 ECU如何傳輸數據?
ECU如何傳輸數據?
前言
前面已經介紹了幾種總線協議,那現在如果在汽車上實際應用一種總線協議來通訊的話,你會選擇哪一種呢?
答案是 都不行
因為在汽車中許多系統都需要實時控制,而且數據必須可靠,即使面對面對惡劣環境也要正常運行
如何解決這個問題呢?就要看CAN總線了
ECU如何傳輸數據?
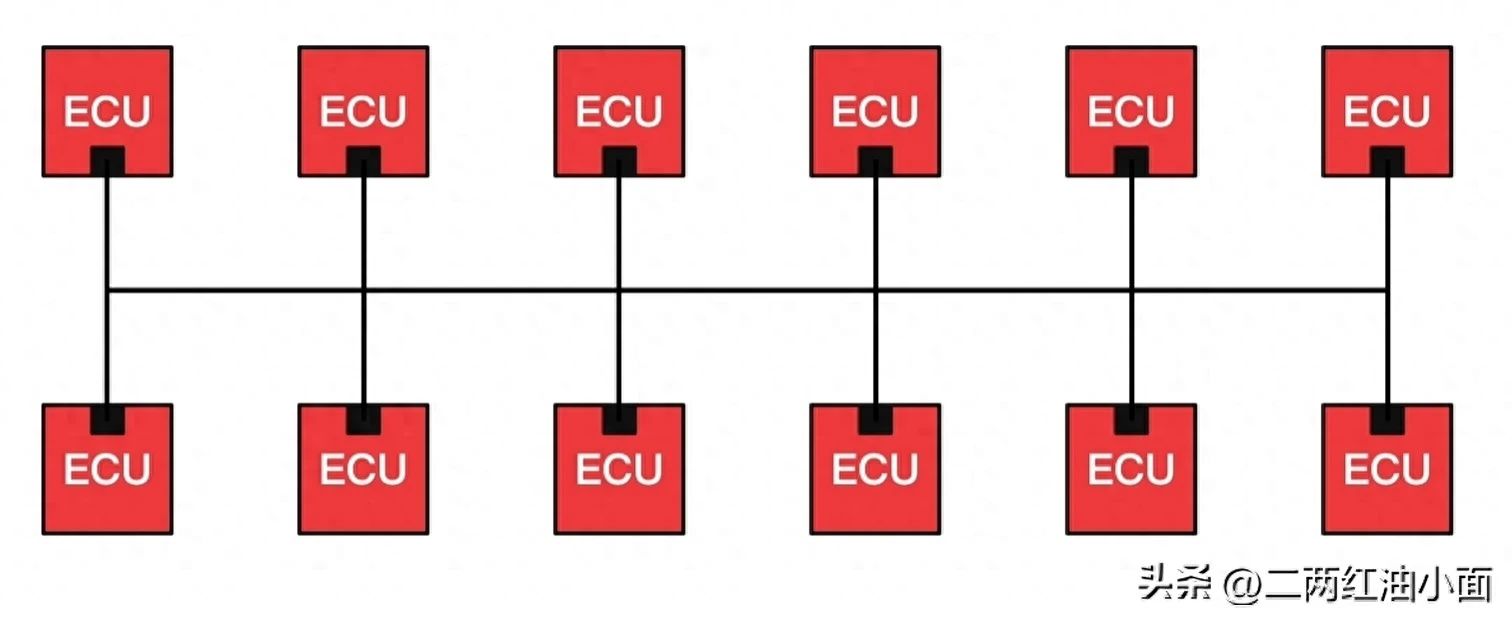
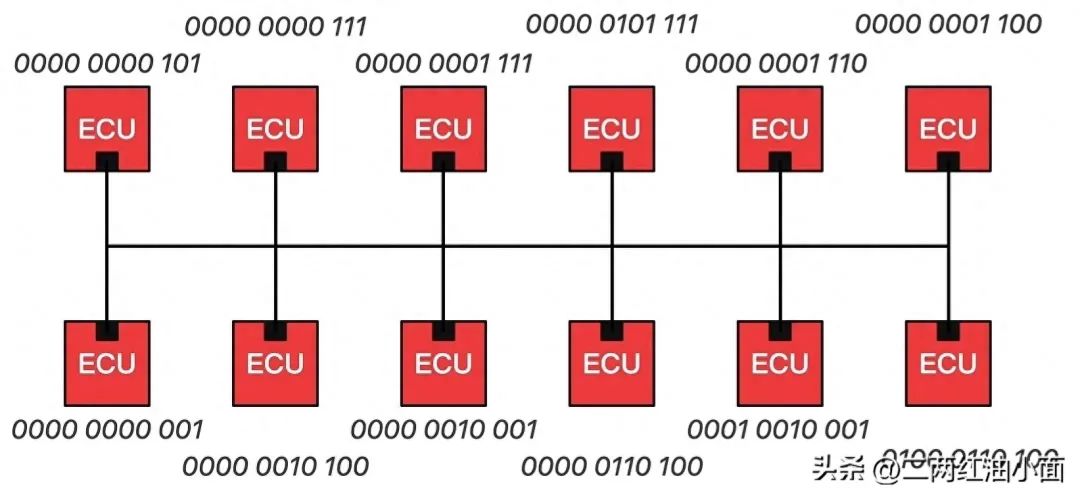
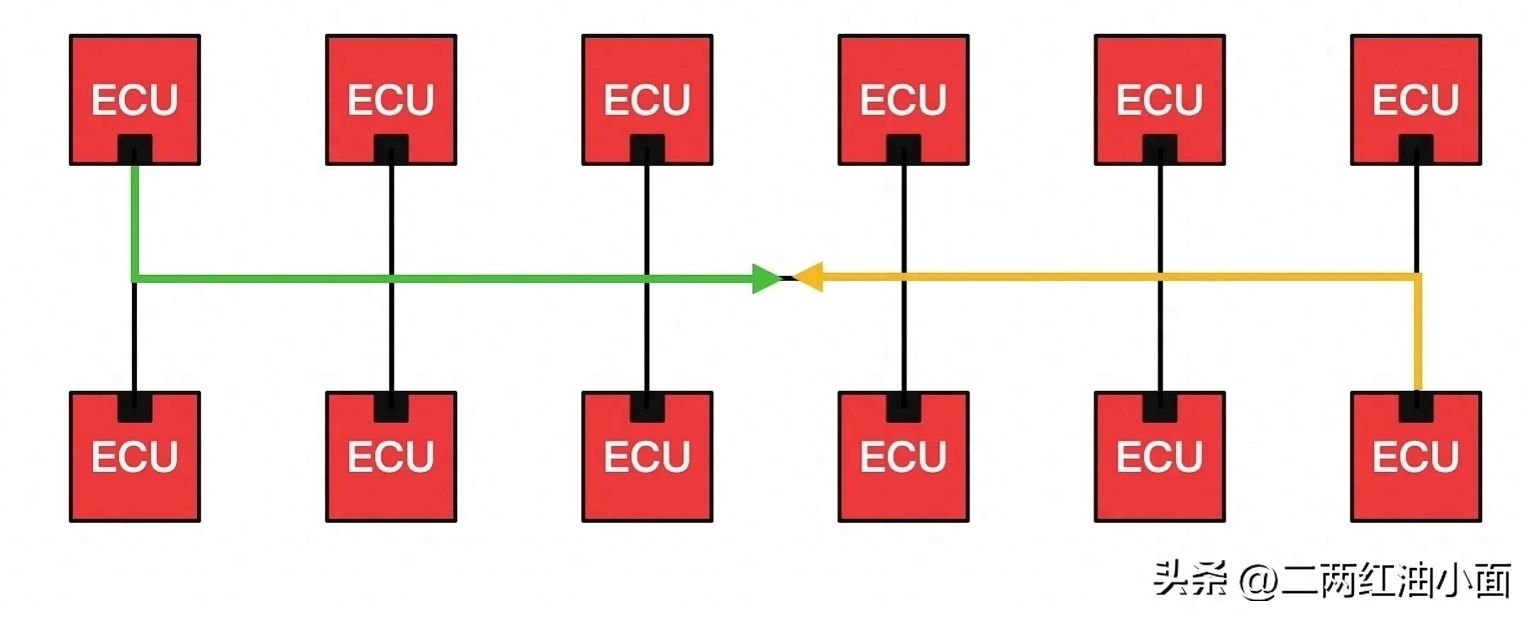
現在將車上的每個設備用一條總線連接起來
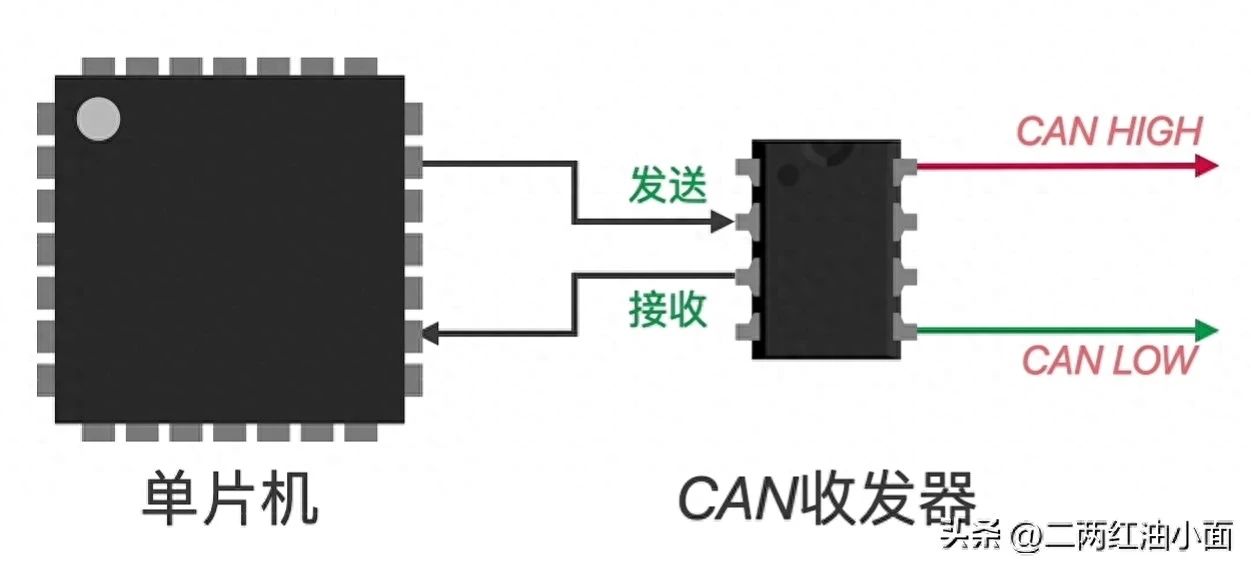
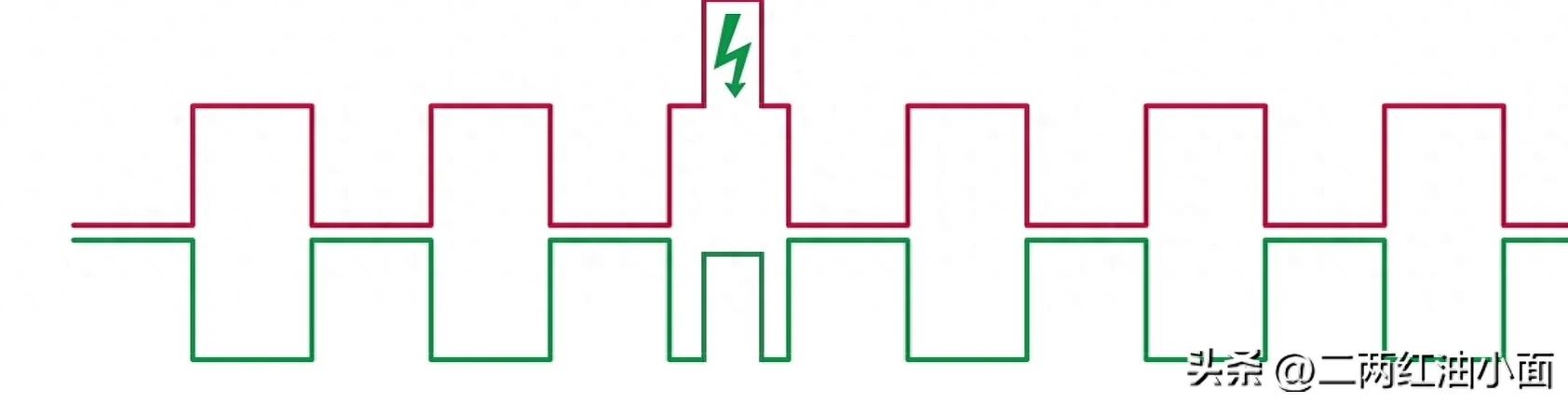
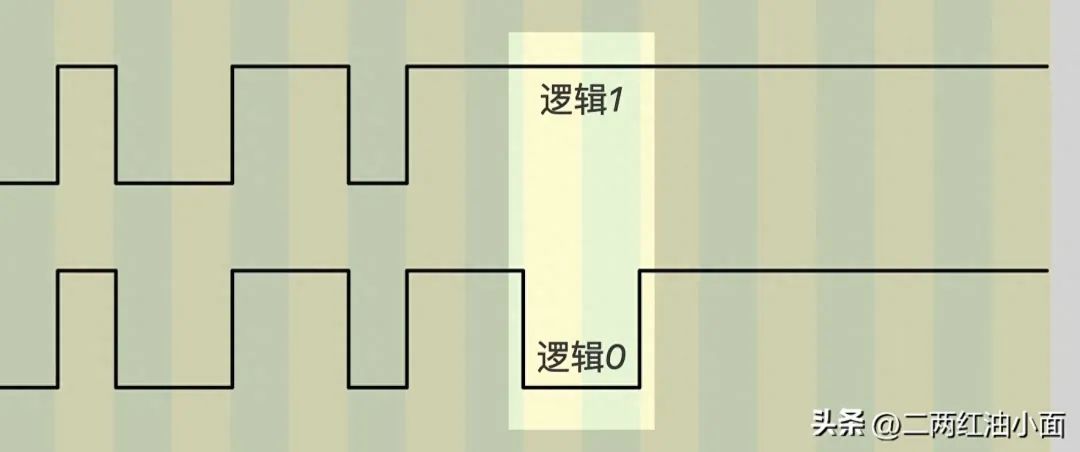
要想CAN通訊,就必須要專門的CAN收發器,經過CAN收發器,普通信號就會轉化成差分信號(差分信號由兩根線表示)
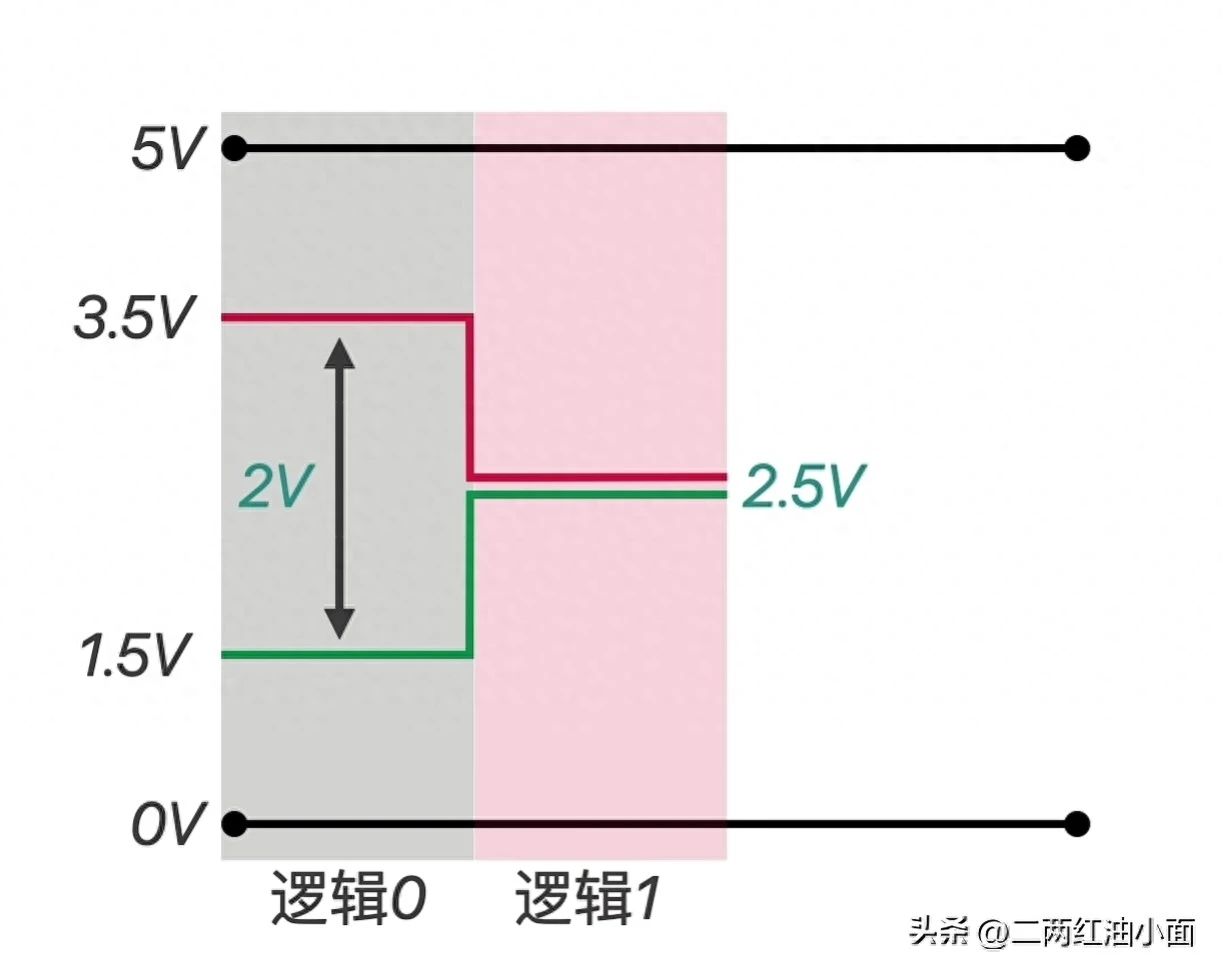
如果輸入0,CAN收發器的兩根線分別輸出3.5V和1.5V(壓差為2V)
如果輸入1,CAN收發器的兩根線都輸出2.5V(壓差為0V)
為什么要這樣表示數據?
想象一下,如果這條線是0V,受到了干擾,電壓就會波動
如果是兩條線纏繞在一起,用差分信號來表示數據的話,即使受到了干擾,也是兩條線一起受到干擾,依舊存在壓差
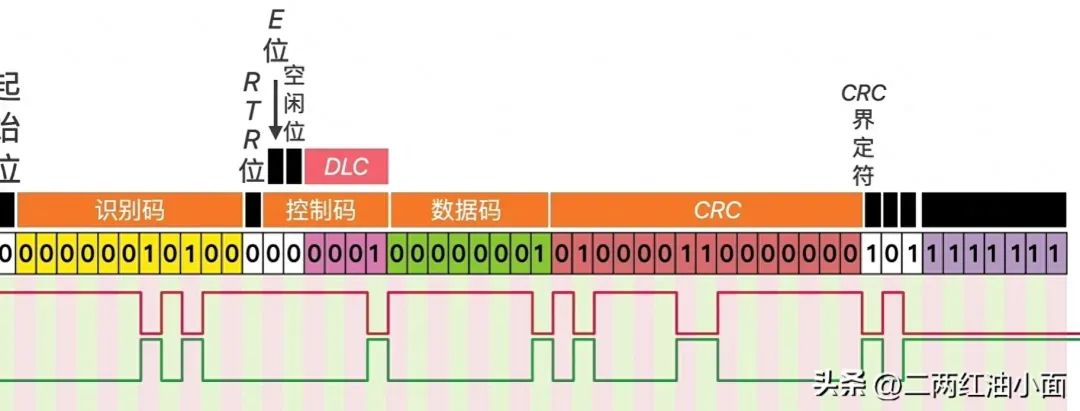
CAN數據格式
這是一幀完整的數據
最開始是起始位(始終為0)
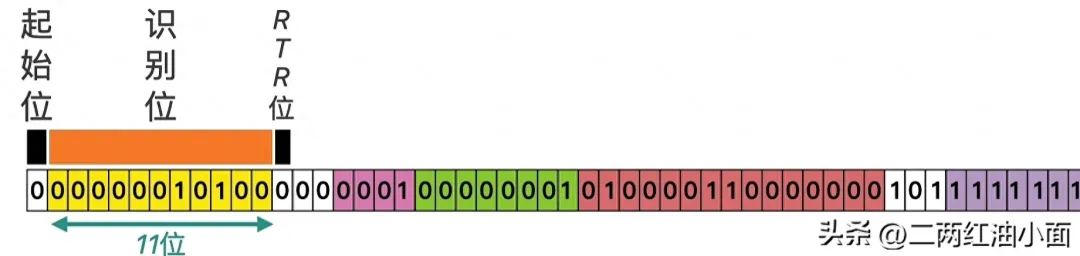
然后是11位的識別碼
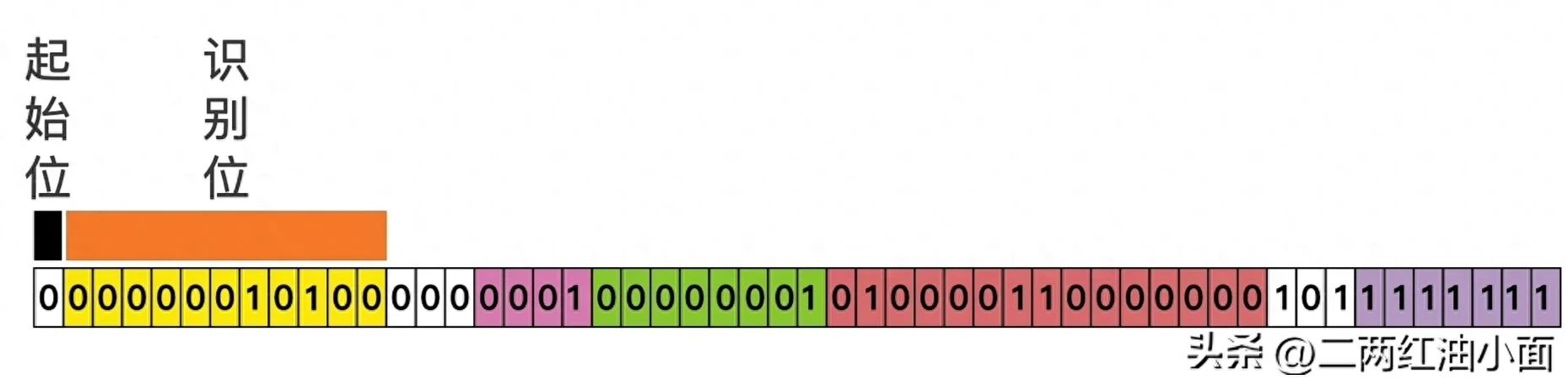
每一個設備都有唯一的11位識別碼
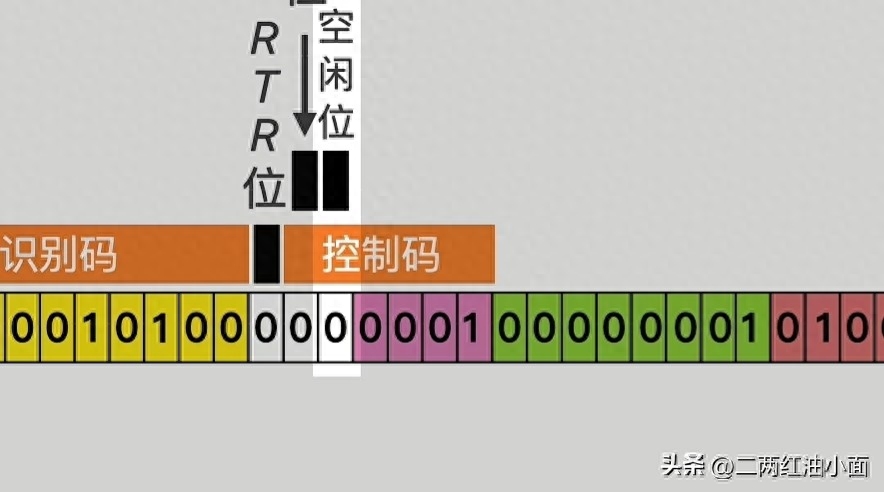
緊接著是RTR位用來區分數據幀(0)或遠程請求幀(1)
接下來是6位控制碼
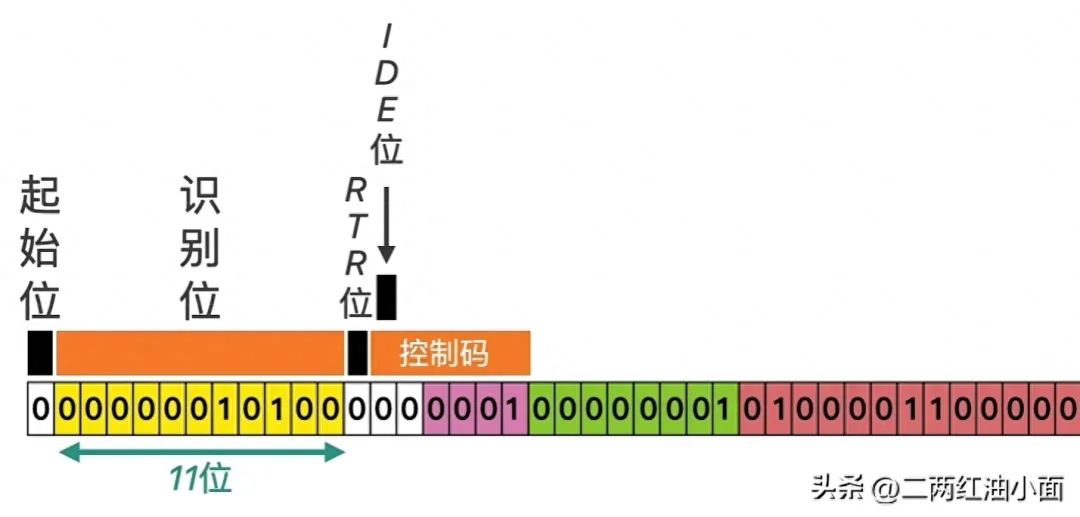
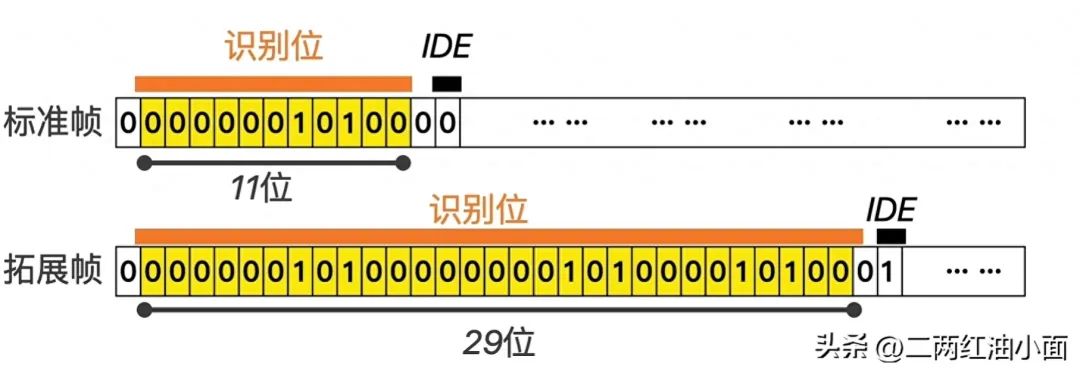
其中第一位的IDE位是用來區分是標準幀還是拓展幀(標準幀有11位的識別碼,IDE位為0;而拓展碼有29位的識別碼,IDE位為1)
下面是預留位,它是邏輯0
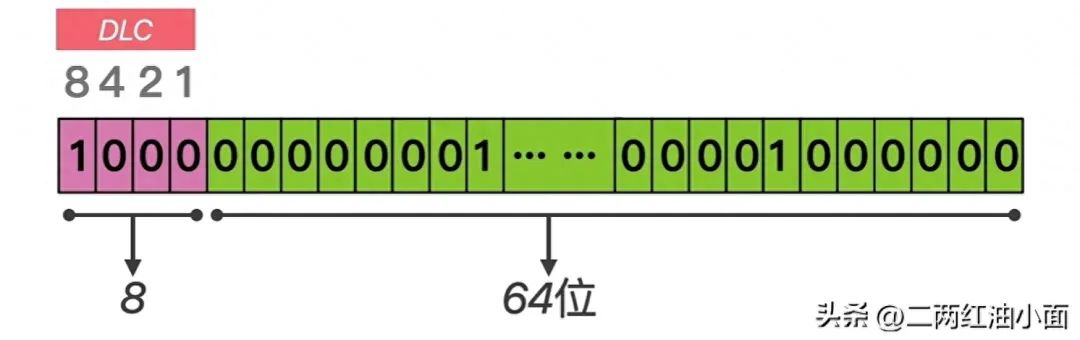
剩下的4位為DLC位,表示數據長度
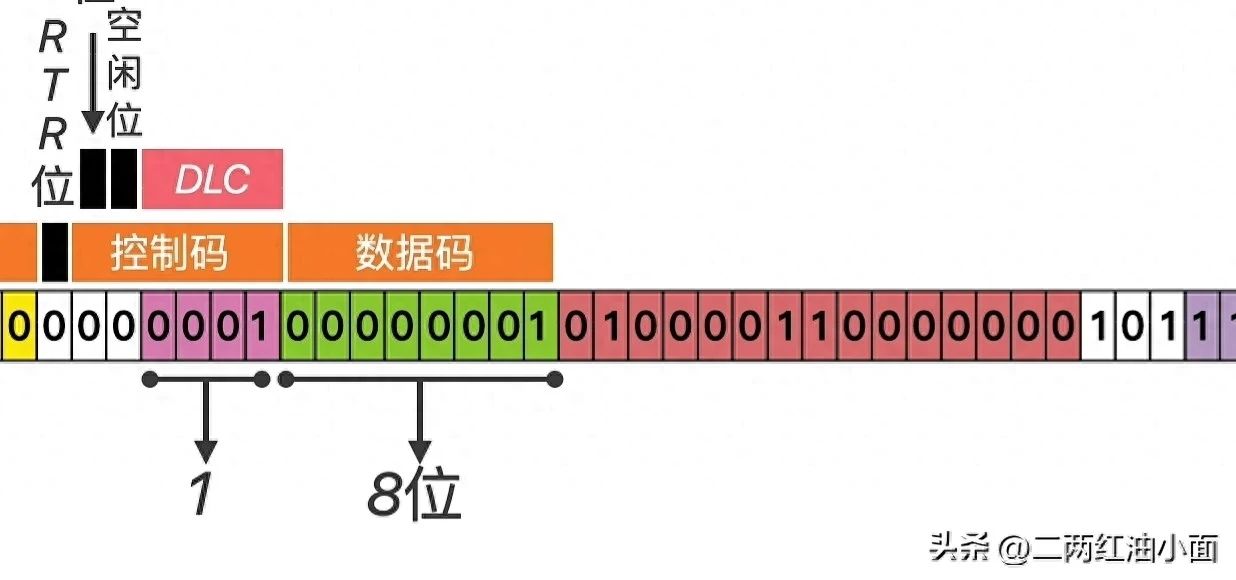
每一個數值對應每一個字節(比如如圖數值為8,對應數據長度為8個字節)
接下來是16位的CRC循環冗余校驗位,它是為了確保收到的數據的準確性
首先是15位CRC校驗位,如果和接收到的CRC校驗位不一致,就會重新再重發一次
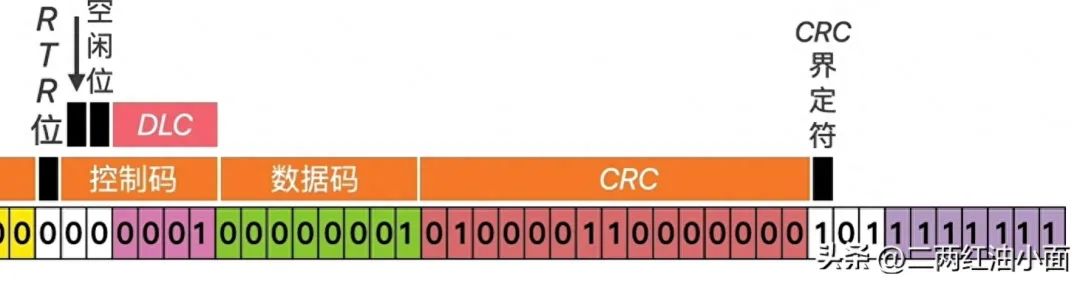
最后是CRC界定位,目的是為了與后面的數據區分開來
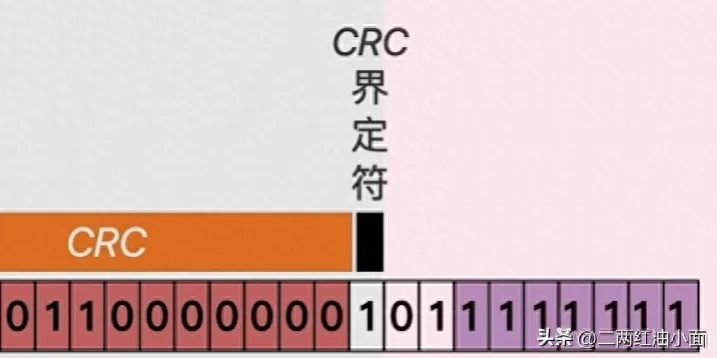
然后是2位ACK碼
第一位是ACK確認槽(發送端是1,接收端就是0)用來表示應答
第2位是ACK界定位(始終為1),目的也是為了和后面的數據區分開來,
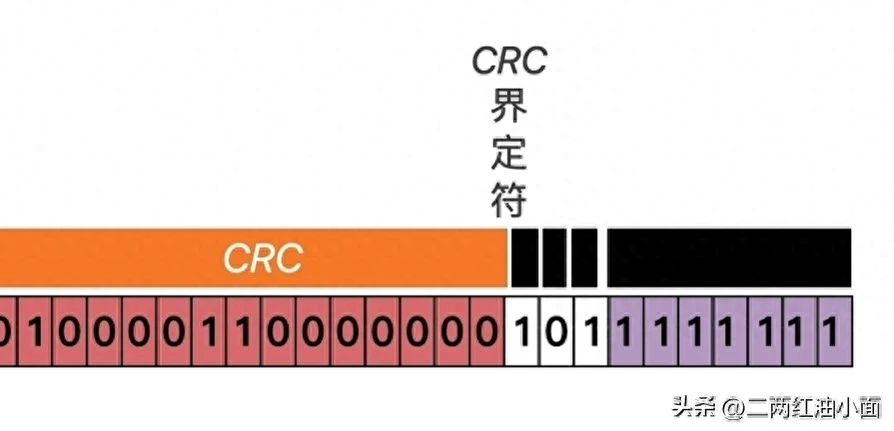
最后是7位結束位(時鐘為1)
如果用用差分信號表示,電平是這樣的,如圖所示
如果此時總線上同時有2個設備發出控制信號,究竟優先執行哪一個設備的信號呢?
這就得看11位的識別碼了,它不僅指定了哪個設備,還表示了優先級
當總線同時為1或0,總線會被置為0(即優先執行電平0)
總結
了解完了CAN總線,或許會有一個疑惑點?
CAN總線和RS485是不是有點相似,對吧?
雖然的確有些相似之處,但CAN總線是專門用于汽車領域的,就比如數據可靠性,CAN總線檢測到數據不一致,就會重新發送,而485就發一次,不管是不是正確的數據
相對485不止一個優點,礙于文字,就不過多敘述了
-
收發器
+關注
關注
10文章
3338瀏覽量
105542 -
CAN
+關注
關注
57文章
2663瀏覽量
462461 -
總線
+關注
關注
10文章
2817瀏覽量
87711
原文標題:總結
文章出處:【微信號:LinuxHub,微信公眾號:Linux愛好者】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

汽車ECU以及外圍線路
CANoe:網絡和ECU開發、測試和分析的專業工具
ECU的靜態電流
ECU的原理是什么?
車載ECU的Bootloader實現方法概述
診斷設備和汽車ECU之間的數據交換
汽車中的ECU, VCU, MCU, HCU分別是什么
汽車ECU分類
ECU/MCU軟件開發
ECU是怎么啟動或關閉的呢?ECU啟動方式有沒有一般規律呢
CSEc MASTER ECU KEY更新錯誤的原因?
汽車ECU是什么?ECU是如何工作的
ECU刷寫流程之壓縮刷寫技術解析






 工商網監
工商網監
評論