 Arduino篇—電機的控制
Arduino篇—電機的控制
相關知識
電機(俗稱“馬達”)是指依據電磁感應定律實現電能轉換或傳遞的一種電磁裝置。又分為發電機和電動機,這里我們主要涉及的是電動機的概念。

電動機主要包括一個用以產生磁場的電磁鐵繞組或分布的定子繞組和一個旋轉電樞或轉子和其它附件組成。在定子繞組旋轉磁場的作用下,其在電樞鼠籠式鋁框中有電流通過并受磁場的作用而使其轉動。
直流電機:是將直流電能轉換成機械能(直流電動機)或將機械能轉換成直流電能(直流發電機)的旋轉電機。它是能實現直流電能和機械能互相轉換的電機。
具有啟動電流小,噪音低的特點,電壓范圍在1.5V~6V。
電路搭建
所需材料
arduino UNO * 1
直流電機 * 1
可調電位器 * 1
杜邦線若干
接線方式
方式一、 將直流電機的正極和負極直接接到UNO板子的5V和GND,會發現電機開始轉動,當將接線互換時,電機的轉動方向同樣也會發生改變。
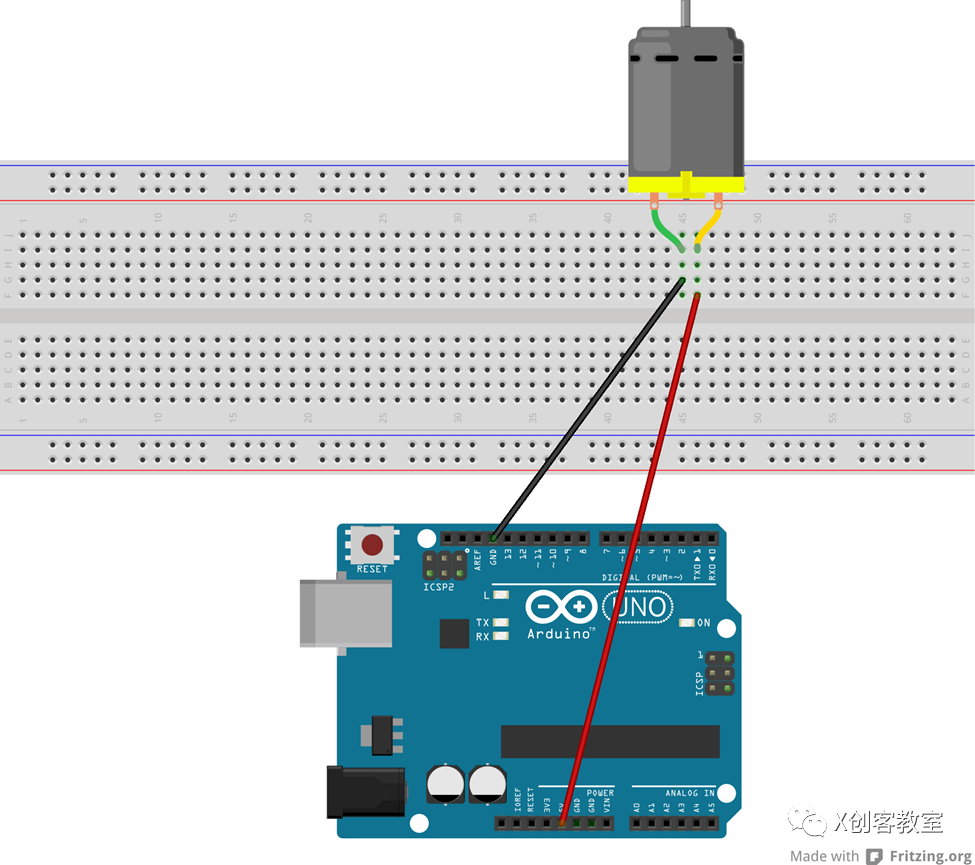
方式二、 將電機正極接入UNO的PWM控制引腳,可以通過編程實現控制電機的轉速。

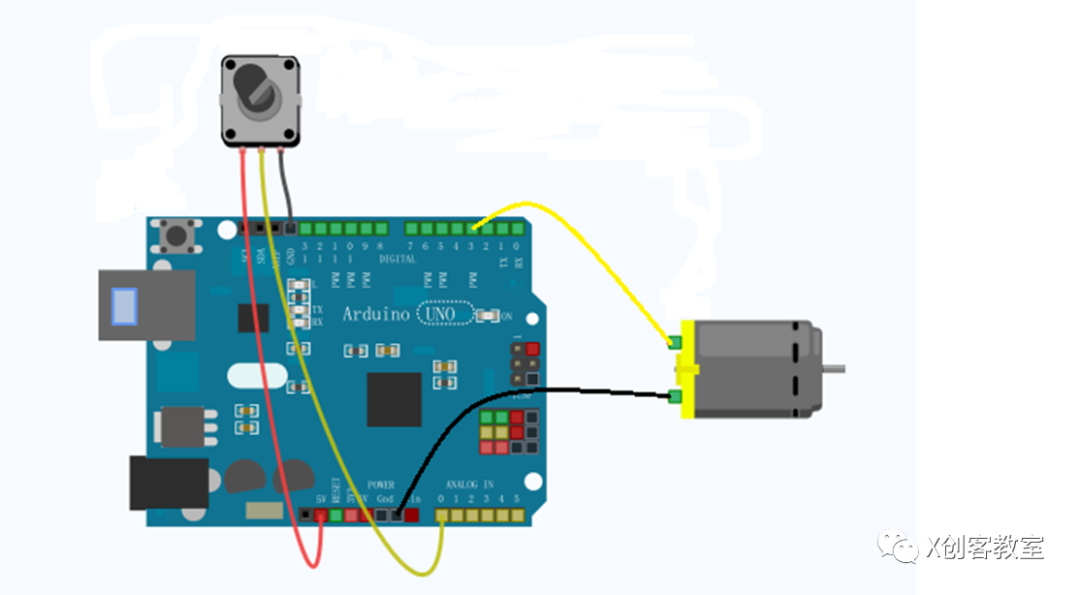
方式三、 編程實現通過電位器來控制馬達的轉速的接線方式。
程序編寫
練習一、程序控制電機轉動
參考方式二的接線,嘗試通過編程的形式來控制電機運動,讓電機的轉速由快到慢,再由慢到快工作。
圖形化方式:
使用for循環,變量i每0.5秒先進行自增,然后進行自減。將變量i賦值給模擬輸出3號引腳,控制電機的轉速。

代碼方式:
/* 項目名稱:馬達轉速自動控制
* 項目時間:2022.02.22
* 項目作者:MRX
*/
int motor_Pin = 3;
void setup() {
pinMode(motor_Pin,OUTPUT);
}
void loop() {
for(int i = 50; i <= 255; i++){
analogWrite(motor_Pin,i);
delay(500);
}
delay(1000);
for(int i = 255; i >= 50; i--){
analogWrite(motor_Pin,i);
delay(500);
}
delay(1000);
}
練習二:電位器控制電機轉速
參考接線方式三,編程實現通過旋轉電位器來控制電機的轉速。
圖形化方式:
注意模擬輸入的區間范圍為01023,模擬輸出的范圍為0255。

代碼方式:
/* 項目名稱:電位器控制轉速
* 項目時間:2022.02.22
* 項目作者:MRX
*/
int motor_Pin = 3;
int AR = 0;
void setup() {
pinMode(motor_Pin,OUTPUT);
pinMode(A0,INPUT);
}
void loop() {
AR = (map(analogRead(A0), 0, 1023, 50, 255));
analogWrite(motor_Pin,AR);
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
電位器
+關注
關注
14文章
1005瀏覽量
66725 -
直流電機
+關注
關注
36文章
1708瀏覽量
70080 -
電動機
+關注
關注
74文章
4090瀏覽量
96013 -
電磁感應
+關注
關注
17文章
809瀏覽量
57979 -
電磁場
+關注
關注
0文章
790瀏覽量
47232
發布評論請先 登錄
相關推薦
如何使用Arduino控制無刷電機
所以基本上在本教程中,我們將使用 Arduino 控制無刷電機。這里 A2212/13T 無傳感器 BLDC 外轉子電機與 20A 電子速度控制

如何使用Arduino的藍牙控制伺服電機
使用伺服電機在機器人技術中很常見,以實現精確控制。在這里,在本教程中,我們將向您展示如何通過藍牙連接將伺服電機與Arduino UNO和Android設備無線使用。我們已經使用
發表于 11-16 16:19
?3456次閱讀

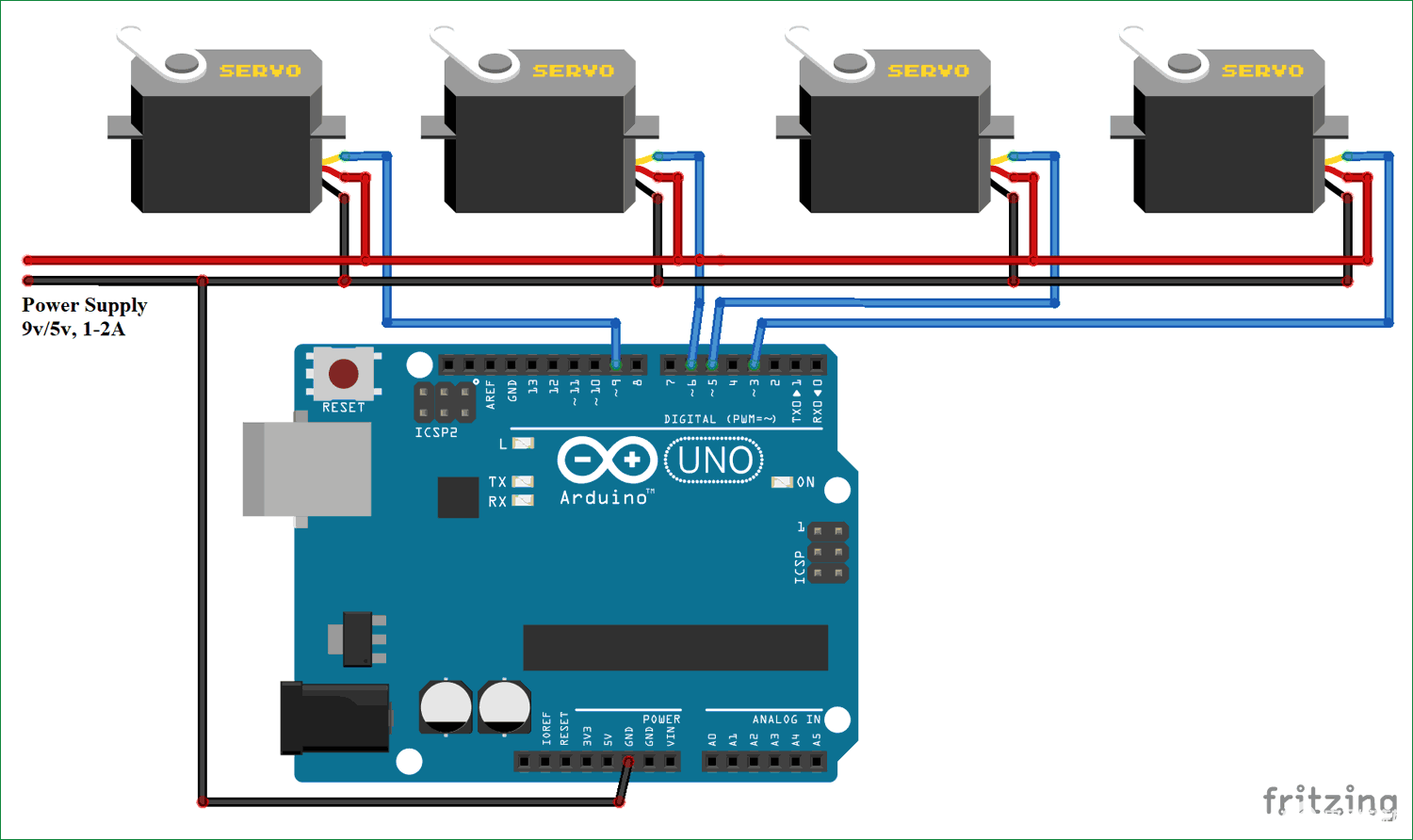
如何使用Arduino控制多個伺服電機
在這里,我們將向您展示如何使用Arduino控制多個伺服電機。將多個伺服電機與Arduino連接似乎很容易,但是如果我們將所有伺服連接到
Arduino智能小車測試篇
為后續的研究先做資料的鋪墊,如果錯誤,歡迎指正Arduino智能小車——測試篇Arduino 智能小車-電機控制delay 延時處理:del
發表于 09-16 07:11
怎樣使用Arduino控制無刷電機
部分)。將ESC的信號線(大部分為白色或黃色)連接到任何Arduino的PWM引腳,我將其連接到D8引腳并在Arduino Sketch中將其指定為引腳8。您可以使用多個引腳來控制許多電機
Arduino無刷電機控制教程
在本教程中,我們將學習如何使用 Arduino 和 ESC 控制無刷電機。如果您想了解更多 BLDC 電機的工作原理,您可以查看另一篇文章或
發表于 05-05 11:34
?2次下載

arduino控制步進電機代碼
Arduino是一種開放源代碼的電路板平臺,它可以用于控制各種不同的電子設備,包括步進電機。步進電機是一種電動機,可以通過下達特定的指令來控制
如何使用Arduino UNO板和電位器控制伺服電機
在本Arduino伺服電機教程中,您將學習如何使用Arduino UNO板和電位器控制伺服電機。






 工商網監
工商網監
評論