") STM32基礎(chǔ)知識:定時器輸入捕獲功能
STM32基礎(chǔ)知識:定時器輸入捕獲功能
定時器輸入捕獲功能
1 輸入捕獲功能概述
1.1 輸入捕獲功能的用途和工作原理
- 用途:用于測量信號的參數(shù),比如周期和頻率。
- 工作原理:在輸入捕獲模式下,當捕獲單元捕捉到外部信號的有效邊沿(上升沿/下降 沿/雙邊沿)時,將計數(shù)器的當前值鎖存到捕獲/比較寄存器TIMx_CCR, 供用戶讀取。
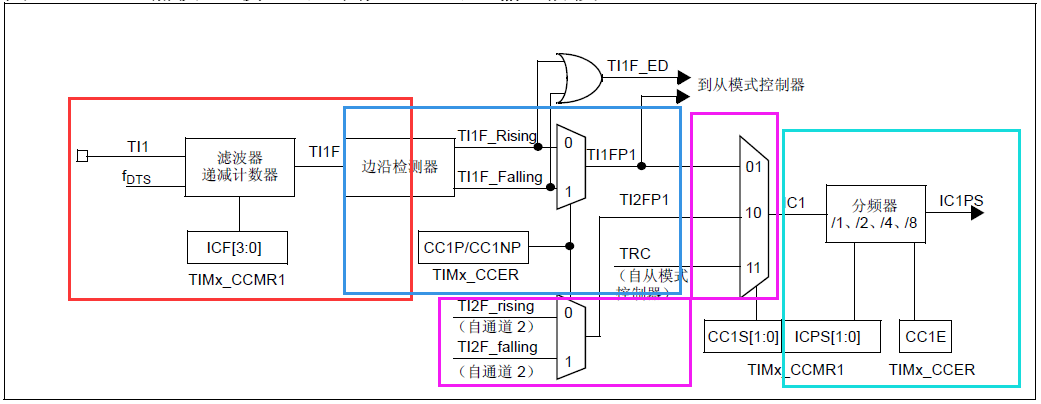
1.2 捕獲通道的內(nèi)部結(jié)構(gòu)


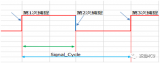
1.3 捕獲過程示意圖


將兩次捕獲值相減,再乘以計數(shù)時間可計算出信號周期
1.4 信號參數(shù)計算公式
信號參數(shù)計算公式
周期
頻率
當待測信號不大于定時器的一個完整計數(shù)周期(從0到ARR)時。假設(shè)兩次連續(xù)的捕獲值分別為CCRx_1 和 CCRx_2,則捕獲差值可以按照如下方法計算:
- 如果 CCRx_1 < CCRx_2:捕獲差值 = CCRx_2 - CCRx_1
- 如果 CCRx_1 > CCRx_2:捕獲差值 = (ARR + 1 - CCRx_1) + CCRx_2
注意:如果待測信號大于定時器的一個完整計數(shù)周期,則需要結(jié)合定時器的更新中斷次數(shù)來計算捕獲差值。
1.5 輸入捕獲功能的數(shù)據(jù)類型和接口函數(shù)

成員變量ICPolarity的取值范圍
| 宏常量定義 | 含義 |
|---|---|
| TIM_ICPOLARITY_RISING | 上升沿捕獲 |
| TIM_ICPOLARITY_FALLING | 下降沿捕獲 |
| TIM_ICPOLARITY_BOTHEDGE | 雙邊沿捕獲 |
成員變量ICSelection的取值范圍
| 宏常量定義 | 含義 |
|---|---|
| TIM_ICSELECTION_DIRECTTI | 直接輸入模式:捕獲通道CH1和CH2分別與IC1和IC2連接.捕獲通道CH3和CH4分別與IC3和IC4連接. |
| TIM_ICSELECTION_DIRECTT2 | 間接輸入模式:捕獲通道CH1和CH2分別與IC2和IC1連接.捕獲通道CH3和CH4分別與IC4和IC3連接. |
| TIM_ICSELECTION_TRC | 選擇從模式管理器的觸發(fā)信號TRC 作獲信號. |
成員變量ICPrescaler的取值范圍
| 宏常量定義 | 含義 |
|---|---|
| TIM_ICPSC_DIV1 | 檢測到輸入信號的每1個有效邊沿觸發(fā)1次捕獲 |
| TIM_ICPSC_DIV2 | 檢測到輸入信號的每2個有效邊沿觸發(fā)1次捕獲 |
| TIM_ICPSC_DIV3 | 檢測到輸入信號的每4個有效邊沿觸發(fā)1次捕獲 |
| TIM_ICPSC_DIV4 | 檢測到輸入信號的每8個有效邊沿觸發(fā)1次捕獲 |
輸入捕獲啟動函數(shù):
HAL_TIM_IC_Start_IT函數(shù)原型 uint32_t HAL_TIM_IC_Start_IT(TIM_HandleTypeDef *htim, uint32_t Channel)功能描述 用于在中斷方式下啟動定時器的輸入捕獲功能 入口參數(shù) htim:定時器句柄的地址Channel:定時器通道號,取值范圍是TIM_CHANNEL_1~TIM_CHANNEL_4 返回值 HAL狀態(tài)值 注意事項 1. 該函數(shù)在定時器初始化完成之后調(diào)用2. 函數(shù)需要由用戶調(diào)用,用于使能定時器的捕獲中斷,并啟動定時器運行 輸入捕獲停止函數(shù):
HAL_TIM_IC_Stop_IT函數(shù)原型 HAL_StatusTypeDef HAL_TIM_IC_Stop_IT(TIM_HandleTypeDef *htim, uint32_t Channel)功能描述 用于停止在中斷方式下定時器的輸入捕獲功能 入口參數(shù) htim:定時器句柄的地址Channel:定時器通道號,取值范圍是TIM_CHANNEL_1~TIM_CHANNEL_4 返回值 HAL狀態(tài)值 注意事項 1. 該函數(shù)需要由用戶調(diào)用,用于禁止捕獲中斷,關(guān)閉輸入捕獲通道,停止 定時器運行 輸入捕獲中斷回調(diào)函數(shù):
HAL_TIM_IC_CaptureCallback函數(shù)原型 void HAL_TIM_IC_CaptureCallback (TIM_HandleTypeDef *htim)功能描述 用于處理所有定時器的輸入捕獲中斷,用戶在該函數(shù)內(nèi)編寫實際的任務(wù)處理程序 入口參數(shù) htim:定時器句柄的地址 返回值 無 注意事項 1. 該函數(shù)由定時器中斷通用處理函數(shù)HAL_TIM_IRQHandler調(diào)用,完成所 有定時器輸入捕獲中斷的任務(wù)處理2. 函數(shù)內(nèi)部需要根據(jù)定時器句柄的實例來判斷是哪一個定時器的哪一個通道 產(chǎn)生的本次輸入捕獲中斷3. 函數(shù)由用戶根據(jù)具體的處理任務(wù)編寫 捕獲值讀取函數(shù):
HAL_TIM_ReadCapturedValue函數(shù)原型 uint32_t HAL_TIM_ReadCapturedValue(TIM_HandleTypeDef *htim, uint32_t Channel)功能描述 用于處理所有定時器的輸入捕獲中斷,用戶在該函數(shù)內(nèi)編寫實際的任務(wù)處理程序 入口參數(shù) htim:定時器句柄的地址Channel:定時器通道號,取值范圍是TIM_CHANNEL_1~TIM_CHANNEL_4 返回值 捕獲值 注意事項 1. 函數(shù)需要由用戶調(diào)用,用于讀取發(fā)生捕獲時的捕獲值 捕獲邊沿設(shè)置函數(shù):
__HAL_TIM_SET_CAPTUREPOLARITY函數(shù)原型 __HAL_TIM_SET_CAPTUREPOLARITY(__HANDLE__, __CHANNEL__, __POLARITY__功能描述 用于設(shè)置輸入信號的捕獲邊沿 入口參數(shù) HANDLE :定時器句柄的地址__Channel__:定時器通道號, 取值范圍是TIM_CHANNEL_1~TIM_CHANNEL_4__POLARITY__ :捕獲邊沿, 取值范圍是TIM_INPUTCHANNELPOLARITY_RISING/FALLING/BOTHEDGE 返回值 無 注意事項 1. 該函數(shù)是宏函數(shù),進行宏替換,不發(fā)生函數(shù)調(diào)用2. 函數(shù)需要由用戶調(diào)用,用于設(shè)置輸入信號的有效捕獲邊沿
2 任務(wù)實踐
利用定時器2的通道1(對應引腳PA0)來測量一個外部脈沖信號的周期和頻率,外部脈沖信號利用引腳PA6輸入。
- 配置定時器2時鐘源為內(nèi)部時鐘源(8MHz),通道一為輸入捕獲方式。
配置時基單元- 預分頻系數(shù)PSC為0,即計數(shù)時鐘CK_CNT為8MHz,便于擴大測量頻率的范圍。
- 設(shè)置自動重載值A(chǔ)RR為最長的計數(shù)周期,便于擴大測量頻率的脈寬。
配置輸入捕獲通道采用默認參數(shù)
- 捕獲有效邊沿為上升沿
- 捕獲通道為直接輸入方式
- 捕獲信號不分頻
- 捕獲信號不進行濾波

使能定時器2的全局中斷,中斷優(yōu)先級使用默認值

- 配置定時器3時鐘源為內(nèi)部時鐘源(8MHz),通道一為PWM輸出模式。
設(shè)置預分頻系數(shù)PSC為399,自動重載值 ARR為199,表示PWM信號的周期為10ms。
設(shè)置捕獲/比較值CRR為100, 表示PWM信號的占空比為50%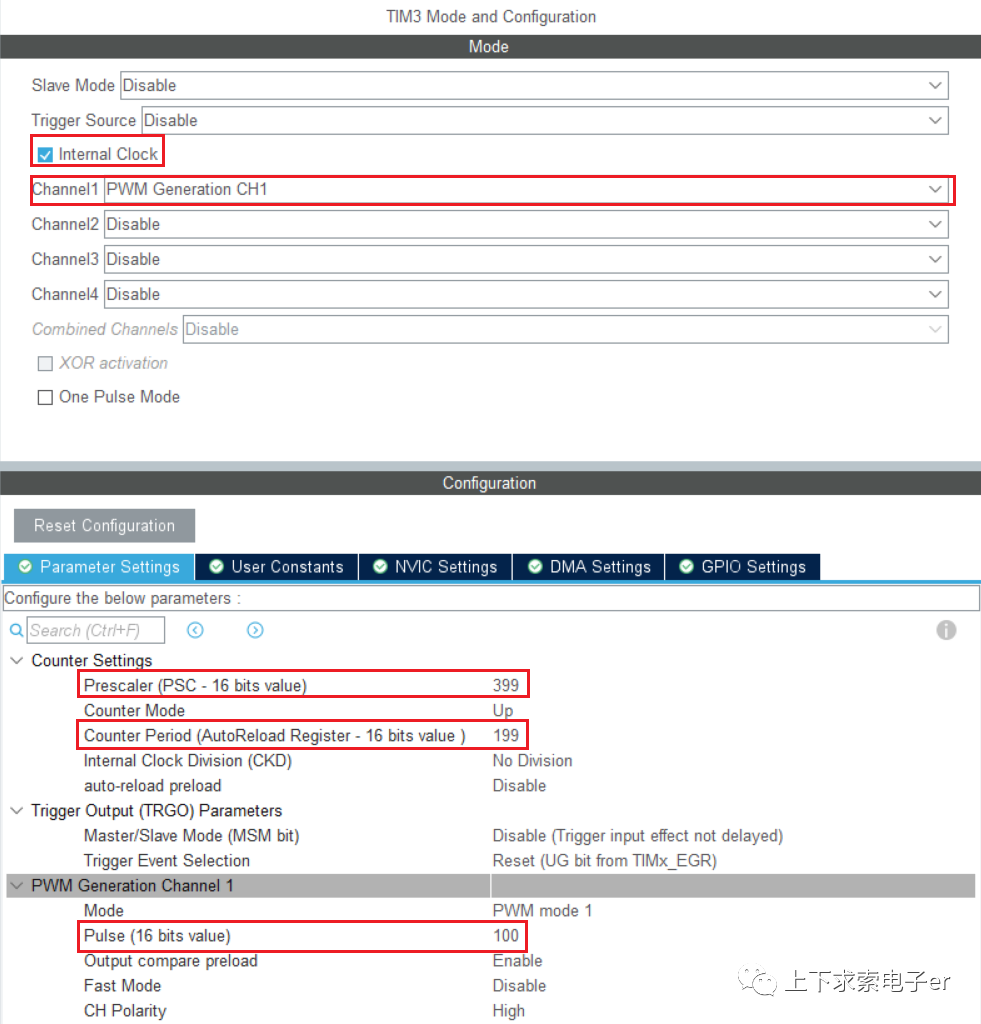
- 打開串口USART1,并在工程中添加頭文件和prinrf函數(shù)重定義,Keil中勾選USE MicroLIB。
在CubeMX中配置串口,在Keil中使用“Use MicroLIB”并在代碼中重定向printf函數(shù)的方法在STM32基礎(chǔ):定時器的定時計數(shù)功能中有詳細講解。 - 編寫程序
/* USER CODE BEGIN PV */ uint32_t Diff = 0; // 存放捕獲差值 uint32_t Period = 0; // 存放計算所得周期 uint8_t MeasureFlag = 0; // 測量完成標志: 0表示未完成, 1表示完成 uint8_t CapIndex = 0; // 捕獲指示: 0表示沒有開始捕獲, 1表示完成一次捕獲 uint32_t CapVal1 = 0; // 存放第一次捕獲值 uint32_t CapVal2 = 0; // 存放第二次捕獲值 /* USER CODE END PV */ /* USER CODE BEGIN 2 */ printf("Timer Capture Function Test: n"); HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); /* USER CODE END 2 */ /* USER CODE BEGIN 3 */ if(MeasureFlag == 1) { if(CapVal2 >= CapVal1) { Diff = CapVal2 - CapVal1; } else { Diff = ((65535 + 1 - CapVal1) + CapVal2) ; } } Period = Diff/20000; printf ("Period is: %.4fmsrn", Diff/20000.0); printf ("Frequency is: %dHzrn", 8000000/Period); printf ("/*****************************/rn"); MeasureFlag = 0; HAL_Delay(1000); HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); } /* USER CODE END 3 */ /* USER CODE BEGIN 4 */ int fputc (int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY); return ch; } int fgetc(FILE *f) { uint8_t ch = 0; HAL_UART_Receive(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY); return ch; } void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) { if (htim- >Instance == TIM2) { if (htim- >Channel == HAL_TIM_ACTIVE_CHANNEL_1) { if (CapIndex == 0) { CapVal1 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); CapIndex = 1; } if (CapIndex == 1) { CapVal2 = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1); CapIndex = 0; MeasureFlag = 1; } else { Error_Handler(); } } } } /* USER CODE END 4 */
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
寄存器
+關(guān)注
關(guān)注
31文章
5325瀏覽量
120052 -
STM32
+關(guān)注
關(guān)注
2266文章
10876瀏覽量
354925 -
計數(shù)器
+關(guān)注
關(guān)注
32文章
2254瀏覽量
94371 -
定時器
+關(guān)注
關(guān)注
23文章
3241瀏覽量
114514
發(fā)布評論請先 登錄
相關(guān)推薦
定時器基礎(chǔ)知識
目錄:一、定時器基礎(chǔ)知識二、基本定時器(TIM6和TIM7)三、通用定時器(TIM2~TIM6)1.功能特點2.時鐘源3.時基單元4.
發(fā)表于 08-09 07:30
STM32 --通用定時器輸入捕獲功能 精選資料推薦
問題:開始的時候沒有搞清楚 定時器時基 于 定時器溢出中斷導致在計算的時候一直有問題。開始并沒有懷疑是配置有問題,因為之前接觸過定時器輸入捕獲
發(fā)表于 08-19 06:34
從應用方面詳解STM32的定時器輸入捕獲模式
從應用來說STM32的定時器輸入捕獲模式前言原理輸入捕獲初始化程序中斷函數(shù)和處理函數(shù)前言我們知道
發(fā)表于 01-06 07:37
stm32定時器輸入捕獲
不同頻率、不同占空比的方波信號、PWM信號,同時做為輸入捕獲功能時,可以測量脈沖寬度、實現(xiàn)電容按鍵檢測等等。 一、輸入捕獲概念
發(fā)表于 10-13 09:13
?2.4w次閱讀
基于STM32定時器捕獲測量脈寬的應用示例
我們知道,利用單片機定時器捕獲功能測量脈沖信號寬度及占空比是種很常見的做法。這里以STM32的定時器為例來介紹基于其
STM32CubeMX——定時器輸入捕獲
通用定時器在基本定時器的基礎(chǔ)上增加了一個外部引腳,可以實現(xiàn)輸入捕獲與輸出比較等功能。高級定時器T
發(fā)表于 12-02 14:06
?9次下載

STM32定時器輸入捕獲實驗
概述輸入捕獲模式可以用來測量脈沖寬度或者測量頻率。STM32 的定時器,除了 TIM6 和 TIM7,其他定時器都有
發(fā)表于 12-14 18:58
?20次下載
stm32捕獲占空比_【話說定時器系列】之六:STM32定時器輸入捕獲話題
TIMER 的基本應用原理、常規(guī)應用等。現(xiàn)在將課程內(nèi)容整理為文章,針對STM32定時器有基本了解的用戶,分享具體的應用實現(xiàn)環(huán)節(jié)及常見問題解決。STM32定時器除了基本計數(shù)
發(fā)表于 12-27 19:02
?2次下載
stm32捕獲占空比_「話說定時器系列」之六:STM32定時器輸入捕獲話題
TIMER 的基本應用原理、常規(guī)應用等。現(xiàn)在將課程內(nèi)容整理為文章,針對STM32定時器有基本了解的用戶,分享具體的應用實現(xiàn)環(huán)節(jié)及常見問題解決。STM32定時器除了基本計數(shù)
發(fā)表于 12-27 19:02
?8次下載
通用定時器的輸入捕獲實驗
STM32的輸入捕獲,簡單的說就是通過檢測TIMx_CHx(定時器X的通道X)上的邊沿信號,在邊沿信號發(fā)生跳變(上升沿/下降沿)的時候,將定時器
發(fā)表于 01-12 19:53
?9次下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論