 基于EtherCAT通信有限時間位置收斂伺服系統設計
基于EtherCAT通信有限時間位置收斂伺服系統設計
作品簡介
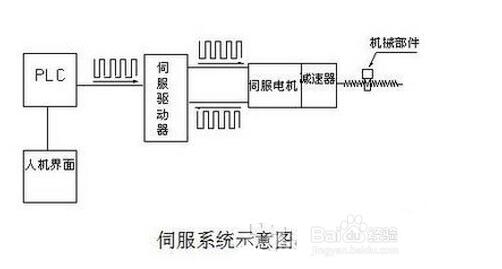
針對高動態性能、高穩態精度的伺服系統,設計了有限時間位置控制器,實現了系統在變化的位置指令下,柔順地從當前位置運動至目標位置。針對伺服驅動器電流傳感器故障,設計了基于鏡像電流方法的相電流傳感器容錯控制策略,提高了伺服驅動器的可靠性。
最后,基于STM32微控制器,構建EtherCAT通訊主、從站,相比于傳統通信方式,EtherCAT通信具有數據傳輸速率快、傳輸距離遠等優勢,可實現多伺服系統的集中控制。項目組已與相關企業建立合作關系,目前所研制伺服系統產品正處于生產測試階段。
作品全貌
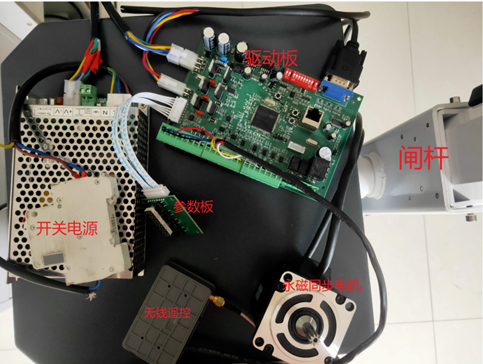
硬件設計
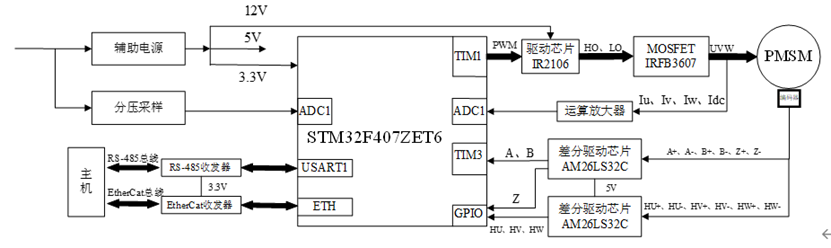
該控制電路主要功能是伺服電機運動控制,以及RS485;ETHERCAT通訊控制,按鍵板等。
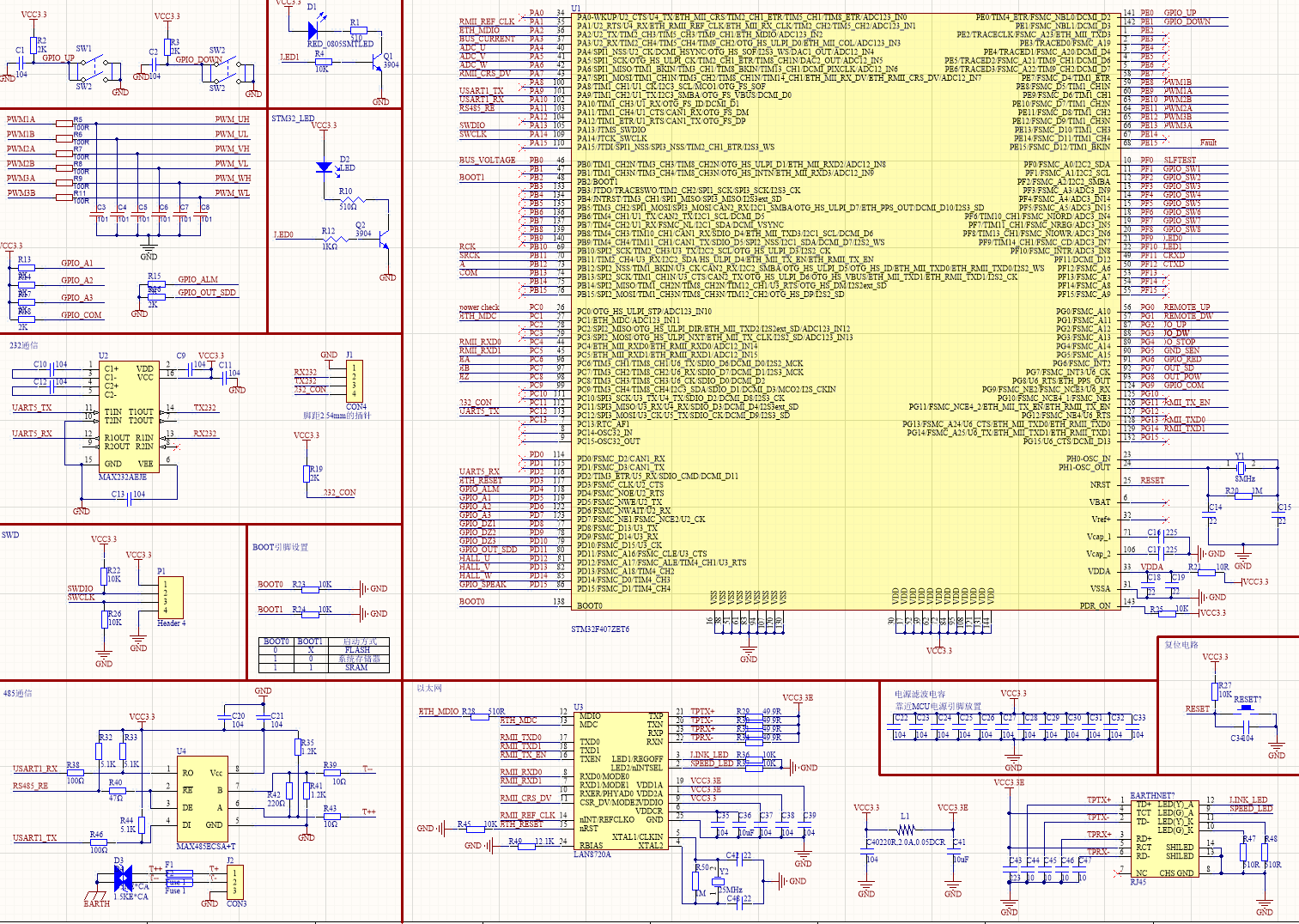
其中主控使用的是STM32F407ZET6,電機采用永磁同步電機,驅動器采用的是IR2106S,編碼器采樣芯片AM26LS32C四路差分驅動芯片,數碼管顯示功能電路采用74HC595和TPIC6B595移位寄存器,RS485通信接口芯片MAX485ECSA+T與RS-485總線連接,以太網芯片采用LAN8720A。
軟件設計
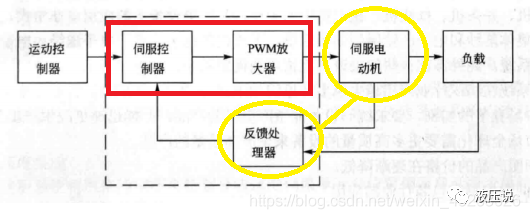
本項目采用最為常用的基于控制的永磁同步電機伺服系統控制方法,該方法因沒有直軸電流,電機沒有直軸電樞反應,不會使永磁體退磁,電機所有電流均用來產生電磁轉矩,電流控制效率高。本項目要求伺服電機的過載能力強、動態響應快、轉矩線性度高、控制方法簡單可靠,因此選用表貼式永磁同步電機。
為了保證伺服道閘系統的精確控制,本實驗通過位置、速度、電流三環控制,伺服電機能夠實現快速的動態響應、較高的轉矩線性度、可靠的控制以及較強的帶載能力。然而,PI調節始終無法在不同負載、不同轉速要求、不同位置給定下實現快速性與零超調量并存。
本項目使用的一種加速度連續的實時位置規劃控制方法,具有計算簡便和實時性強的優點,只需要根據目標位置和當前狀態進行判斷和簡單的運動過程計算處理,避免了復雜運算,簡化了計算過程。同時,在每一控制周期內,在加速度連續的前提下,根據最新的目標位置,進行狀態判斷和位置規劃,能夠實時跟隨快速變化的位置指令,適用于高動態性能的伺服系統。


系統測試
1.位置環S曲線測試

2.有限時間收斂測試

3.以太網通信測試

總結
本文以道閘項目為研究背景,設計一款基于EtherCAT通信有限時間位置收斂的伺服系統。針對高速度、高控制精度、高效率的要求,對伺服驅動器的方案論證、硬件設計和軟件設計等方面進行了分析研究。概括起來,本文主要完成了以下工作:
(1)運用加速度連續的實時位置規劃控制方法,既解決了基于連續加速度的S型位置規劃曲線算法在位置伺服系統運動規劃控制出現的運算復雜問題,又解決了不能適應位置指令快速變化等問題,保證道閘系統運行的穩定性。
(2)運用了有限時間收斂算法,系統在有限時間內就能夠達到相應的穩定狀態,提高了系統響應速度,保證道閘系統運行的快速性。
(3)運用EtherCAT通信技術,提高控制器和驅動器之間的數據傳輸速度及可靠性,更好滿足伺服系統對實時性和同步性的要求,實現伺服驅動系統網絡化控制。
(4)本項目設計的伺服驅動器具有電流傳感器的容錯能力,可以保證系統在出現斷線故障時仍能正常工作,增加了伺服驅動器的使用壽命。
(5)本項目設計的伺服系統的PCB板,合理設置布局布線和散熱布局,最大程度的節省了成本,提高了伺服驅動器的集成度和功率密度。
-
微控制器
+關注
關注
48文章
7489瀏覽量
151055 -
電流傳感器
+關注
關注
10文章
976瀏覽量
41101 -
伺服系統
+關注
關注
14文章
561瀏覽量
39180 -
伺服驅動器
+關注
關注
22文章
475瀏覽量
31479 -
EtherCAT總線
+關注
關注
5文章
70瀏覽量
5367
發布評論請先 登錄
相關推薦
位置伺服系統控制算法的研究


伺服系統淺析,伺服系統的分類、結構組成與技術要求
開環位置伺服系統及現代交流伺服系統的解析

伺服系統是什么_伺服系統的基本要求_伺服系統的基本組成
伺服系統什么意思_伺服系統的作用是什么
伺服系統應用于哪兒_伺服系統應用實例
伺服系統的工作原理
伺服系統原理及分類

什么是伺服系統?伺服系統的分類、組成及特點





 工商網監
工商網監
評論