") 簡述控制器的多種工作模式
簡述控制器的多種工作模式
引言:和降壓控制器類似,升壓控制器也有多種工作模式,在中/重負(fù)載模式工作時,控制器以固定頻率連續(xù)規(guī)律工作,在輕載模式下則有多種模式可選,本節(jié)簡述控制器的多種工作模式和其多相使用方式。
1.工作模式
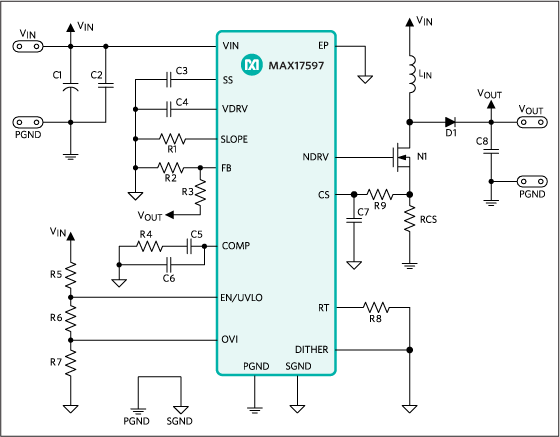
控制器輕載工作模式支持在低負(fù)載電流下進(jìn)入高效的突發(fā)、恒定頻率、脈沖跳躍和連續(xù)傳導(dǎo)(BCM,PSM,CCM)模式,要選擇模式,可以查看控制器說明配置外圍引腳。
BCM:突發(fā)模式,在開關(guān)周期內(nèi),電感電流總會到0,意味著電感被適當(dāng)?shù)亍皬?fù)位”,即功率開關(guān)閉合時,電感電流為零。
突發(fā)模式比較器控制開關(guān)管工作,開關(guān)管工作的時間很短,停止工作的時間很長,極大的降低了開關(guān)損耗,在此期間,芯片內(nèi)部的許多功能停止工作,減小內(nèi)部靜態(tài)電流的消耗,因此提高了系統(tǒng)的效率。另一方面由于開關(guān)管停止工作的時間很長,輸出電容將維持輸出的負(fù)載的能量,輸出電容的電壓降低幅度較大,因此輸出電容的紋波電壓大,即輸出的紋波電壓大。突發(fā)工作模式比較器的上下門限電壓決定了輸出電壓紋波值。
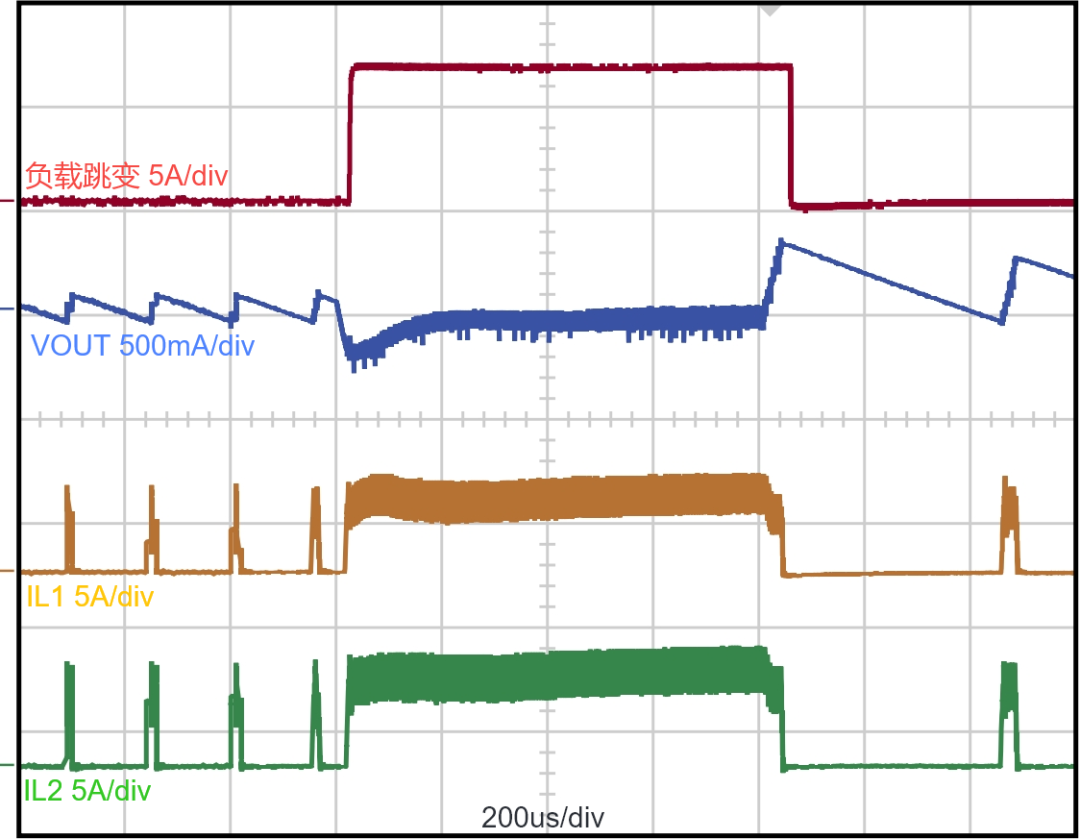
圖5-1:12V->24V; Load=500mA->7A;突發(fā)模式BM
PSM:為了維持輸出電壓的調(diào)節(jié),開關(guān)管的開通時間將減小,直到達(dá)到控制器的最小導(dǎo)通時間。開關(guān)管的開通時間達(dá)到控制器的最小導(dǎo)通時間后,若負(fù)載電流仍然的降低,控制器就必須屏蔽掉即跳掉一些開關(guān)脈沖,以維持輸出電壓的調(diào)節(jié),這種控制方法即為脈沖跳躍模式。脈沖跳躍模式,控制器監(jiān)控電感電流,一旦檢測到電流等于0,功率開關(guān)立即閉合。當(dāng)下管的電流接近于0時,系統(tǒng)就工作在非同步的方式,也就是下管不工作,依靠下管內(nèi)部寄生的反并聯(lián)二極管,提供續(xù)流回路。控制器總是等電感電流“復(fù)位”來激活開關(guān),如果電感值電流高,而截止斜坡相當(dāng)平,則開關(guān)周期延長。
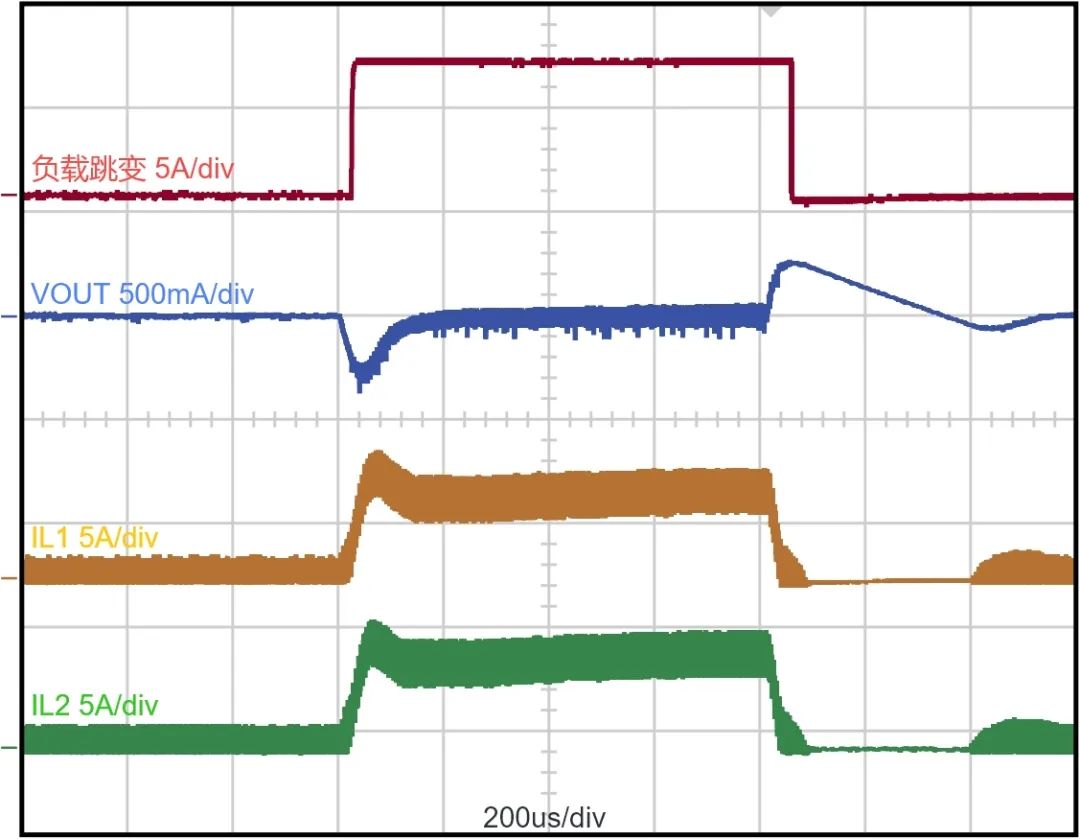
圖5-2:12V->24V;Load=500mA->7A;脈沖跳躍模式PSM
CCM:連續(xù)導(dǎo)通模式,在一個開關(guān)周期內(nèi),電感電流從不會到0,或者說電感從不“復(fù)位”,意味著在開關(guān)周期內(nèi)電感磁通從不回到0,功率管閉合時,線圈中還有電流流過。
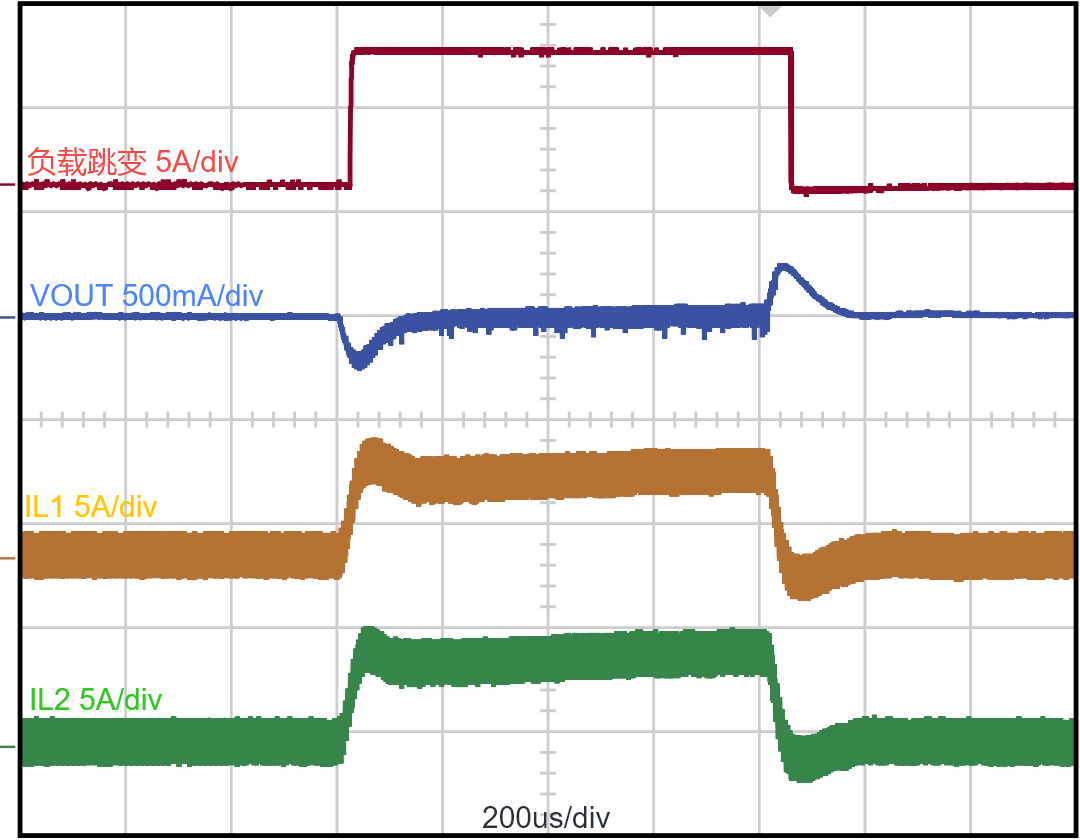
圖5-3:12V->24V; Load= 500mA->7A;強(qiáng)制連續(xù)模式CCM
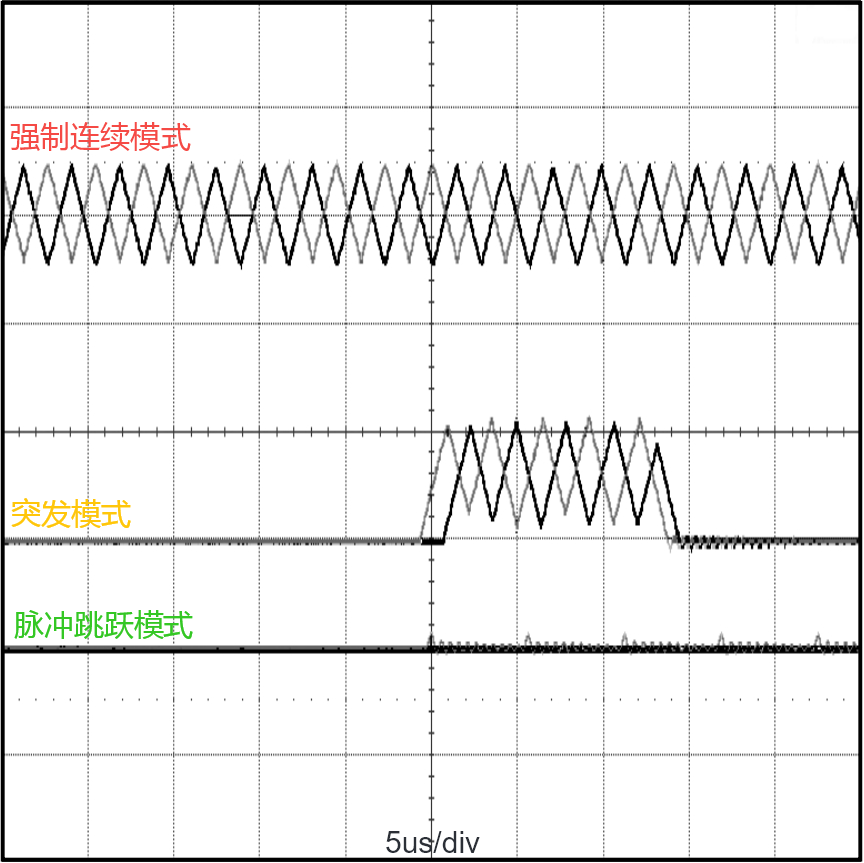
圖5-4:輕載下的電感電流(雙相);12V->24V;Load=200uA
連續(xù)工作模式下,輕載時的效率低于突發(fā)模式操作,但是連續(xù)工作具有輸出電壓波紋低、對音頻電路干擾小的優(yōu)點(diǎn),因?yàn)樗3种?dú)立于負(fù)載電流的恒頻運(yùn)行。
脈沖跳躍模式時,控制器在輕負(fù)載下以PWM脈沖跳躍模式工作。在這種模式下,恒頻運(yùn)行維持在設(shè)計(jì)最大輸出電流的大約1%以下。在非常輕的負(fù)載下,電流比較器ICMP可能在幾個周期內(nèi)保持關(guān)閉,并迫使外部底部MOSFET在相同數(shù)量的周期內(nèi)保持關(guān)閉(即跳過脈沖)。電感器的電流不允許反轉(zhuǎn),與強(qiáng)制連續(xù)操作一樣,與突發(fā)模式操作相比,具有低輸出紋波、低音頻噪聲和減少射頻干擾。它提供了比強(qiáng)制連續(xù)模式更高的低電流效率,但遠(yuǎn)不如突發(fā)模式操作高。
2.頻率選擇/同步和鎖相環(huán)
開關(guān)頻率的選擇是效率和組件大小之間的權(quán)衡,低頻工作通過減少M(fèi)OSFET開關(guān)損耗來提高效率,但需要更大的電感和/或電容來保持低輸出紋波電壓,部分控制器的開關(guān)頻率可以使用FREQ引腳進(jìn)行選擇。
當(dāng)Vin高于Vout電壓時,升壓控制器可以根據(jù)模式、電感電流和VIN電壓的不同而表現(xiàn)不同,關(guān)于這一點(diǎn),可以查看不同控制器的說明。控制器的內(nèi)部鎖相環(huán)PL,由相位頻率檢測器、低通濾波器和壓控振蕩器(VCO組成,PLL允許底部MOSFET的開啟被鎖定信號施加到180度失相位。若為雙通道,允許通道1的底部MOSFET的打開將被鎖定到施加于PLLIN/MODE引腳的外部時鐘信號的上升邊緣,因此通道2的底部MOSFET的開啟與外部時鐘失相180度。一般來說控制器只能同步到一個外部時鐘,其頻率在控制器的內(nèi)部VCO范圍內(nèi),即名義上是55kHz到1MHz,實(shí)際保證鎖定在75kHz到850kHz之間。
快速鎖相可以通過使用FREQ引腳設(shè)置一個接近期望的自用運(yùn)行同步頻率,VCO的輸入電壓在與FREQ引腳設(shè)置的頻率對應(yīng)的頻率上被預(yù)偏置。一旦預(yù)偏置,PLL只需要稍微調(diào)整頻率來實(shí)現(xiàn)鎖相和同步。雖然不要求自由運(yùn)行的頻率接近外部時鐘頻率,但這樣做避免工作頻率通過PLL鎖定偏差過大。
3.兩相單輸出工作
如圖5-5兩相單輸出轉(zhuǎn)換器,其中兩個通道的輸出連接在一起,并且兩個通道具有相同的占空比。在兩相運(yùn)行時,兩個通道運(yùn)行180度失相,這有效地交織了輸出電容器電流脈沖,大大降低了輸出電容器紋波電流,因此可以放寬對電容器的ESR的要求。由于輸出電容器中的紋波電流是一個方波,因此對輸出電容器的紋波電流的要求取決于占空比、相位數(shù)和最大輸出電流。
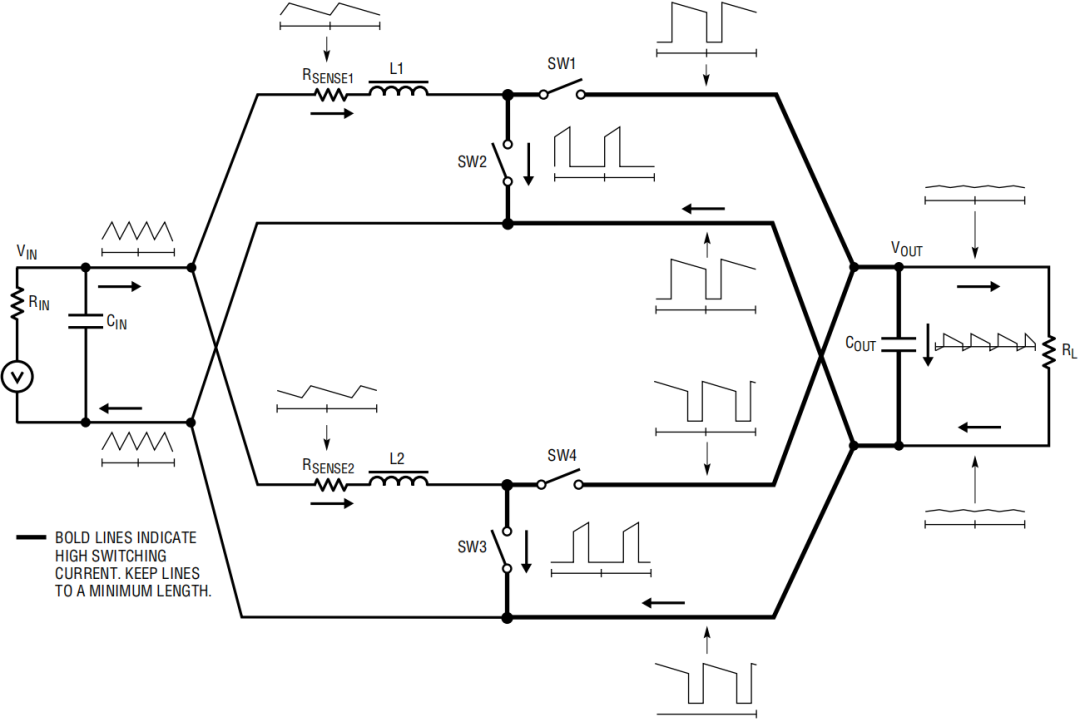
圖5-5:兩相電流波形
在兩相配置中,如圖5-6所示,歸一化輸出電容器紋波電流作為占空比的函數(shù)。要為輸出電容器選擇一個紋波電流額定值,首先根據(jù)輸出電壓和輸入電壓的范圍建立占空比范圍,選擇最壞情況下的高歸一化紋波電流作為最大負(fù)載電流的百分比。
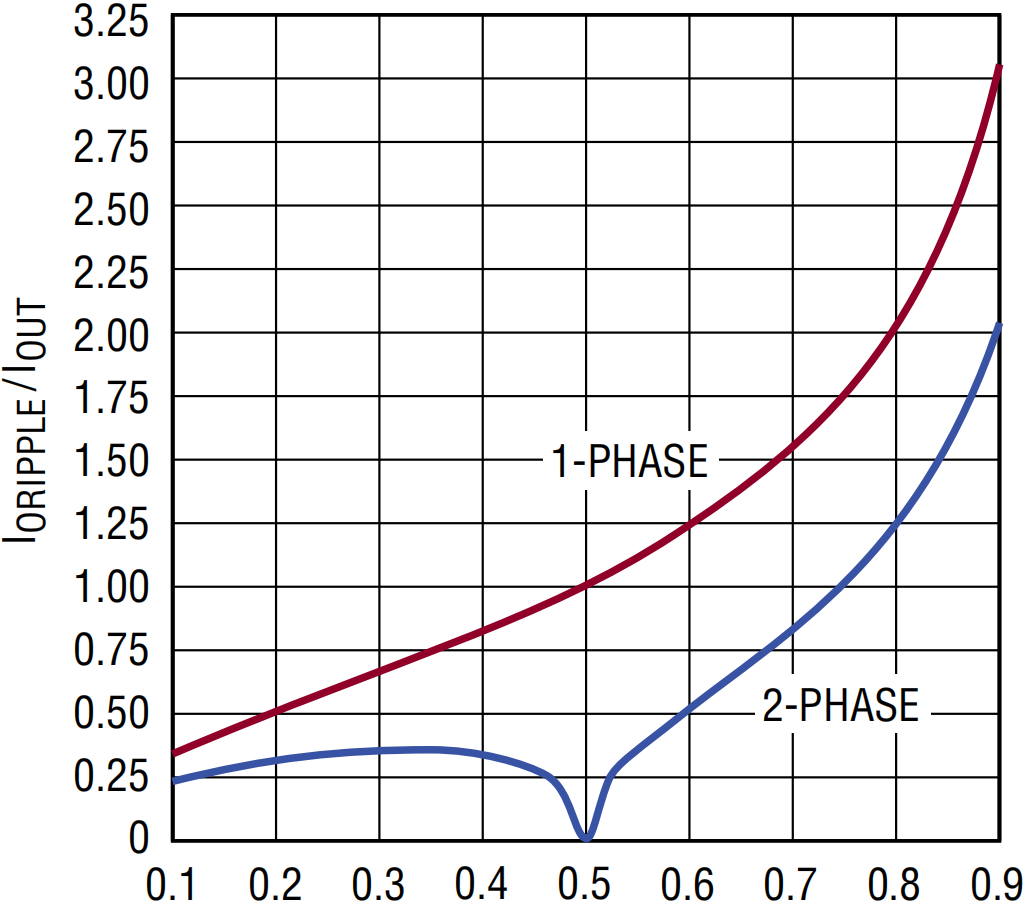
圖5-6:升壓轉(zhuǎn)換器的標(biāo)準(zhǔn)化輸出電容激波電流(RMS)
一般需要并行放置多個電容器,以滿足ESR和RM當(dāng)前的要求,固體鉭,特殊聚合物,鋁電解和陶瓷電容器都可以使用,其中陶瓷電容器具有優(yōu)良的低ESR特性,具有較高的電壓系數(shù),但單個容值有限,OS-CON和POSCAP電容器可提供低ESR和高波紋電流額定值。
4.多相操作和拓?fù)?/strong>
對于需要大電流的輸出負(fù)載,可以級聯(lián)多個控制器錯相工作,以提供更多的輸出電流,同時減少輸入和輸出電壓紋波。PLLIN/MODE引腳允許控制器與另一個控制器的CLKOUT信號同步。CLKOUT信號可以連接到以下控制器的PLLIN/MODE引腳,以排列整個系統(tǒng)的頻率和相位。用PHASMD引腳配置相位差(CH1和CH2之間)為120°、180°或240°。圖5-7至圖5-10顯示了3、4、6或12相操作所需的連接,共可以級聯(lián)12個控制器,同時錯相運(yùn)行。
當(dāng)在多個控制器控制相同輸出的多相應(yīng)用中改變輸出電壓時,需要同步所有控制器之間的變化,可以通過兩種方式來實(shí)現(xiàn):
1:使用命令為所有控制器設(shè)置一個公共地址,然后將新的輸出電壓值寫入這個公共地址,以便所有控制器同時接收新值。
2:使用組命令協(xié)議(GCP)。GCP確保所有接收到輸出更改命令的從器件同時啟動更改。
設(shè)定控制器1的兩相差240°,然后控制器2的一個相位插入0°和240°之間,形成0°/120°/240°的三相。
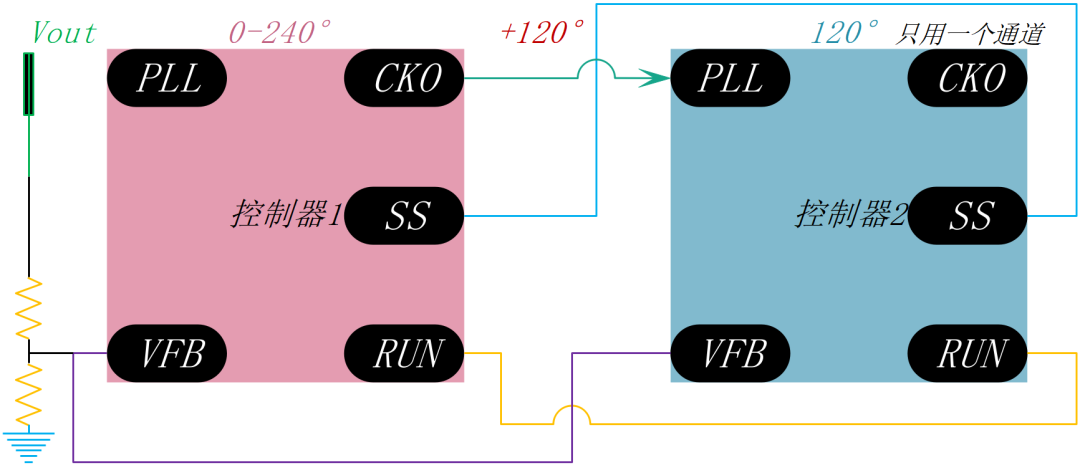
圖5-7:三相組合配置
設(shè)定控制器1的兩相為0°和180°,然后控制器2的兩相是控制器1的兩相整體加90°,形成四相。
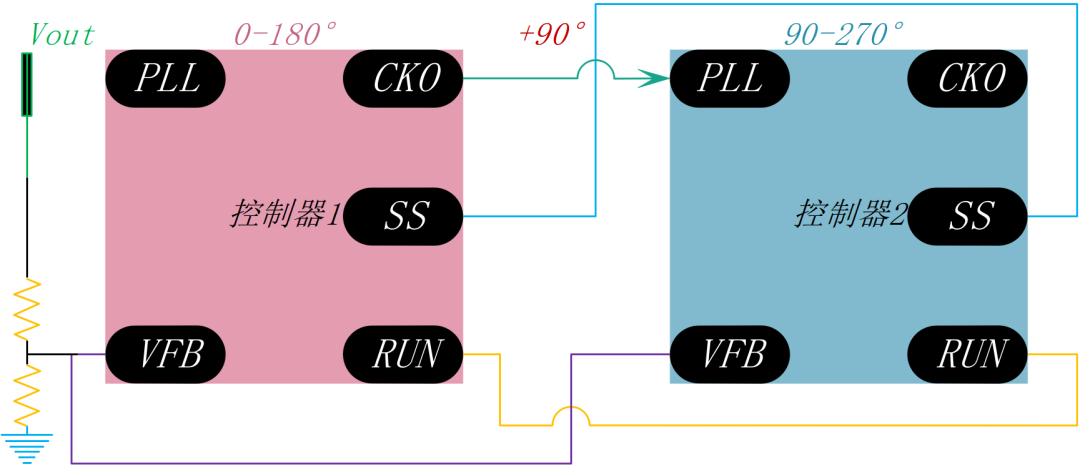
圖5-8:四相組合配置
設(shè)定控制器1的兩相為0°和180°,然后控制器2的兩相是控制器1的兩相整體加60°,最后控制器3的兩相是控制器2的兩相整體加60°,一起形成六相。
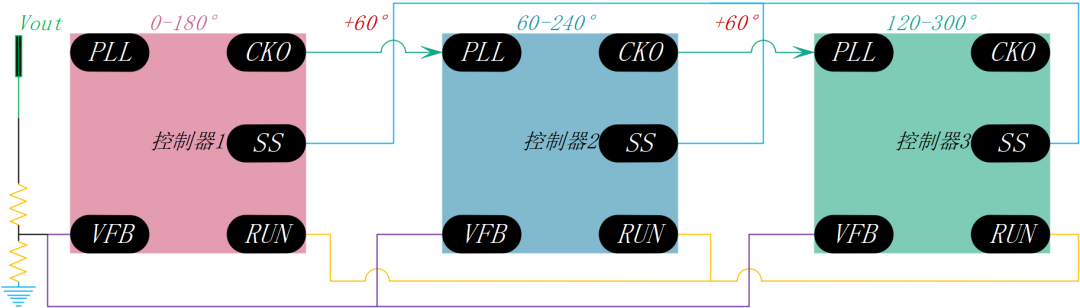
圖5-9:六相組合配置
十二相的配置如下:
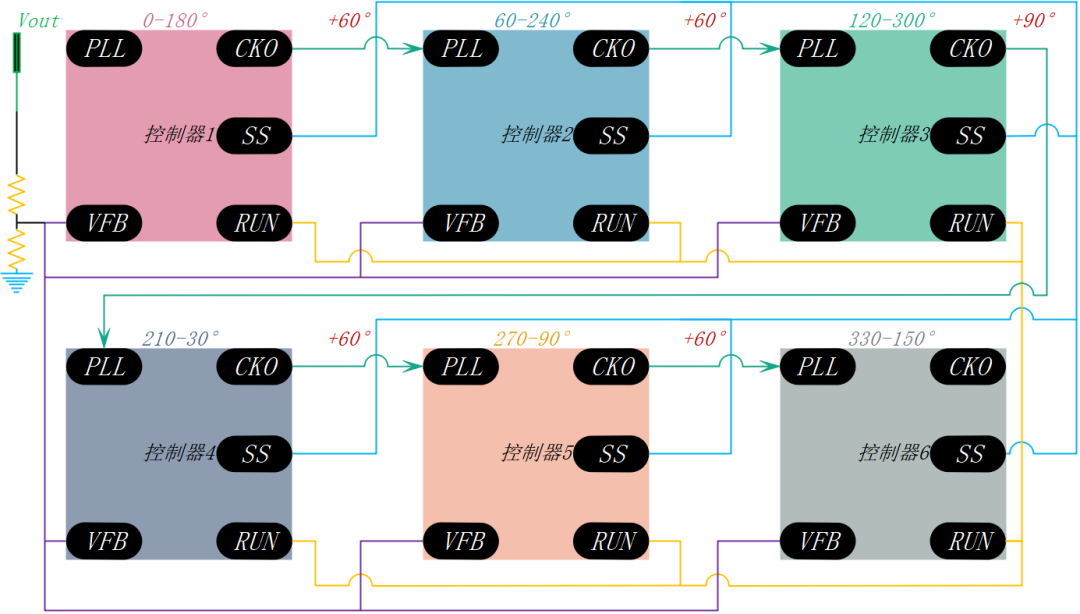
圖5-10:十二相組合配置
5.四相使用示例
如圖5-11所示是四相使用示例,四相搭配四個功率級,輸出24V-20A。
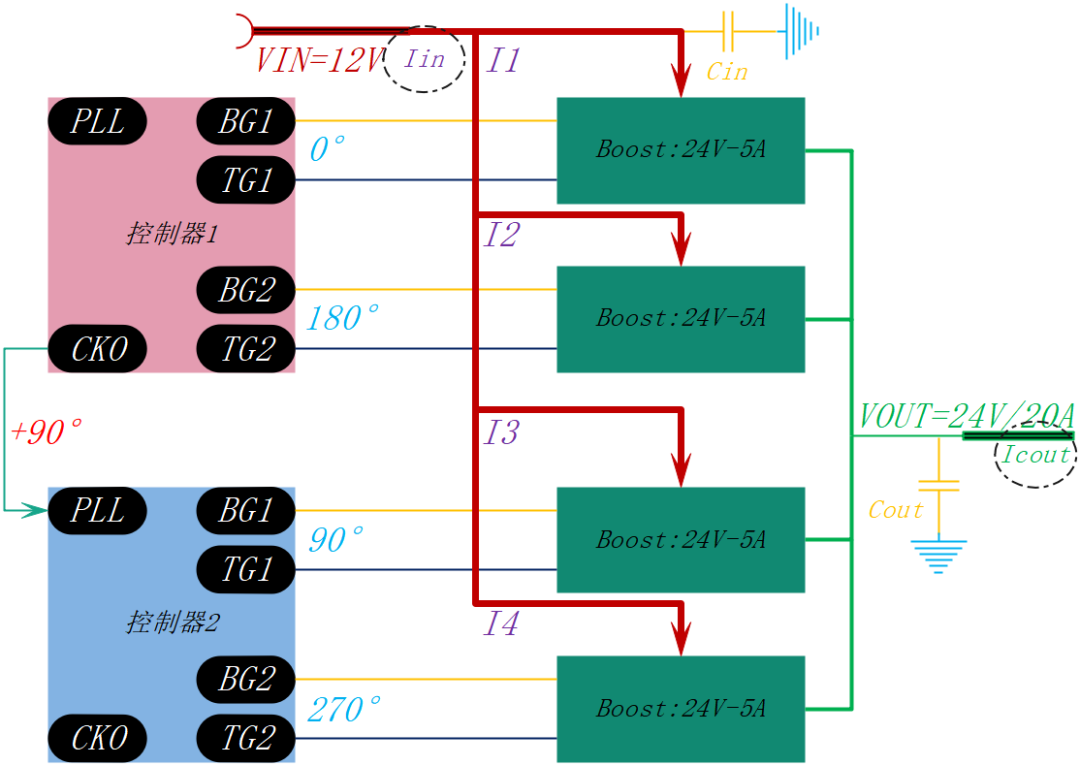
圖5-11:多相使用
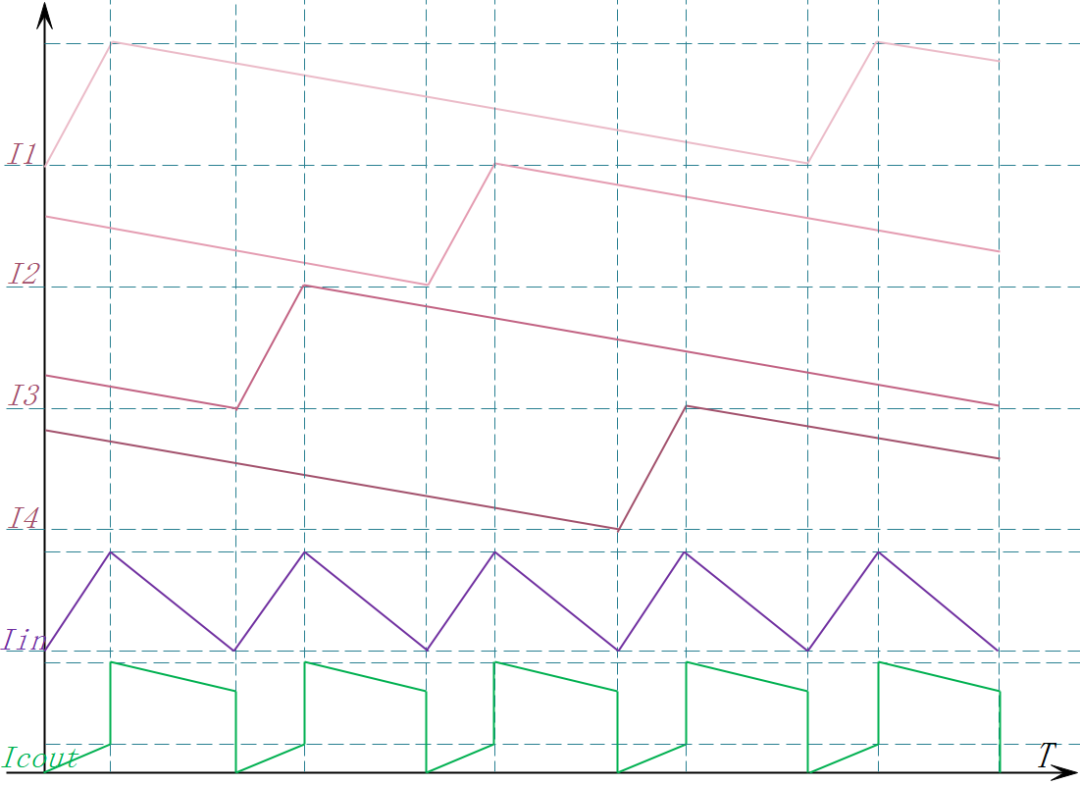
圖5-12:圖5-11的電流圖
圖5-12是圖5-11的關(guān)鍵節(jié)點(diǎn)電流波形,IL1至IL4疊加,增加了紋波頻率,但降低了輸入/輸出紋波電流的均方根值RMS,從而節(jié)省輸入/輸出電容器數(shù)量。
-
控制器
+關(guān)注
關(guān)注
112文章
16197瀏覽量
177394 -
比較器
+關(guān)注
關(guān)注
14文章
1633瀏覽量
107098 -
降壓控制器
+關(guān)注
關(guān)注
2文章
246瀏覽量
19398 -
開關(guān)管
+關(guān)注
關(guān)注
4文章
223瀏覽量
21616
發(fā)布評論請先 登錄
相關(guān)推薦
快速搞懂GPIO控制器的六種模式

8位微控制器的多種低功耗模式
智能馬達(dá)保護(hù)控制器的簡述
8位微控制器提供多種低功耗模式
適應(yīng)多種時序的DMA控制器設(shè)計(jì)

什么是運(yùn)動控制器_運(yùn)動控制器的工作原理及應(yīng)用
電機(jī)控制器工作原理及工作模式
使用峰值電流模式控制器設(shè)計(jì)升壓轉(zhuǎn)換器
無刷電機(jī)控制器和電機(jī)控制器工作原理詳解
電機(jī)控制器是如何工作的?電機(jī)控制器有哪幾種工作模式?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論