 解決方案 | 3D視覺引導發動機上蓋拆垛抓取
解決方案 | 3D視覺引導發動機上蓋拆垛抓取
隨著工業自動化和機器人技術的不斷發展,機器人技術在各行各業得到廣泛應用。其中,3D視覺引導機器人在工業領域具有巨大潛力,為發動機制造行業帶來了全新的機遇。
項目背景:
在現代制造業中,發動機裝配是一個復雜而關鍵的環節。然而,傳統的人工操作方式一直面臨效率低下和安全隱患等挑戰。為了提高生產效率和質量,引入機器人技術成為必然選擇。通過機器人技術和3D視覺的應用,實現發動機上蓋拆垛抓取的自動化。
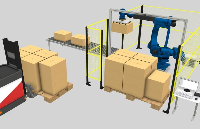
項目現場
項目難點:
1、空間狹小,視野范圍大,節拍較快。
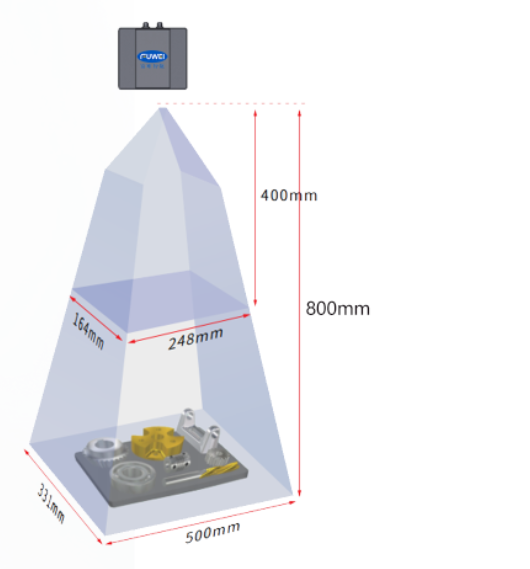
2、節拍在8s內,快速識別長1150mm*寬200mm*高800mm 復雜的發動機缸蓋。
3、現場環境光線影響,對3D相機成像效果要求高。
4、正反面識別,視覺系統精度在0.2mm,需要克服現場環境光的不利影響。
現場物料
解決方案:
采用機器人+3D視覺,通過拍攝的3D圖像進行發動機上蓋的感知和定位,結合深度學習算法進行模式識別和目標跟蹤,實現自動化的拆垛抓取。
3D模板
方案優勢:
1、基于自主研發的深度學習算法建立可以穩定識別各種工件的通用模型。
2、在提高工件識別準確度的同時,大大簡化了系統調參難度,顯著提高了系統部署效率。
3、自主研發的算法軟件,自動生成機器人抓取軌跡,保證工件抓取過程無碰撞。

3D點云圖
3D視覺引導發動機上蓋拆垛抓取技術的應用是工業自動化領域的一項重要創新。這項技術在提高生產效率和質量、提升工作安全性方面具有巨大潛力,并且具備廣闊的發展前景。
審核編輯 黃宇
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28231瀏覽量
206618 -
3D視覺
+關注
關注
4文章
430瀏覽量
27493
發布評論請先 登錄
相關推薦
氣密測試解決方案---汽摩發動機
應用背景發動機作為汽車和摩托車最關鍵的心臟部位,整體的安全性可想而知,作為汽車、摩托車發動機最必要的一環---氣密性檢測也是各個發動機生產廠家最為關注的關鍵點。檢測產品1、缸體、缸蓋、缸頭以及

虹科免拆診斷 | 2012 款大眾速騰車發動機偶爾抖動
。故障現象故障診斷故障排除接車后試車,確認發動機怠速偶爾抖動,且在D擋起步時抖動明顯。用故障檢測儀檢測,發動機控制單元中無故障代碼存儲;讀取發動機失火

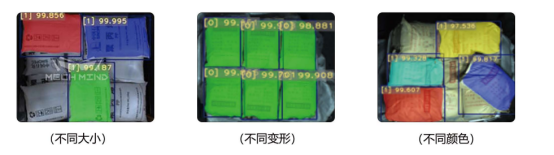
3D視覺引導的多SKU紙箱拆解
在物流和包裝行業中,處理多種SKU紙箱的拆解是一個常見的操作難題。傳統方法往往因為紙箱的尺寸、形狀和重量多樣性而遇到困難。為了解決這個問題,富唯智能提出了一種基于3D視覺引導的SKU紙箱拆解解
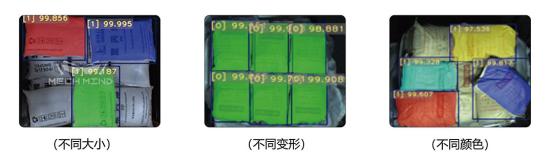
紙箱的拆碼垛,3D視覺引導機器人無序抓取
在繁忙的物流倉庫中,紙箱的拆碼垛工作常常讓人頭疼不已。但是,現在有了富唯智能的3D視覺引導紙箱拆碼垛解決方案,這一切都變得輕松簡單!
汽車發動機上的電控技術主要包括什么
汽車發動機上的電控技術主要包括以下幾個方面: 電控燃油噴射系統(EFI) 電控燃油噴射系統是一種通過電子控制單元(ECU)來控制燃油噴射量的系統。它可以根據發動機的運行狀態,如轉速、負荷、溫度等
3D視覺引導方案解決工廠產線上下料難題
3D視覺引導方案,下料器的擺放精度直接關系到產品的最終質量和生產效率。如何在繁忙的生產線上,確保下料器能夠精準無誤地將工件放置在指定位置,成為了擺在我們面前的一大挑戰。今天,我們就來揭
3D視覺技術無序抓取引導活塞桿
隨著工業4.0時代的到來,智能制造成為工業發展的重要趨勢。作為智能制造的關鍵技術之一,3D視覺技術在活塞桿抓取領域的應用前景十分廣闊。

解決方案|3D視覺引導多SKU紙箱混拆
在物流和包裝行業,紙箱混拆是常見的作業需求。然而,由于紙箱的多樣性(如尺寸、形狀和重量),傳統的方法往往難以應對。針對這一背景,富唯智能提出了基于3D視覺引導SKU紙箱的
解決方案|基于3D視覺技術的鋁合金板件刷油烘干自動化上下料
針對鋁合金板件刷油烘干上下料過程中的自動化需求,我們提出了一套基于3D視覺引導的解決方案。該方案通過引入先進的
富唯智能案例|3D視覺引導機器人抓取鞋墊上下料
隨著制造業對自動化、智能化需求的不斷提升,如何實現鞋墊上下料的精準、高效操作成為了企業亟待解決的問題。傳統的上下料方式往往依賴人工,存在效率低下、精度不足等問題。而富唯智能的3D視覺引導機器人


3D視覺引導3C薄片自動化上料
3D視覺引導3C薄片自動化上料 在當今高度自動化的制造環境中,精確、高效地處理薄片類零件至關重要。特別是在3C行業,如手機、電腦等產品的制

發動機內部構造解析
現代汽車發動機機體組主要由機體、氣缸蓋、氣缸蓋罩、氣缸襯墊、主軸承蓋以及油底殼等組成。機體組是發動機的支架,是曲柄連桿機構、配氣機構和發動機各系統主要零部件的裝配基體。氣缸蓋用來封閉氣






 工商網監
工商網監
評論