 機器人技術中常用的路徑規劃算法的開源庫
機器人技術中常用的路徑規劃算法的開源庫
如何規劃機器人的運動方式是機器人開發領域的一大課題,本文分享GitHub的一個機器人技術中常用的路徑規劃算法的開源庫,并用動圖直觀演示運行過程。其中大部分代碼由Python實現。
該開源庫中實現的路徑規劃算法包括基于搜索和基于采樣的規劃算法,具體目錄如下圖所示:
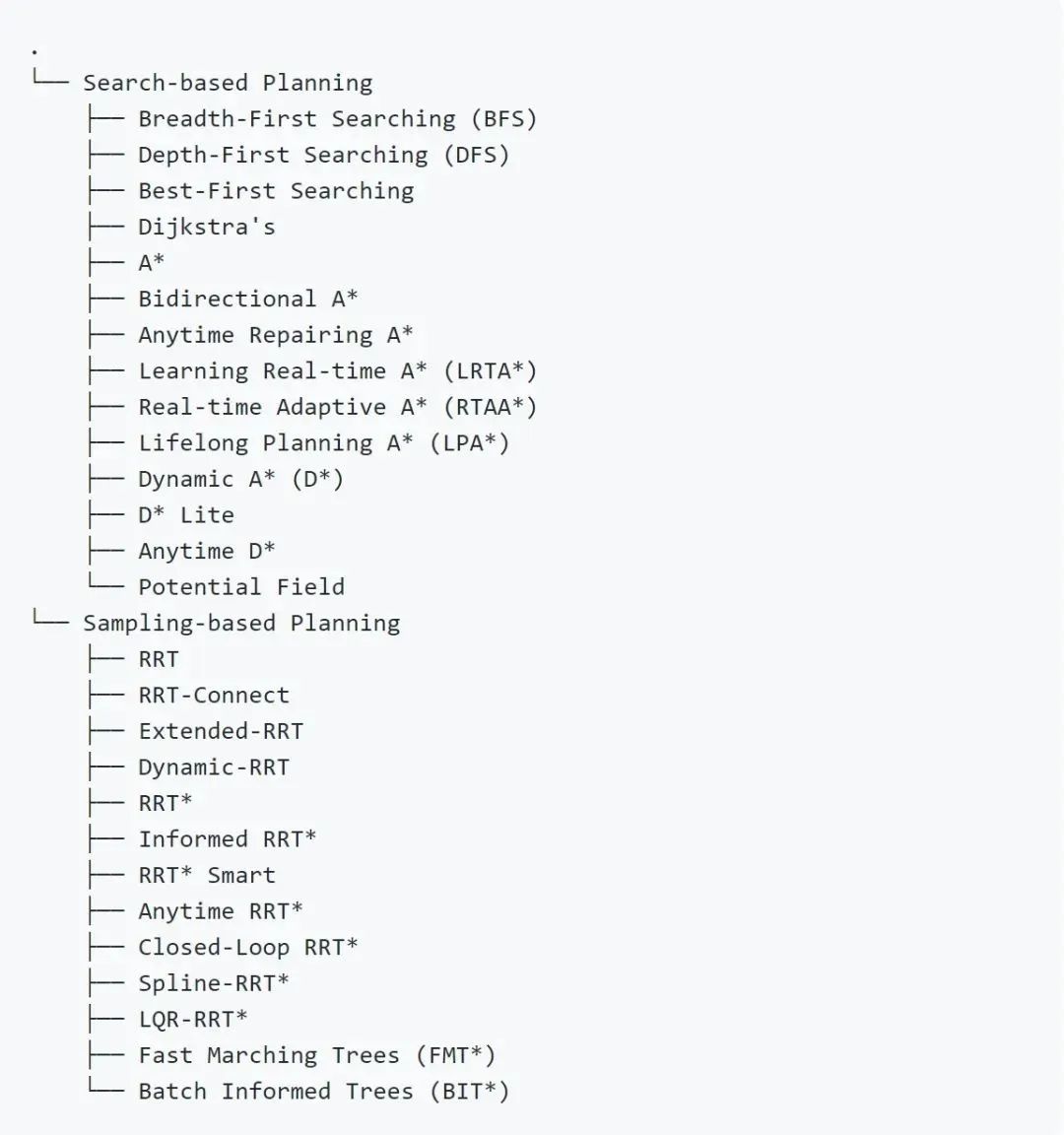
01基于搜索的路徑規劃算法
基于搜索的路徑規劃算法已經較為成熟且得到了廣泛應用,常常被用于游戲中人物和移動機器人的路徑規劃。
最佳路徑優先搜索算法
Dijkstra 算法
A * 搜索算法
雙向 A * 搜索算法
重復 A * 搜索算法
Anytime Repairing A* (ARA*) 搜索算法
實時學習 A * 搜索(LRTA*)算法
實時適應性 A * 搜索(RTAA*)算法
動態 A * 搜索(D*)算法
終身規劃 A * 搜索算法
Anytime D * 搜索算法:變動較小
Anytime D * 搜索算法:變動較大
02
基于采樣的路徑規劃算法
與基于搜索不同,基于采樣的路徑規劃算法不需要顯式構建整個配置空間和邊界,并且在高維度的規劃問題中得到廣泛應用。
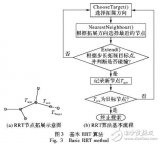
快速隨機搜索樹(RRT)算法
目標偏好 RRT 算法
雙向快速擴展隨機樹(RRT_CONNECT)算法
Extended_RRT 算法
動態 RRT 算法
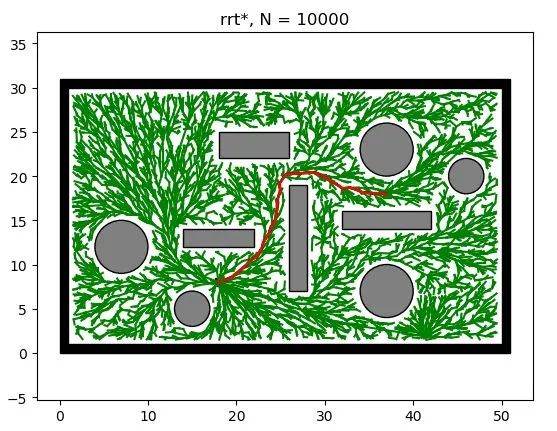
N = 10000 時,rrt * 算法
N = 1000 時,rrt*-Smart 算法
快速行進樹(FMT*)算法
N =1000 時,Informed rrt * 算法
Batch Informed 樹(BIT*)算法
審核編輯:湯梓紅
-
機器人
+關注
關注
210文章
28191瀏覽量
206505 -
算法
+關注
關注
23文章
4599瀏覽量
92638 -
路徑規劃
+關注
關注
0文章
78瀏覽量
15311 -
GitHub
+關注
關注
3文章
466瀏覽量
16384
原文標題:干貨丨機器人開發常用路徑規劃算法開源庫,開發者必備
文章出處:【微信號:gh_c87a2bc99401,微信公眾號:INDEMIND】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論