圖7所示。開(kāi)關(guān)管Q1和Q5的ZVS波形如圖8所示。反向運(yùn)行與正向相似,這里不再展開(kāi)。

圖4基于SPS的雙向DAB模型

圖5開(kāi)關(guān)管驅(qū)動(dòng)波形

圖6關(guān)鍵工作波形

圖7輸入功率

圖8 ZVS實(shí)現(xiàn)
-
電動(dòng)汽車(chē)
+關(guān)注
關(guān)注
155文章
11696瀏覽量
227972 -
電源系統(tǒng)
+關(guān)注
關(guān)注
3文章
596瀏覽量
37666 -
DAB
+關(guān)注
關(guān)注
1文章
23瀏覽量
14899 -
SPS
+關(guān)注
關(guān)注
1文章
66瀏覽量
10325 -
車(chē)載充電機(jī)
+關(guān)注
關(guān)注
14文章
144瀏覽量
11627
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
教學(xué)驗(yàn)證篇丨PPEC+HIL DAB仿真驗(yàn)證
DAB數(shù)字廣播天線(xiàn)
DAB數(shù)碼收音機(jī)
DAB數(shù)碼收音機(jī)方案
DAB智能收音機(jī)
DAB基帶芯片解析
什么是DAB/數(shù)字音頻廣播
基于時(shí)間Petri網(wǎng)的并發(fā)系統(tǒng)建模分析方法

C912C DAB和DAB+與FM數(shù)字收音機(jī)模塊的數(shù)據(jù)手冊(cè)免費(fèi)下載
8.3系統(tǒng)中SPS的調(diào)用控制簡(jiǎn)析
DAB Announcement高效測(cè)試方案及應(yīng)用分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論