 鎖相環是如何得到電網電壓相位和頻率的?
鎖相環是如何得到電網電壓相位和頻率的?
鎖相環是一種能夠自動跟蹤輸入信號相位和頻率的負反饋系統,應用廣泛。在并網逆變器以及PFC系統中電網電壓頻率和相位往往是關鍵的控制信息,這里以單相為例,分析鎖相環是如何得到電網電壓相位和頻率的。
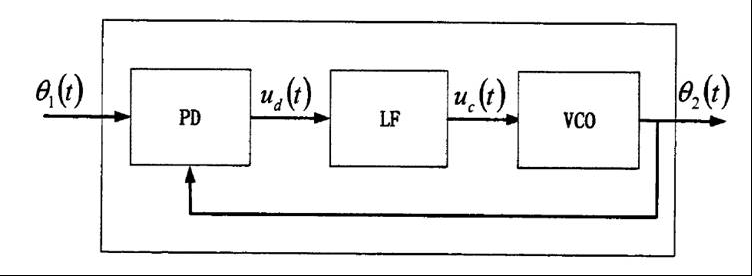
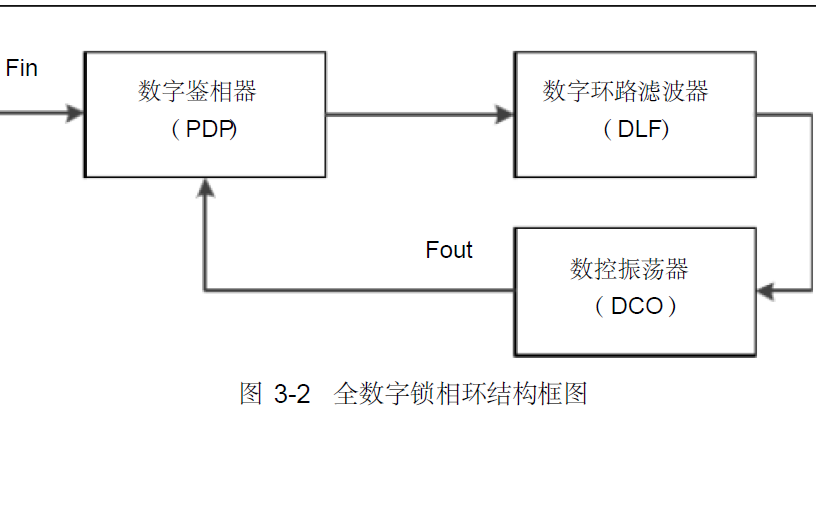
鎖相環的基本結構圖如下圖所示,主要包括三部分:鑒相器PD、環路濾波器LF以及壓控震蕩器VCO;PD負責把輸入信號與系統內部同步信號的相位差轉換為與之相關的電壓信號,然后經過LF濾波或補償后去控制VCO,VCO的輸出改變系統內部同步信號的頻率和相位,進而形成負反饋,最終使內部同步信號跟蹤電網電壓。
單相鎖相環的實現方式有多種,根據鑒相器的不同可以分為兩種,如下圖所示,圖中LPF采用PI補償器,w0為電網角頻率,wout為鎖相環輸出角頻率,θout為鎖相環輸出相位。
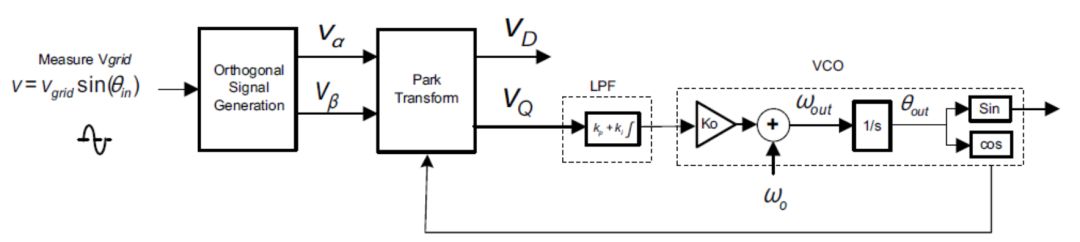
一種是采用坐標變換實現鑒相功能,對一組正交向量(vα與vgrid同相,vβ滯后vgrid 90°)進行Park變換可得:

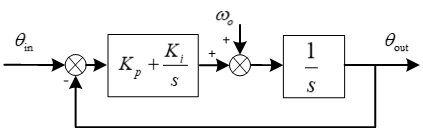
從上式可以看出,vq的值在一定范圍內能反應θin與θout的關系,令vq=0就能夠得到與輸入相位θin相同的相位θout,等效的線性化框圖如下所示。
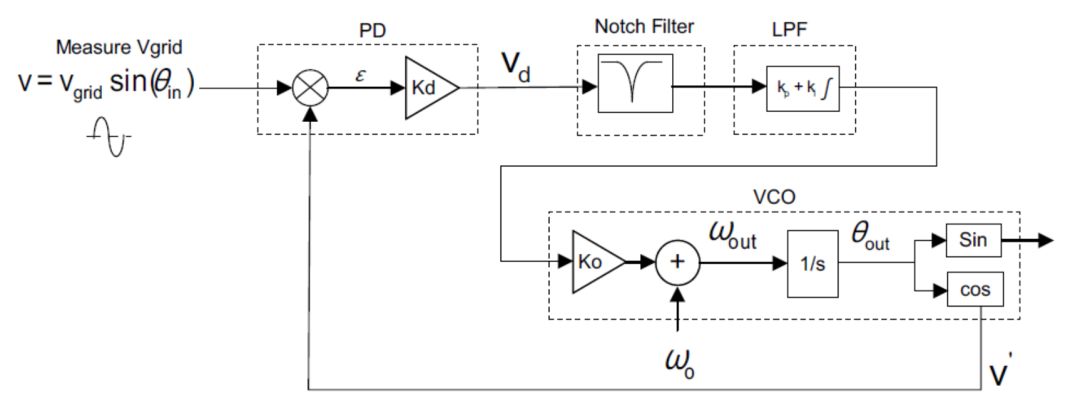
另一種是采用乘法器進行鑒相,其輸出如下式,假設輸出相位θout能夠跟蹤θin,那么vd則含有電網二倍頻分量,這種低頻分量不容易通過LF(一般為PI補償器)濾除,因此一般需要增加額外陷波器濾除。

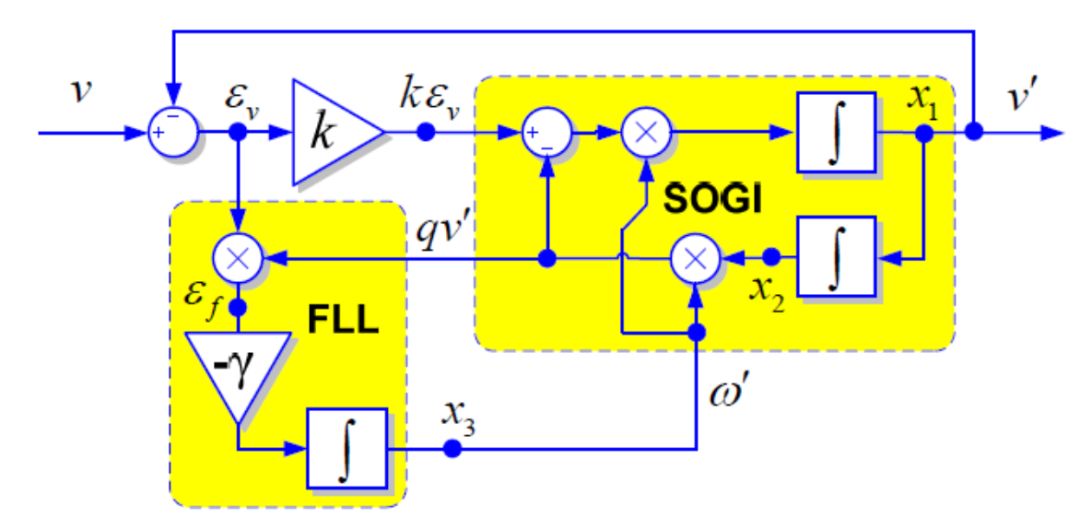
上述第一種方法的關鍵是如何獲得一組正交向量,實現方案有很多種[5],常見的有延遲法、二階廣義積分器(SOGI)等,延遲法很好理解,就是將輸入信號延遲1/4周期使之與輸入正交;SOGI是利用積分器得到兩個正交的信號,如下圖所示,
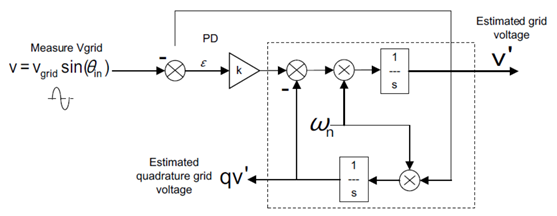
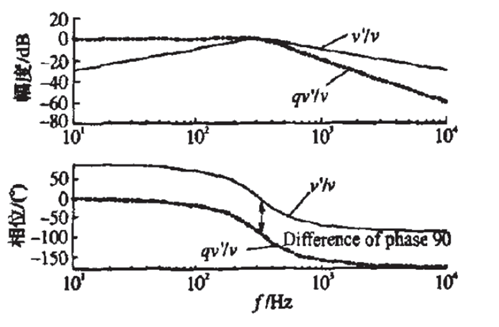
根據上圖可以得到v'和qv'對輸入v的傳遞函數,如下所示,
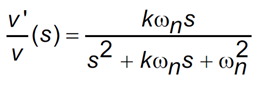
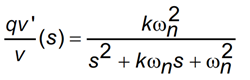
通過其伯德圖可以發現,兩者相位始終相差90°,因此v'和qv'是一組正交向量。
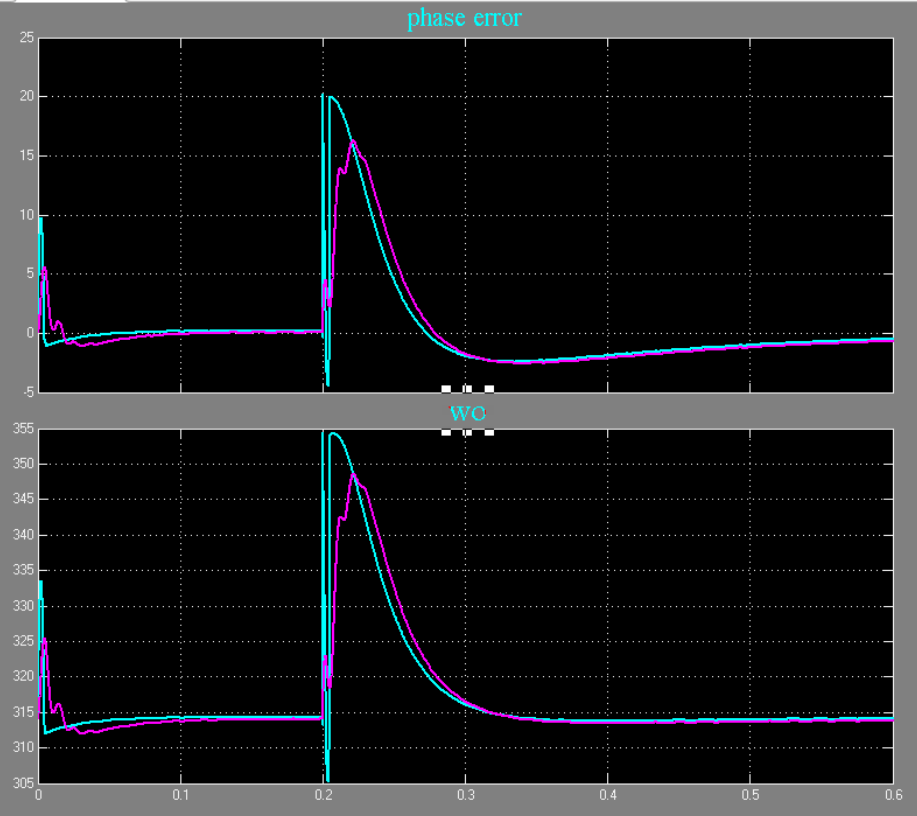
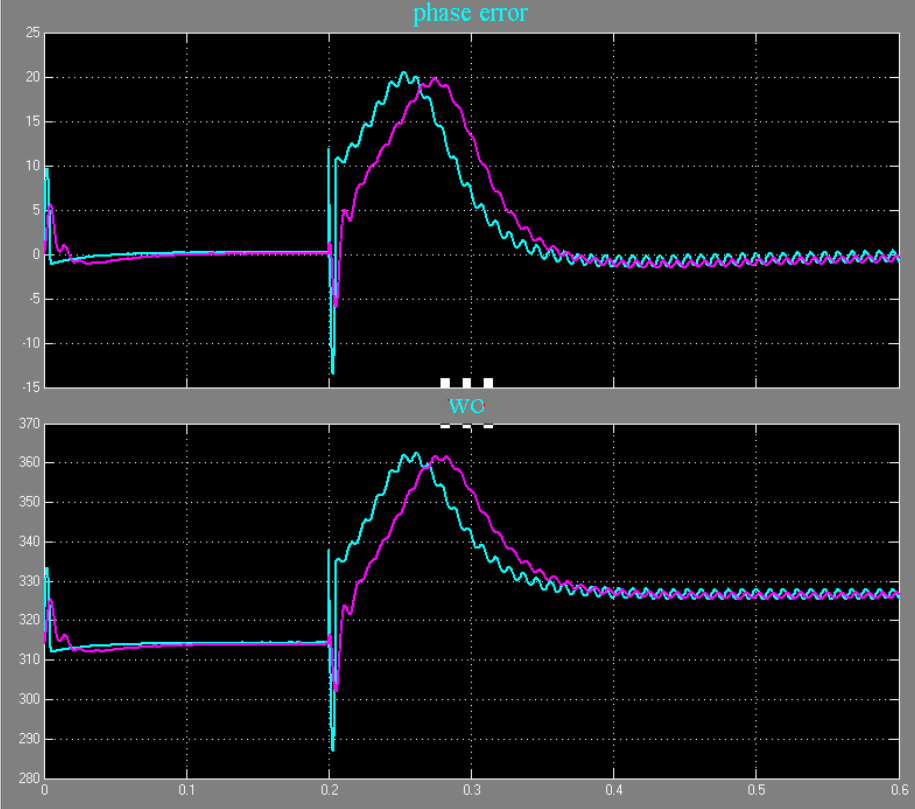
但是兩種獲得正交向量方式也會影響PLL的性能,仿真可以得到兩種方式在電網頻率突變、相位突變以及加入噪聲時PLL跟蹤的相位誤差和頻率。下圖中藍色代表使用延遲法,紫色代表使用SOGI時的情形。
電網相位突變90°時:
電網頻率由50Hz變為52Hz
電網電壓中加入白噪聲時:
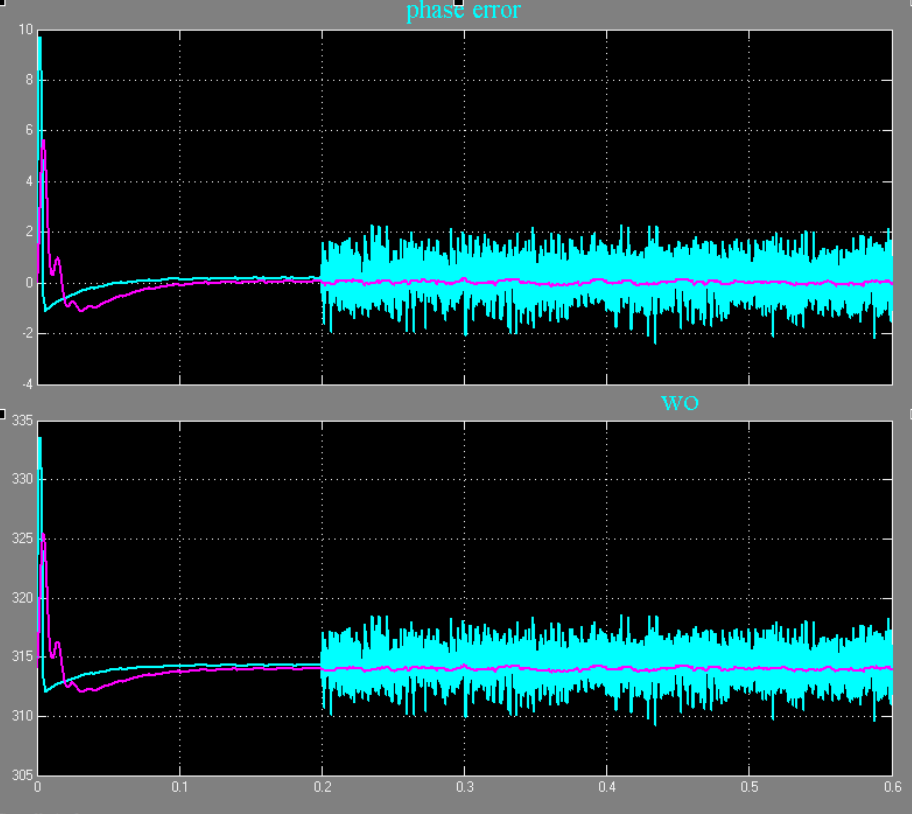
從上面能看出,延遲法和SOGI在電網相位和頻率突變時鎖相環的效果相差不大(SOGI稍好),但在加入噪聲后,延遲法的鎖相效果與SOGI相差較明顯,主要因為延遲法不具有對輸入的濾波能力,SOGI相當于一個震蕩環節,具有一定的濾波能力,抗干擾更好。
同時在頻率突變后,因為正交向量產生環節采用的固定的角頻率或延遲時間,所以鎖相環的相位誤差以及頻率發生震蕩,去除震蕩的方式有多種,可以對信號進行濾波,也可將正交向量產生環節的固定角頻率改為PLL輸出角頻率,也可使用如下的控制框圖使SOGI的角頻率能夠自適應電網頻率,這在論文[4]中有詳細分析。
-
鎖相環
+關注
關注
35文章
583瀏覽量
87697 -
VCO
+關注
關注
12文章
190瀏覽量
69151 -
壓控振蕩器
+關注
關注
10文章
133瀏覽量
29279 -
負反饋
+關注
關注
6文章
216瀏覽量
30023 -
補償器
+關注
關注
0文章
86瀏覽量
14106
發布評論請先 登錄
相關推薦
鎖相環控制頻率的原理
模擬鎖相環,模擬鎖相環原理解析
多速率鎖相環相位同步方法的研究

并網逆變器鎖相環設計

使用FPGA實現數字鎖相環的設計資料說明







 工商網監
工商網監
評論