 劃重點!必須了解的工業相機入門級知識
劃重點!必須了解的工業相機入門級知識
01分辨率
相機每次采集圖像的像素點數,一般對應于光電傳感器靶面排列的像元數,如1920*1080。分辨率決定了位圖圖像細節的精細程度。通常情況下,圖像的分辨率越高,所包含的像素就越多,圖像就越清晰。同時,也會增加文件占用的存儲空間。
02像素深度
像素深度是指存儲每個像素所用的位數,常見的是8bit,10bit,12bit。像素深度決定彩色圖像的每個像素可能有的顏色數,或者確定灰度圖像的每個像素可能有的灰度級數。像素位數越多,它能表達的顏色數目就越多,深度就越深。
分辨率和像素深度共同決定了圖像的大小。例如對于像素深度為8bit的500萬像素圖像,則整張圖片應該有500萬*8/1024/1024=38M(1024Byte=1KB,1024KB=1M)。增加像素深度可以增強測量的精度,但同時也降低了系統的速度,并且提高了系統集成的難度(線纜增加,尺寸變大等)。
03最大幀率/行頻
即相機采集傳輸圖像的速率,對于面陣相機一般為每秒采集的幀數(Frames/Sec),對于線陣相機為每秒采集的行數(HZ)。
04曝光方式和快門速度
工業線陣相機都是逐行曝光的方式,可以選擇固定行頻和外觸發同步的方式,曝光時間可以與行周期一致,也可以設定一個固定的時間;面陣相機有幀曝光、場曝光和滾動曝光幾種常見方式,工業相機一般都提供外觸發采圖的功能,快門速度一般可到10ms,高速相機還會更快。
05像元尺寸
即一個像元的大小。像元大小和像元數(分辨率)共同決定了相機靶面的大小。目前工業相機像元尺寸一般為3μm~10μm,一般像元尺寸越小,制造難度越大,圖像質量也越不容易提高。
06光譜響應特性
是指該像元傳感器對不同光波的敏感特性,一般響應范圍為350nm~1000nm,一些相機在靶面前加一個濾鏡,濾除紅外線,如果系統需要對紅外感光時可去掉該濾鏡。
07工業相機噪聲
工業相機的噪聲是指成像過程中不希望被采集到的,實際成像目標之外的信號。總體上分為兩類,一類是由有效信號帶來的散粒噪聲,這種噪聲對任何相機都存在;另一類是相機本身固有的與信號無關的噪聲。它是由于圖像傳感器讀出電路、相機信號處理與放大電路帶來的固有噪聲,每臺相機的固有噪聲都不一樣。
08信噪比
相機的信噪比定義為圖像中信號與噪聲的比值(有效信號平均灰度值與噪聲均方根的比值),代表了圖像的質量,圖像信噪比越高,相機性能和圖像質量越好。
如何選擇合適的工業相機
01CCD Or CMOS
CCD相機是使用CCD(電荷耦合元件)將光學影像轉化為數字信號進行傳輸的相機。CCD圖像傳感器多使用一個或少數的幾個輸出節點進行信號讀出,輸出圖像一致性高,噪聲較小,技術發展成熟。
CMOS相機是使用CMOS(互補金屬氧化物半導體)將光學影像轉化為數字信號進行傳輸的相機。CMOS相機在傳輸上是單個像素進行傳輸,因此可以做到單個像素的信號放大,圖像掃描速率極高,但是也導致信號一致性有缺陷,噪聲大,數百萬的放大器排放造成了更大的固定噪聲。
對比
1. 分辨率:CMOS的每一個像素都比CCD繁雜,像素大小難以達到CCD水準,因此同樣大小的CCD和CMOS傳感器,CCD的分辨率通常優于CMOS。同樣大小情況下CCD屏幕分辨率高過CMOS。也就是說,顯像品質優于CMOS。
2. 輸出速度:CCD需要進行逐個光敏輸出,速度較慢;CMOS多個控制器,傳輸速度快。
3. 噪音:CMOS中的每一個光感應二極管都需要放大器,以百萬像素測算,必須數百萬個放大器,但放大器歸屬于數字集成電路,因而難以維持獲得的全部結論一致。CCD只要處理芯片邊沿有放大器。與CMOS對比,噪聲相對減少了許多,圖像質量更高。
4. 靈敏度:CMOS信號要以點為單位的電荷信號,CCD要以行為單位的電流信號,載入信號時CMOS是點立即載入信號,CCD是行間接性載入信號,因而,假如像素大小相同,CMOS敏感度小于CCD。
5. 功耗:CCD輸出帶寬較寬,功耗也更大;CMOS單個輸出點的帶寬要求低,功耗會更小。同時CMOS只在電路接通時會耗電,CCD則會一直耗電。
6. 成本:CCD電路和器件是集成在半導體單晶材料上,制造工藝要求較高,在制作中的報損率比較高,因此生產成本高。CMOS集成在被稱作金屬氧化物的半導體材料上,這一工藝運用比較廣泛,量產難度較小,因此生產成本相對低。
CCD在圖像質量、屏幕分辨率、精確度、噪聲等層面優于CMOS,但CMOS的特點是成本低、功耗低和高集成度。現在CCD和CMOS技術飛速發展,差異將逐步降低。在對成像質量要求更高的機器視覺領域目前使用更為普遍的還是CCD相機。但CMOS發展勢頭猛烈,高端CMOS相機目前的成像效果已經逐漸追趕上CCD相機。
在進行選擇時,要根據自己的需求,在成像效果、功耗、采購成本、可選用配件等方面進行取舍。
02合適的分辨率
根據目標的要求精度,反推出相機的像素精度。相機單方向分辨率=單方向視野范圍除以理論精度。
例如對視野大小為10*10mm的場合,要求精度為0.02mm/pixel,則方向上分辨率=10/0.02=500。然而考慮到相機邊緣視野的畸變以及系統的穩定性要求,一般不會只用一個像素單位對應一個測量精度值,一般選擇倍數為4或者更高,這樣相機單方向分辨率為2000,相機的分辨率=2000*2000=400萬,所以選用500萬像素的相機即可滿足。
03足夠的相機幀率
當被測物體有運動要求時,要選擇幀數較高的工業相機,一般來說分辨率越高,幀數越低。
04合適的鏡頭
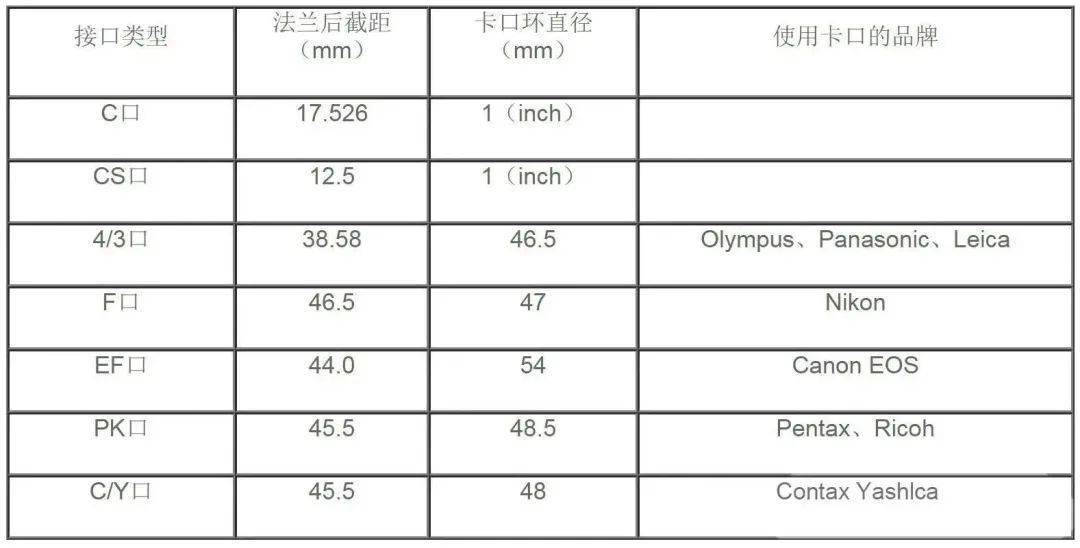
選擇鏡頭的支持CCD尺寸要大于等于相機CCD傳感器芯片的尺寸,另外安裝座是C、CS或F型接口也要匹配,同時考慮鏡頭的工作距離,是否留有足夠空間等。
另外51camera官網的“產品選型助手”可自助進行選型。通過選擇相機類型,輸入相應數值,系統即可自動計算出適合你的相機款型,簡單快捷。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2541文章
49961瀏覽量
747524 -
CCD
+關注
關注
32文章
870瀏覽量
141863 -
分辨率
+關注
關注
2文章
1008瀏覽量
41736 -
工業相機
+關注
關注
5文章
296瀏覽量
23437
發布評論請先 登錄
相關推薦
Dragonfly S 5MP工業相機量產 機器視覺應用的新選擇

TSN時間敏感網絡技術入門級解決方案TSN?BasicSolution
凌科LP16 Type-C3.1系列工業級連接器工業相機應用案例解析
低成本入門級MCU如何滿足您的系統要求
IBM發布全新入門級全閃存存儲平臺
AMD發布銳龍7 8700F、銳龍5 8400F無核顯入門級游戲處理器

入門級64位ARM?CORTEX?-A55 MPU數據手冊

三星將在今年推出一款入門級Galaxy Z Fold 6折疊屏手機
季豐電子極速封裝線磨劃能力介紹

『這個知識不太冷』了解 RF 前端和濾波器

淺談工業相機的不同接口








 工商網監
工商網監
評論