 全面介紹視覺傳感器、毫米波雷達、激光雷達
全面介紹視覺傳感器、毫米波雷達、激光雷達
智能汽車是近年來汽車行業先進技術的發展方向,而傳感器的應用是智能汽車環境探測中的關鍵技術。本文介紹了智能汽車環境感知ADAS 系統中常用的傳感器,著重闡述了視覺傳感器、毫米波雷達和激光雷達的工作原理、技術參數、技術類型和應用場景等;同時總結對比了不同類型傳感器的技術特點,提出了環境感知系統的發展趨勢,為今后的自動駕駛相關研究提供參考。
1 引言
智能汽車(Intelligent Vehicles,IV)通過車載傳感系統具備主動環境感知能力,利用車載信息終端實現與人、車、路等信息的交換,是智能交通系統的重要組成部分[1]。自主式智能汽車的初級階段是具有先進駕駛輔助系統(Advanced Driver Assistance Systems,ADAS)的汽車,具備自主決策能力自動分析車輛行駛的安全及危險狀態,能夠執行車輛制動、驅動、轉向干預,并利用聲音、影像、燈光、觸覺報警等方式提醒駕駛員[2]。
自主式智能汽車ADAS 系統是車輛從被動安全技術向主動安全技術的重要變革,其核心是環境感知系統,主要由感知層、決策層和執行層組成,本文重點介紹ADAS 系統感知層中攝像頭、毫米波雷達、激光雷達等各類傳感器的技術特征及發展趨勢。
2 智能汽車環境感知傳感器
2.1視覺傳感器
視覺傳感器是利用攝像頭獲取到的圖像進行圖像處理,捕捉對象物如面積、重心、尺寸、方位等關鍵特征量,并能夠輸出數據便于決策單元做分析的傳感器,是實現眾多預警、識別類ADAS 功能的基礎,同時也是自動駕駛必備的傳感器之一[3]。
按照車載視覺傳感器原理和布置方式的不同,主要分為:單目攝像頭、多目攝像頭、環視攝像頭、紅外夜視攝像頭等,其技術特點對比表如表1 所示。
表1 各類視覺傳感器技術特點對比
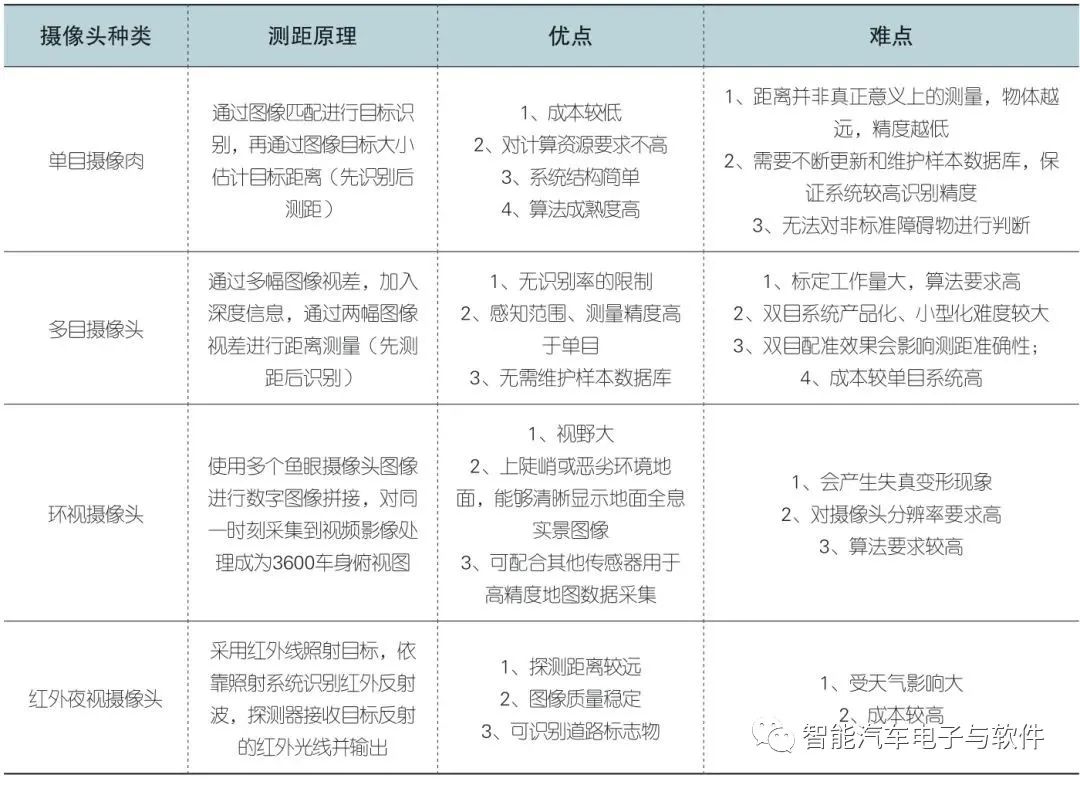
視覺傳感器特點主要有:
1、視覺圖像信息豐富,可識別交通標示、地面標志物、車道線、交通信號燈等;
2、視覺攝像頭可實現道路特征與高精度地圖匹配后的輔助定位,環境適應能力強;
3、與機器學習、深度學習等人工智能相融合,可獲取更高檢測效果。
4、受天氣影響大,算法及算力要求較高。
2.2毫米波雷達
車載毫米波雷達主要由發射模塊、接收模塊、信號處理模塊及天線等組成,其工作原理如圖1 所示[5]。雷達天線向外發射毫米波信號,通過接收目標的反射信號,經信號處理模塊獲取車輛周邊的環境信息,主要包括與探測物體間的相對距離、速度、角度及運動方向等;依據此信息進行目標跟蹤和識別,結合車身信息狀態,經車輛ECU 處理及決策后,以聲音、圖像和振動等形式提醒駕駛員,或及時做出制動、驅動和轉向干預。
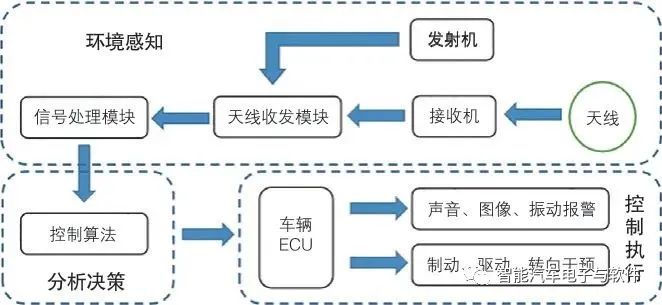
圖1 車載毫米波雷達工作原理
毫米波雷達按照工作原理可分為脈沖式毫米波雷達與調頻式連續毫米波雷達,脈沖式毫米波雷達通過發射、接受電磁脈沖信號間的時間差計算目標位置信息,但由于需要在微秒級別內發射大功率脈沖信號,且需要對收、發設備進行隔離技術處理,導致這類型毫米波雷達在硬件設計上較為復雜,產品成本高;同時在高速情況下回波信號易到周圍環境影響,接收系統靈敏度有限,故在智能車用領域較少采用。調頻式連續毫米波雷達是目前車載毫米波的主流方案,主要利用多普勒效應(Dopler Effect)測量目標狀態信息,通過分析一個或多個發射信號頻率與反射信號頻率的變化,計算出目標與雷達的相對位置信息,可實現對多目標識別,技術相對成熟。
毫米波雷達按照探測距離可分為短程毫米波雷達(SRR)、中程毫米波雷達(MRR)和遠程毫米波雷達(LRR)三類,具體參數對比如表2 所示。目前MRR/LRR 相比LRR 具有體積小、單芯片集成度高、性能好以及研發、物料成本低的優點,MRR/LRR將成為行業未來發展主要方向。
表2 不同探測距離毫米波雷達技術特點對比

毫米波雷達特點主要有:
1、視野覆蓋范圍廣,探測距離遠,最大探測距離可達250m;
2、探測性能好,成像能力強,不受物體顏色與環境溫度影響,可在極端環境下全天候正常工作;
3、靈敏度高、響應速度快、方向性好、低空跟蹤精度較高;
4、體積小、質量輕、技術成熟、工藝相對簡單,性價比高;
5、抗干擾能力強,受地面雜波及噪聲影響小;
6、覆蓋區域呈扇形,存在盲區;無法識別交通標志及信號燈。
2.3激光雷達
激光雷達(Light Detection and Ranging,LiDAR)是一種以利用激光器為發射光源,利用光電探測方式的光學遙感傳感器,通過向目標物體發射探測激光信號,比較接收、發射信號差異,輸出點云,呈現目標物精確的三維結構信息,從而獲取距離、方位和高度等位置信息及速度、姿態等運動狀態的傳感器,從而對目標物體進行探測、跟蹤和識別,能幫助汽車實現周圍環境的精準3D 重建,被稱為最有效的智能汽車環境感知方案之一[6]。
不同類型的激光雷達結構略有差異,但都主要由激光發射系統、激光接收系統、信息處理系統和掃描系統四大部分組成。激光發射系統中的驅動電路周期性的驅動激光器發射激光脈沖,通過激光調制器的光束控制器調整發射激光的方向及線數,再由發射光學系統發射激光;經接收光學系統,光電探測器接收目標物體反射的激光信號,并將信息傳遞至信息處理系統;信息處理系統經過放大處理及數模轉換,由控制單元計算分析獲取目標表面形態、物理屬性等特征,建立物體模型;掃描系統則是能夠改變激光束的空間投射方向,能夠以穩定的轉速旋轉對所在平面進行掃描,并產生實時平面圖信息,實現激光雷達的3D 建模及雷達定位,具體組成原理如圖2 所示。
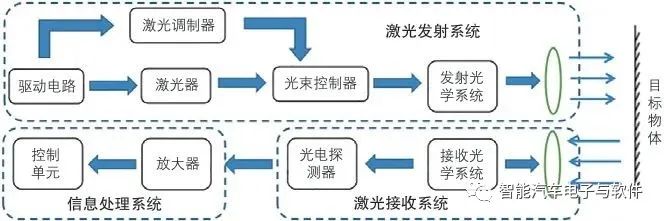
圖2 激光雷達工作原理
按照掃描系統原理差異,激光雷達主要分為機械激光雷達、混合固態激光雷達、固態激光雷達三種類型。機械式激光雷達是帶有控制激光發射角度的旋轉部件進行全面掃描;混合固態激光雷達無需機械旋轉結構,而是采用內部玻璃片旋轉的方式改變光束角度,主要有微機電系統MEMS、轉鏡式、棱鏡式三種類型;固態激光雷達也無需機械旋轉結構,而是依靠電控方式改變激光發射方向,主要有Flash 和光學相控陣OPA 兩種類型。不同掃描系統原理的激光雷達技術特點如表3 所示。
表3 不同掃描系統原理的激光雷達技術特點對比

按照發射光波長的差異,目前主流的三維成像激光雷達發射光主要有905nm 和1550nm 兩種波長。其中905nm 激光接收器使用價格較低的硅材質,以半導體激光器為光源器件,成本較低、尺寸相對較小,是目前最主流的激光雷達類型,但為避免對人眼造成傷害,其發射功率和探測距離會受到限制;1550nm 波長激光則不會對人體視網膜產生傷害,發射功率較高、探測距離遠、穿透能力強、受日光干擾小,但需要以光纖激光器為光源器件,探測器材料成本較高。
激光雷達主要有以下特點:
1)分辨率高。激光雷達距離分辨率可達±5cm 以下;速度分辨率達10m/s 以內,可同時跟蹤多個目標;
2)探測范圍廣。探測距離可達300m 以上、水平視場角可達360°、垂直視場角可達40°;
3)信息量豐富。激光雷達不僅可以探測周邊車輛信息,還能有效識別路面凹凸、拋灑物、大型靜止障礙物等目標物。
4)可全天候工作。無需外接光照條件即可正常工作。
5)隱蔽性好,抗干擾能力強。激光雷達發射口徑小,接收區域窄,干擾源少。
6)多線激光雷達成本較高,易受大雨、濃煙、濃霧等天氣影響,同頻段激光雷達易相互干擾。
3 環境感知傳感器性能對比
智能汽車高級別的自動駕駛需要環境感知系統多種傳感器的優勢互補,不同類型傳感器性能對比如表4 所示[7]。
表4 各類型傳感器技術特點對比

不同類型的環境感知傳感器有各自的優勢和應用局限性,目前發展趨勢是通過多傳感器信息融合以彌補單一傳感器的不足。多傳感器融合可更加準確、全面識別外界環境,顯著提高智能駕駛系統的安全性和可靠性,是高級別無人駕駛的必然選擇。多傳感器融合在硬件層面上要求傳感器數量要足夠,保證功能互補、信息全面、可信度高、識別能力強;軟件層面上要求算法數據運算速度快、并行處理能力強、兼容協調性好、容錯率高,保證決策的時效性和準確度。
4 結語
本文對智能汽車環境感知系統中的視覺傳感器、毫米波雷達、激光雷達等傳感器進行了較為全面的介紹,并對比了各類傳感器的技術特點。相較其他類型傳感器,激光雷達所見即所得,能夠實現三維實時感知,避開對算法和數據的高度依賴,在探測精度、可靠性和抗干擾能力等方面具備特色優勢,而1550nm 波長、FMCW 測距方式的固態激光雷達方案已是目前發展趨勢。目前“毫米波雷達+攝像頭”方案是短期內最有可能的技術組合,但長遠來看,隨著成本的下降,“固態激光雷達+攝像頭”具備更大潛力,或將成為主流。
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752010 -
激光雷達
+關注
關注
967文章
3939瀏覽量
189598 -
毫米波雷達
+關注
關注
106文章
1030瀏覽量
64240
原文標題:全面介紹視覺傳感器、毫米波雷達、激光雷達
文章出處:【微信號:智能汽車電子與軟件,微信公眾號:智能汽車電子與軟件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦


毫米波雷達與超聲波雷達的區別是什么
簡述毫米波雷達的結構、原理和特點
激光雷達與毫米波雷達的優缺點是什么
激光雷達VS毫米波雷達,一文讀懂!

除了“上車”,毫米波雷達還可以有很多選擇

基于毫米波雷達的手勢識別算法
森思泰克全新推出96線激光雷達和192線激光雷達產品






 工商網監
工商網監
評論