 CAN協議棧與LIN協議棧介紹
CAN協議棧與LIN協議棧介紹
CAN協議棧
汽車CAN協議棧是一種軟件組件,用于實現汽車電子系統中的CAN總線通信功能。它包含了一系列的功能軟件,用于處理CAN總線的物理層和數據鏈路層的通信協議。
汽車CAN協議棧的功能軟件主要包括以下幾個方面:
物理層驅動程序:負責與CAN總線物理層進行通信,包括發送和接收CAN消息,以及處理CAN總線的電氣特性和信號傳輸。
CAN消息處理:負責解析和封裝CAN消息,包括標識符的解析、數據的封裝和解封裝等。
錯誤檢測和處理:負責檢測和處理CAN總線上的錯誤,包括位錯誤、幀錯誤、CRC錯誤等,以確保數據的可靠性和完整性。
時序控制:負責控制CAN消息的發送和接收時序,包括幀的發送間隔、幀的優先級等。
網絡管理:負責管理CAN總線上的節點和網絡拓撲,包括節點的加入和退出、節點的狀態管理等。
診斷和故障處理:負責診斷CAN總線上的故障和錯誤,并提供相應的故障處理機制,以保證系統的可靠性和穩定性。
汽車CAN協議棧是實現汽車CAN總線通信功能的關鍵軟件組件,它提供了一系列的功能軟件,用于處理CAN總線的物理層和數據鏈路層的通信協議,以實現可靠和高效的汽車電子系統通信。
2.2.2 LIN協議棧
汽車LIN協議棧是用于實現LIN總線通信的軟件組件集合。它包含了實現LIN協議的各個層次的功能軟件,以便實現LIN總線的通信和控制。
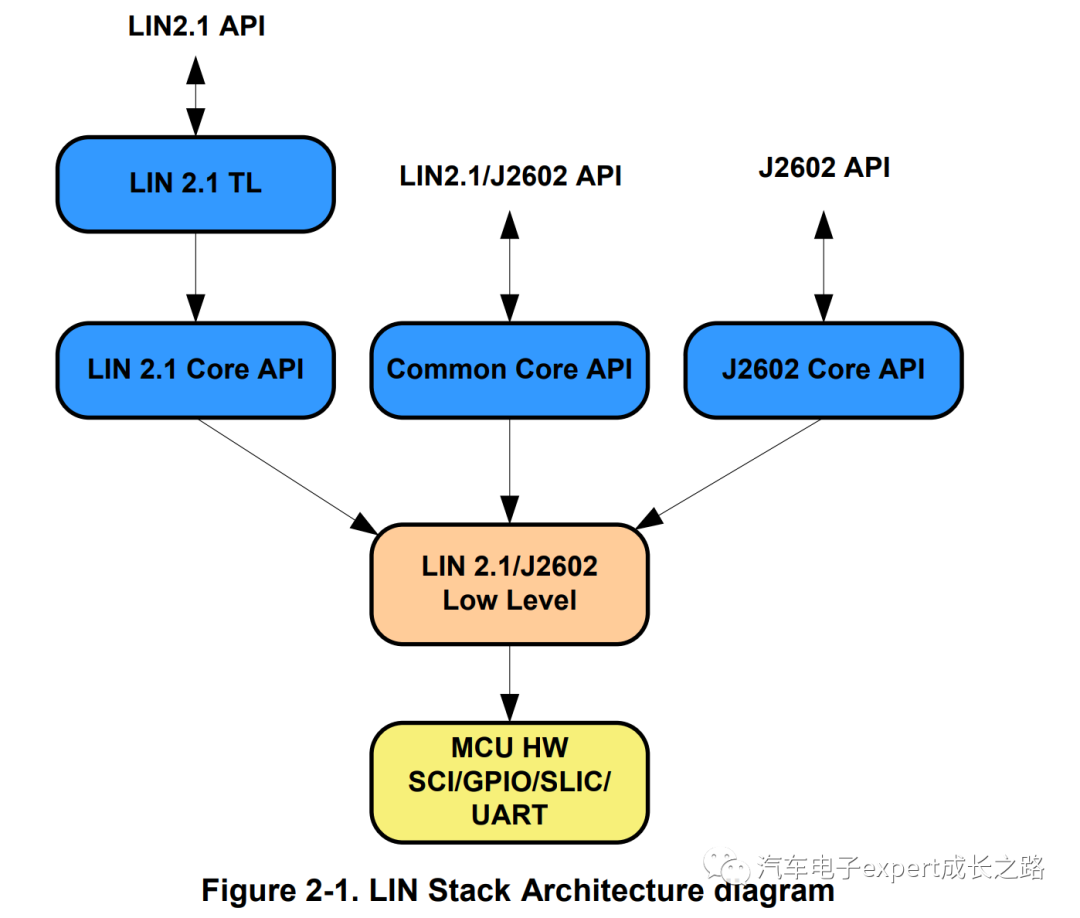
汽車LIN協議棧通常包含以下功能軟件:
物理層驅動:負責將MCU的串行通信模塊輸出的信號轉換為LIN總線的電平信號,并提供LIN總線的電氣特性要求的支持。
LIN協議棧:實現了LIN協議的各個層次,包括幀封裝、幀解析、錯誤檢測和糾正、幀發送和接收等功能。
LIN網絡管理:負責管理LIN總線上的節點,包括節點的配置、識別、診斷和錯誤處理等。
LIN應用層:根據具體的應用需求,實現了與LIN總線通信相關的應用功能,如車門控制、窗戶控制、燈光控制等。

通過使用汽車LIN協議棧,開發人員可以方便地實現LIN總線通信功能,并根據具體的應用需求進行定制和擴展。
-
mcu
+關注
關注
146文章
16667瀏覽量
347774 -
CAN
+關注
關注
57文章
2663瀏覽量
462441 -
LIN
+關注
關注
4文章
212瀏覽量
40128 -
協議棧
+關注
關注
2文章
137瀏覽量
33572 -
汽車
+關注
關注
12文章
3269瀏覽量
36831
發布評論請先 登錄
相關推薦
介紹RL-TCPnet網絡協議棧
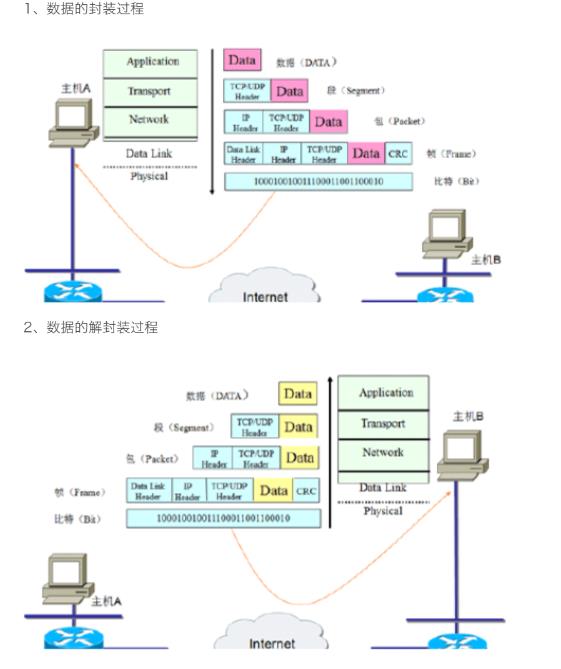
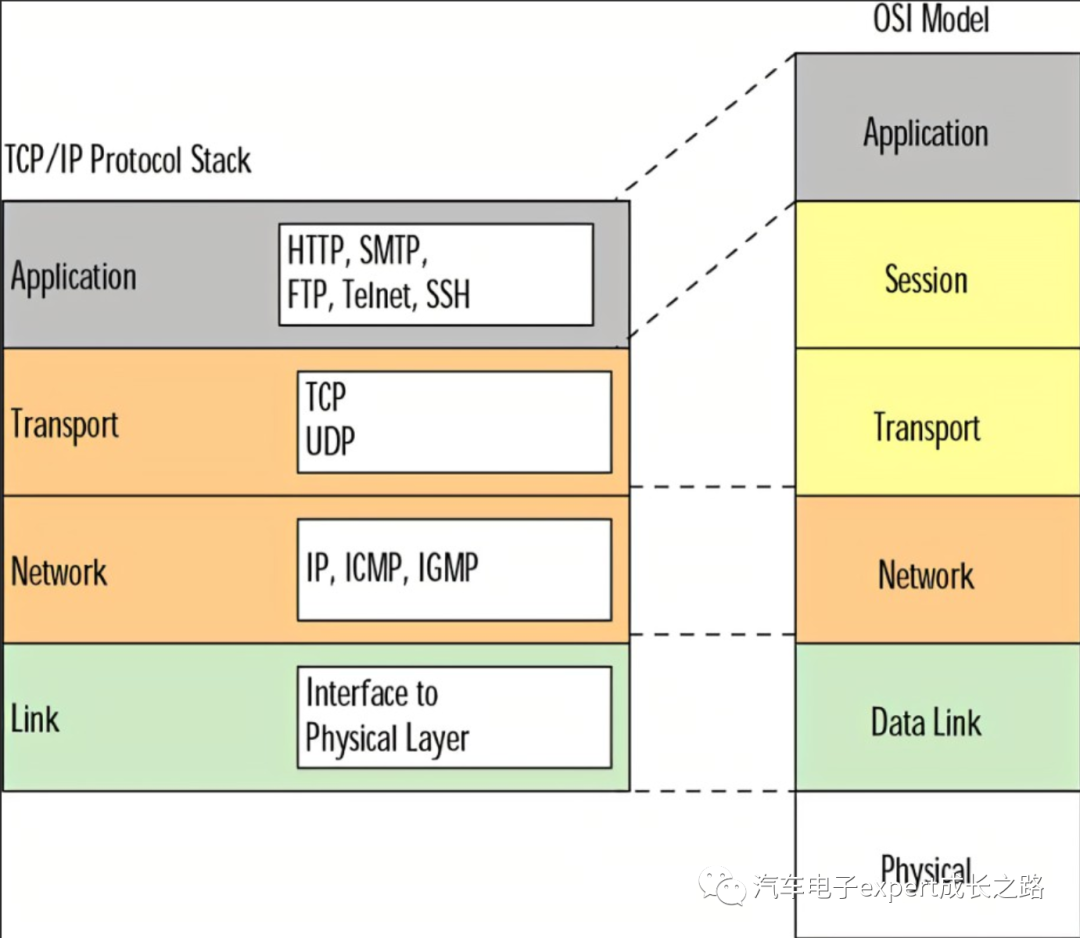
tcpip協議棧是什么?tcpip協議棧有哪些協議?tcpip協議棧中報文封裝和解封裝過程
LIN基礎知識和8位PIC單片機上實現的MCC LIN協議棧庫

汽車UDS協議棧與XCP協議棧





 工商網監
工商網監
評論