") ArmSom--攝像頭開(kāi)發(fā)指南(一)
ArmSom--攝像頭開(kāi)發(fā)指南(一)
一. 簡(jiǎn)介
RK3588從入門(mén)到精通
開(kāi)發(fā)板:ArmSoM-W3
Kernel:5.10.160
OS:Debian11
本?主要介紹在Rockchip平臺(tái)下Camera相關(guān)代碼配置,MIPI-CSI調(diào)試的通路解析
名詞解釋:
CSI ( Camera Serial Interface ):主機(jī)處理器與攝像頭模塊之間的高速串行接口
DSI ( Display Serial Interface ):主機(jī)處理器與顯示模塊之間的高速串行接口
ISP ( Image Signal Processor ): 即圖像信號(hào)處理模塊, 主要作用是對(duì)前端圖像傳感器輸出的信號(hào)做后期處理,依賴于 ISP 才能在不同的光學(xué)條件下都能較好的還原現(xiàn)場(chǎng)細(xì)節(jié)。
VICAP( Video capture ):視頻捕獲單元
MIPI-DPHY :Rockchip芯片中符合MIPI-DPHY協(xié)議的控制器。
二. MIPI-CSI基礎(chǔ)概念
MIPI:移動(dòng)產(chǎn)業(yè)處理器接口(Mobile Industry Processorinterface) 是MIPI聯(lián)盟發(fā)起的為移動(dòng)應(yīng)用處理器制定的開(kāi)放標(biāo)準(zhǔn)。
CSI: MIPI-CSI-2協(xié)議是MIPI聯(lián)盟協(xié)議的子協(xié)議,專門(mén)針對(duì)攝像頭芯片的接口而設(shè)計(jì)。
由于其高速,低功耗的特點(diǎn),MIPI-CSI2協(xié)議極大的支持了高清攝像頭領(lǐng)域的發(fā)展,CSI-2協(xié)議遵循的物理標(biāo)準(zhǔn)有兩個(gè),分別為C-PHY和D-PHY。
D-PHY與C-PHY區(qū)別: 從實(shí)用角度來(lái)看,主要是數(shù)據(jù)線和時(shí)鐘線的區(qū)別,還有傳輸速率,C-PHY通過(guò)某些技術(shù)改良,使數(shù)據(jù)傳輸速度更快。
瑞芯微3588用的DPHY-v1.2 &&(D/C-PHY) DPHY-v2.0。
三. MIPI-CSI硬件配置
RK3588 camera 資源硬件擁有2路DCPHY,2路DPHY,一路DVP,6路CSI HOST,一個(gè)vicap控制器,2個(gè)isp控制器。 其中2路DPHY可以分解成4x2lane的模式工作。
硬件通路框圖如下:
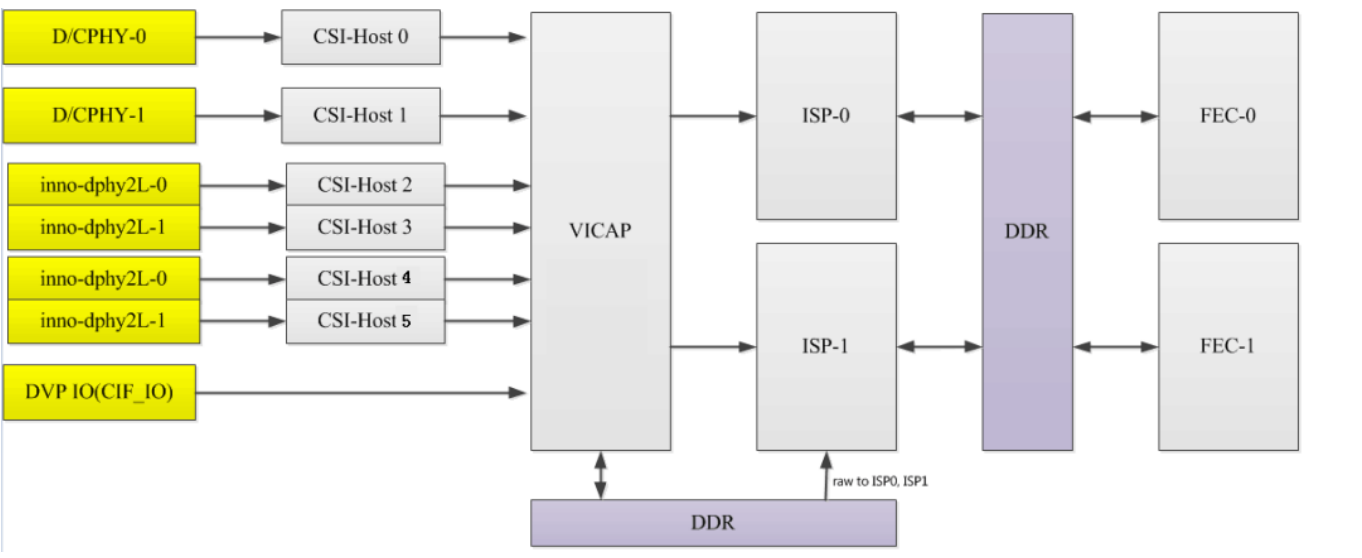 armsom-camera-channel
armsom-camera-channelMIPI-CSI資源介紹 :
| Type | Max bandwidth | NUM | Mode |
|---|---|---|---|
| DPHY-v1.2 | 2.5Gbps x 4 lanes | 2 | 4lane or 2lane+2lane |
| (D/C-PHY) DPHY-v2.0 | DPHY-v2.0: 2.5Gbps x 2lanes | 2 | DPHY-v2.0: 2lane |
| CSI-Host | For MIPI D-PHY v1.2/D-PHY v2.0/C-PHY v1.1 | 6 |
2lane最大帶寬是5G,分辨率可以達(dá)到8M30幀,4lane最大帶寬達(dá)到10G。
三. MIPI CSI用法
3.1 DPHY
rk3588支持兩個(gè)dcphy,節(jié)點(diǎn)名稱分別為csi2_dcphy0/csi2_dcphy1。每個(gè)dcphy硬件支持RX/TX 同時(shí)使用,對(duì)于camera輸入使用的是RX。支持DPHY/CPHY協(xié)議復(fù)用;需要注意的是同一個(gè)dcphy的TX/RX 只能同時(shí)使用DPHY或同時(shí)使用CPHY
rk3588支持2個(gè)dphy硬件,這里我們稱之為dphy0_hw/dphy1_hw,兩個(gè)dphy硬件都可以工作在full mode 和split mode兩種模式下
? Full Mode: ? 僅使用csi2_dphy0,csi2_dphy0與csi2_dphy1/csi2_dphy2互斥,不可同時(shí)使用;
? data lane最大4 lanes;
? 最大速率2.5Gbps/lane;
? Split Mode: ? 僅使用csi2_dphy1和csi2_dphy2, 與csi2_dphy0互斥,不可同時(shí)使用;
? csi2_dphy1和csi2_dphy2可同時(shí)使用;
? csi2_dphy1和csi2_dphy2各自的data lane最大是2 lanes;
? csi2_dphy1對(duì)應(yīng)物理dphy的lane0/lane1;
? csi2_dphy2對(duì)應(yīng)物理dphy的lane2/lane3;
? 最大速率2.5Gbps/lane;
3.2 多sensor支持
硬件支持最多采集7路sensor:6mipi + 1dvp,多sensor軟件通路如下:
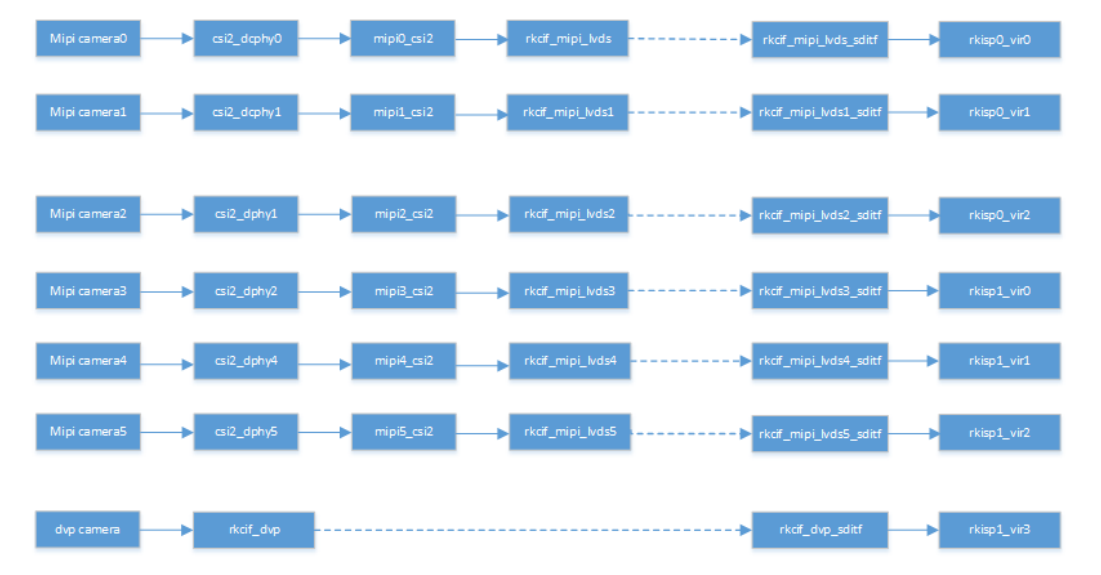 armsom-camera-connect
armsom-camera-connect四. camera相關(guān)配置
4.1 Camera 軟件驅(qū)動(dòng)目錄
Camera相關(guān)驅(qū)動(dòng)文件如下:
|-- arch/arm/boot/dts DTS配置文件
|-- drivers/phy/rockchip
|-- phy-rockchip-mipi-rx.c mipi dphy驅(qū)動(dòng)
|-- phy-rockchip-csi2-dphy-common.h
|-- phy-rockchip-csi2-dphy-hw.c
|-- phy-rockchip-csi2-dphy.c
|-- drivers/media
|-- platform/rockchip/cif RKCIF驅(qū)動(dòng)
|-- platform/rockchip/isp RKISP驅(qū)動(dòng)
|-- dev 包含 probe、異步注冊(cè)、clock、pipeline、 iommu及media/v4l2 framework
|-- capture 包含 mp/sp/rawwr的配置及 vb2,幀中斷處理
|-- dmarx 包含 rawrd的配置及 vb2,幀中斷處理
|-- isp_params 3A相關(guān)參數(shù)設(shè)置
|-- isp_stats 3A相關(guān)統(tǒng)計(jì)
|-- isp_mipi_luma mipi數(shù)據(jù)亮度統(tǒng)計(jì)
|-- regs 寄存器相關(guān)的讀寫(xiě)操作
|-- rkisp isp subdev和entity注冊(cè)
|-- csi csi subdev和mipi配置
|-- bridge bridge subdev,isp和ispp交互橋梁
|-- platform/rockchip/ispp rkispp驅(qū)動(dòng)
|-- dev 包含 probe、異步注冊(cè)、clock、pipeline、 iommu及media/v4l2 framework
|-- stream 包含 4路video輸出的配置及 vb2,幀中斷處理
|-- rkispp ispp subdev和entity注冊(cè)
|-- params TNR/NR/SHP/FEC/ORB參數(shù)設(shè)置
|-- stats ORB統(tǒng)計(jì)信息
|-- i2c
|-- imx415.c CIS(cmos image sensor)驅(qū)動(dòng)
4.2 Sensor驅(qū)動(dòng)開(kāi)發(fā)移植
Sensor 驅(qū)動(dòng)位于 drivers/media/i2c 目錄下,Sensor 驅(qū)動(dòng)與 RKCIF 或者 RKISP1 驅(qū)動(dòng)最大程度上獨(dú)立,二者異步注冊(cè),在dts中由 remote-endpoint 聲明 連接關(guān)系。
Sensor 驅(qū)動(dòng)的開(kāi)發(fā)移植概括為 5 個(gè)部分
1.按照 datasheet 編寫(xiě)上電時(shí)序,主要包括 vdd、reset、powerdown、clk 等
2.配置 sensor 的寄存器以輸出所需的分辨率、格式
3.編寫(xiě) struct v4l2_subdev_ops 所需要的回調(diào)函數(shù),一般包括 set_fmt、get_fmt、s_stream、s_power
4.增加 v4l2 controller 用來(lái)設(shè)置如fps、exposure、gain、test pattern
5.編寫(xiě) probe()函數(shù),并添加 Media Control 及 Sub Device 初始化代碼
Documentation/devicetree/bindings/media/i2c/下面有對(duì)驅(qū)動(dòng)的Documentation可供參考,板級(jí) dts 可以根據(jù)該文檔快速配置。
在板級(jí) dts 中,引用 Sensor 驅(qū)動(dòng),一般需要:
1.配置正確的 clk及io mux
2.根據(jù)原理圖設(shè)置上電時(shí)序所需要的 regulator 及 gpio
3.增加 port 子節(jié)點(diǎn),與 cif 或者 isp 建立連接
4.2.1 上電時(shí)序
不同 Sensor 對(duì)上電時(shí)序要求不同,可能很大部分的 Sensor 對(duì)時(shí)序要求不嚴(yán)格,只要 mclk、vdd、reset 和 powerdown 狀態(tài)是對(duì)的、就能正確進(jìn)行 I2C 通訊并輸出圖片,而不用關(guān)心上電的先后順序及延時(shí), Sensor 廠家提供的 DataSheet 中,一般會(huì)有上電時(shí)序圖,只需要按順序配置即可。
__imx415_power_on() //控制上電時(shí)序部分
__imx415_power_off() //控制下電時(shí)序部分
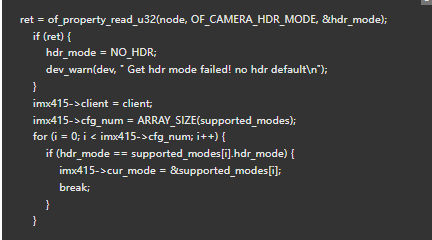
在probe()階段會(huì)去嘗試讀取 chip id,如 imx415的 imx415_check_sensor_id,
ret = __imx415_power_on(imx415); if (ret) goto err_free_handler; ? ret = imx415_check_sensor_id(imx415, client); if (ret) goto err_power_off;
如果能夠正確讀取到chip id,一般就認(rèn)為上電時(shí)序正確,Sensor 能夠正常進(jìn)行 i2c 通信
一般在imx415_check_sensor_id()中出現(xiàn)問(wèn)題、按照以下方式排查
1.先將__imx415_power_off()注釋掉
2.檢查i2c從地址、i2c讀函數(shù)
3.可以抓下i2c的波形
4.2.2 Sensor 初始化寄存器列表
在imx415的驅(qū)動(dòng)中,定義了struct imx415_mode supported_modes[],用來(lái)表示Sensor 支持的不同初始化 mode,即Sensor可以輸出不同分辨率的圖像、不同的fps等。Mode 可以包括如分辨率,Mbus Code,fps,寄存器初始化列表等。
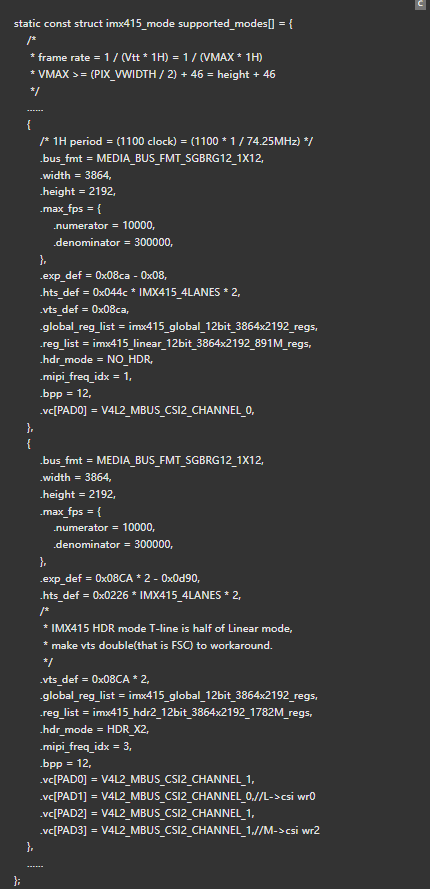
這里支持很多種imx415模組的分辨率配置,默認(rèn)是3864x2192@30fp,查看下面代碼可知會(huì)以一種分辨率來(lái)做為默認(rèn)的配置:
適配新的分辨率需要替換新的初始化列表,例如imx415攝像頭,僅支持30幀,但是需要提升到60幀。
sensor本身支持的最大mipi傳輸速率,每秒傳輸?shù)臄?shù)據(jù)量是width * height * 10bit * fps,這個(gè)也是有上限,不能無(wú)限制提高。 IMX415的DateSheet上寫(xiě)的就是支持3864x2192@30fps,要調(diào)整為60幀,需要廠家提供一組低分辨率的sensor配置,比如1080P@60fps,然后添加到struct imx415_mode supported_modes[]的.reg_list中,reg_list列表最后用了 REG_NULL 表示結(jié)束。
4.2.3 回調(diào)函數(shù)
v4l2_subdev_ops 回調(diào)函數(shù)是 Sensor 驅(qū)動(dòng)中邏輯控制的核心,包含豐富的接口給上層應(yīng)用調(diào)用
static const struct v4l2_subdev_ops imx415_subdev_ops = { .core = &imx415_core_ops, .video = &imx415_video_ops, .pad = &imx415_pad_ops, };
部分成員函數(shù):
open - Userspace通過(guò)在打開(kāi)/dev/v4l-subdev?節(jié)點(diǎn)時(shí),會(huì)調(diào)用到該.open()函數(shù)。
s_power - 包括power on和power off。在這里上電或者下電
enum_mbus_code - 用于枚舉支持的媒體總線(Media Bus)格式代碼。媒體總線是V4L2系統(tǒng)中用于描述圖像格式的標(biāo)準(zhǔn)。這個(gè)函數(shù)可能會(huì)列出IMX415傳感器支持的不同媒體總線格式代碼。
enum_frame_size - 用于枚舉傳感器支持的不同幀尺寸(分辨率)。這個(gè)函數(shù)可能會(huì)返回一組可用的幀尺寸選項(xiàng),供應(yīng)用程序選擇。
enum_frame_interval - 用于枚舉傳感器支持的不同幀間隔(幀速率)。它會(huì)返回可用的幀間隔選項(xiàng),以供應(yīng)用程序選擇。
get_fmt - 用于獲取當(dāng)前傳感器的圖像格式。應(yīng)用程序可以使用它來(lái)查詢當(dāng)前設(shè)置的圖像格式。
set_fmt - 用于設(shè)置傳感器的圖像格式。應(yīng)用程序可以使用它來(lái)配置所需的圖像格式。
get_selection - 用于獲取當(dāng)前傳感器的圖像選擇(ROI - Region of Interest)。這允許應(yīng)用程序了解當(dāng)前的感興趣區(qū)域設(shè)置。
get_mbus_config - 用于獲取媒體總線配置,包括數(shù)據(jù)總線寬度、時(shí)序等信息。
這些函數(shù)在V4L2子設(shè)備的驅(qū)動(dòng)程序中起著關(guān)鍵的作用,允許應(yīng)用程序配置和控制IMX415傳感器,以捕獲圖像和視頻數(shù)據(jù)。
4.3 DTS配置
這里是單路Camera的dts配置說(shuō)明,以imx415攝像頭為例 。
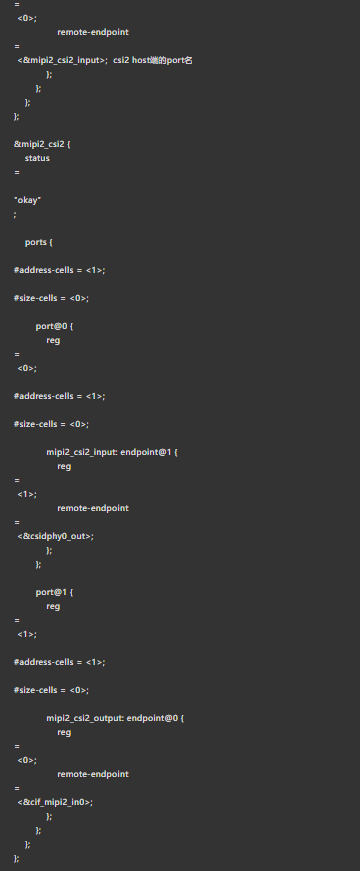
案例場(chǎng)景:這里使用的是csi2_dphy0的單路camera配置:
鏈路配置: imx415 —> csi2_dphy0 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir2
在這個(gè)通路下,會(huì)注冊(cè)medio0和medio1這兩個(gè)節(jié)點(diǎn)。
4.3.1 配置sensor端
我們需要根據(jù)板子原理圖的MIPI CSI接口找到sensor是掛在哪個(gè)I2C總線上,然后在對(duì)應(yīng)的I2C節(jié)點(diǎn)配置camera節(jié)點(diǎn),正確配置camera模組的I2C設(shè)備地址、引腳等屬性。sensor對(duì)應(yīng)驅(qū)動(dòng)路徑在kernel\drivers\media\i2c下面。 下面是imx415配置:
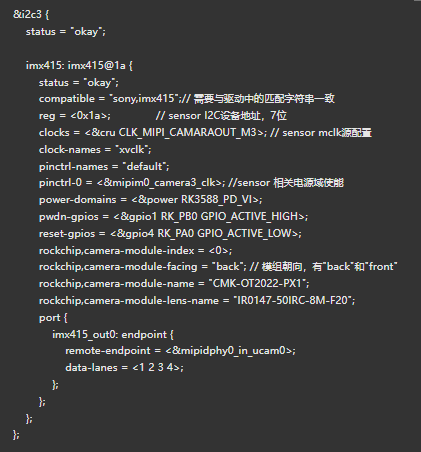
注意:
data-lanes必須指明具體使用的lane數(shù),否則無(wú)法識(shí)別為mipi 類型;
module-index與iq文件中的moduleId相關(guān),<0>對(duì)應(yīng)moduleId配置為m00,<1>對(duì)應(yīng)moduleId配置為m01,m是“module”的縮寫(xiě),01是十進(jìn)制數(shù)字;
module-name與module-lens-name命令與設(shè)備/etc/iqfiles中對(duì)應(yīng)sensor的iq文件名后面相同。這里對(duì)應(yīng)的Sensor iq文件是“imx415_CMK-OT2022-PX1_IR0147-50IRC-8M-F20.json”,注意大小寫(xiě)有區(qū)分
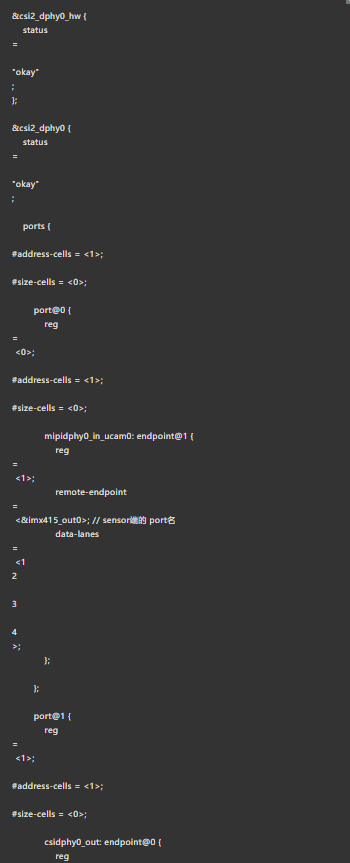
4.3.2 csi2_dphy0配置
csi2_dphy0與csi2_dphy1/csi2_dphy2互斥,不可同時(shí)使用。另外需要使能csi2_dphy0_hw物理節(jié)點(diǎn)
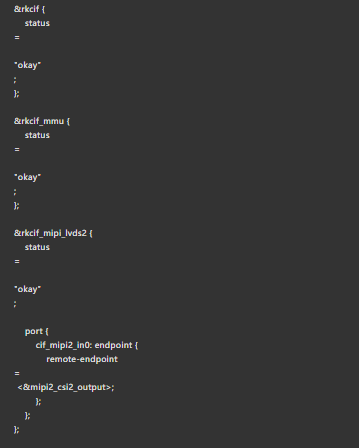
4.3.3 isp相關(guān)配置
&rkcif_mipi_lvds2_sditf { status = "okay"; ? port { mipi_lvds2_sditf: endpoint { remote-endpoint = <&isp0_vir0>; }; }; }; ? &rkisp0 { status = "okay"; }; ? &isp0_mmu { status = "okay"; }; ? &rkisp0_vir0 { status = "okay"; ? port { #address-cells = <1>; #size-cells = <0>; ? isp0_vir0: endpoint@0 { reg = <0>; remote-endpoint = <&mipi_lvds2_sditf>; }; }; };
一個(gè)ISP可以接多個(gè)Sensor,但只能分時(shí)復(fù)用。通過(guò)配置dts,將多個(gè)Sensor鏈接到MIPI DPHY后,可通過(guò)media-ctl切換Sensor。
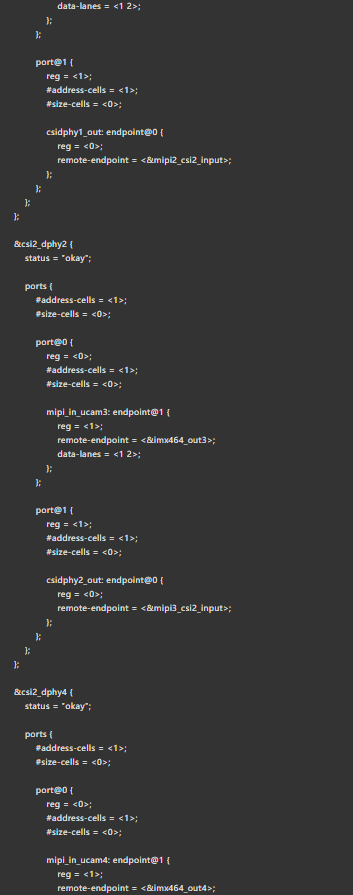
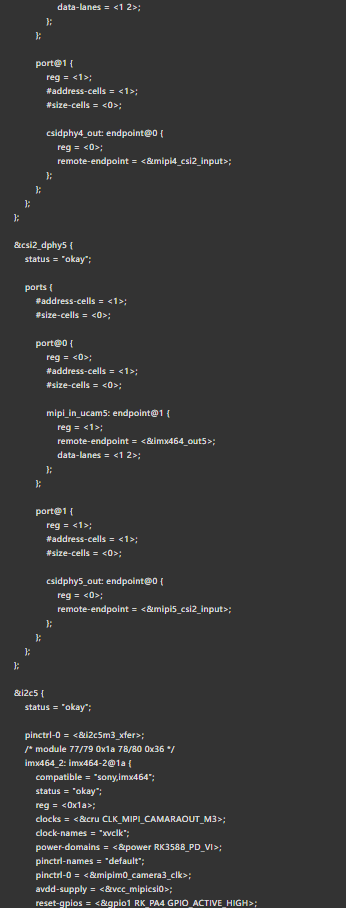
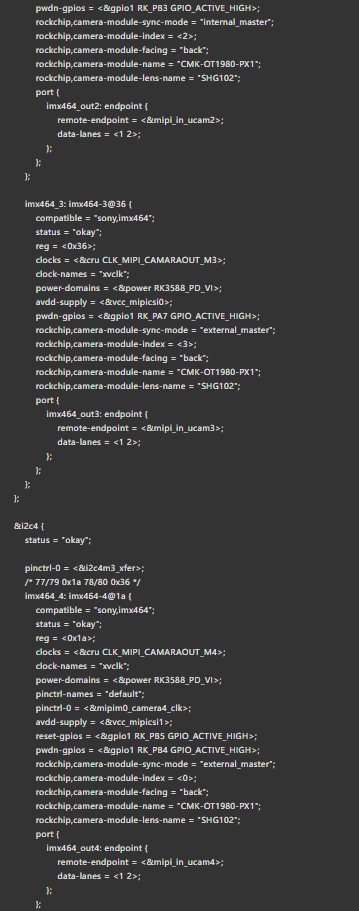
4.4 多攝像頭配置
上述是單目4lan攝像頭的配置,DPHY處于Full Mode下,這里有一份DPHY處于Split Mode下,配置四個(gè)2lan攝像頭的例子: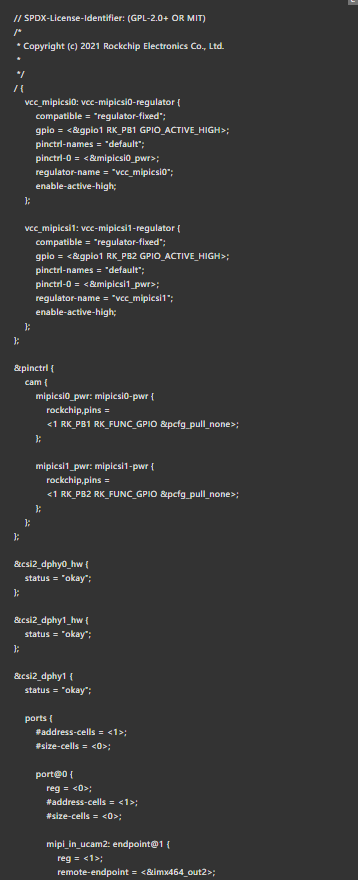
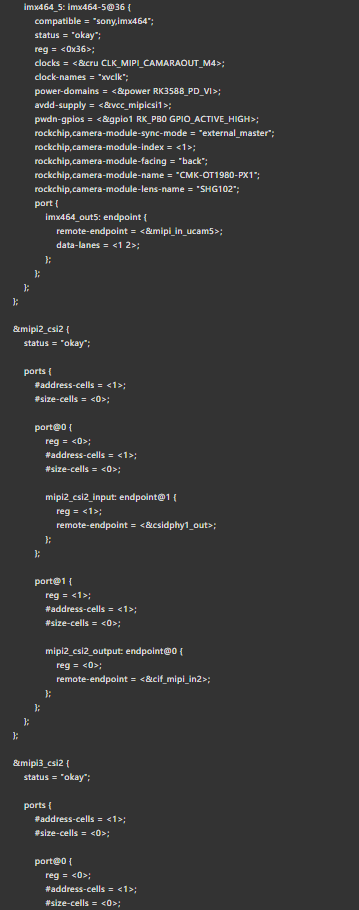
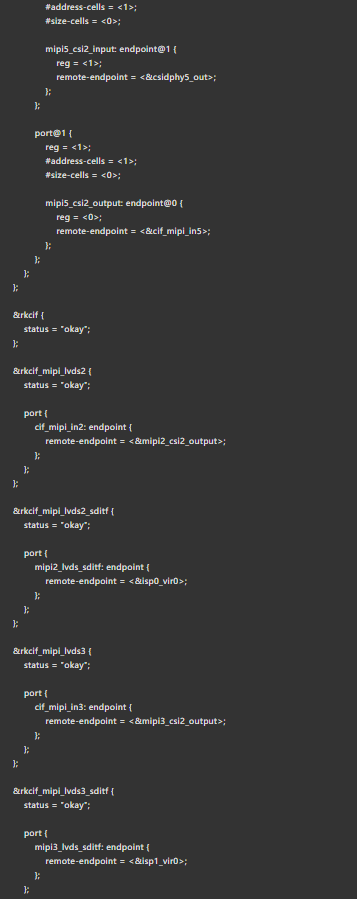
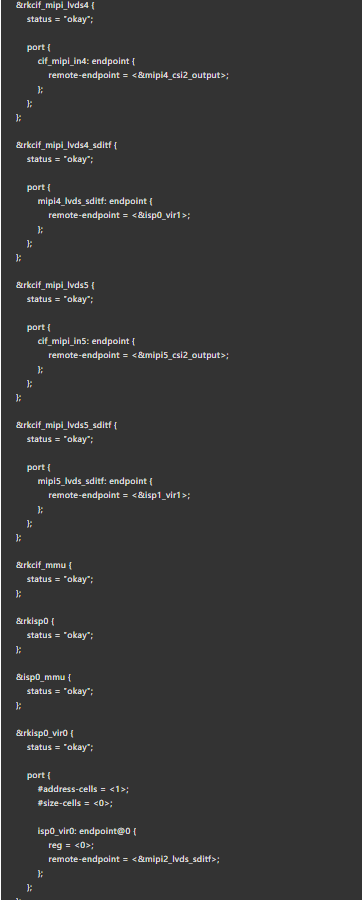
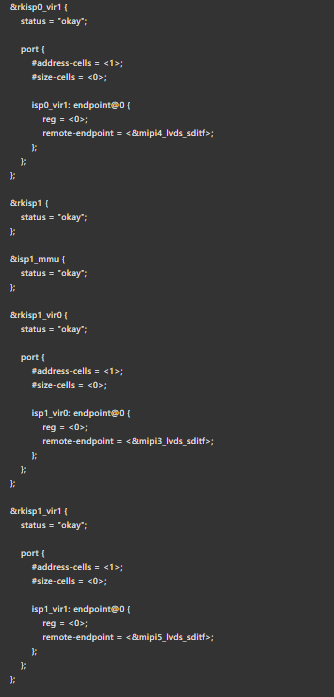
鏈路配置:
imx464 _1—> csi2_dphy1 —> mipi2_csi2 —> rkcif_mipi_lvds2—>rkcif_mipi_lvds2_sditf —>rkisp0_vir0 ? imx464 _2—> csi2_dphy2 —> mipi3_csi2 —> rkcif_mipi_lvds3—>rkcif_mipi_lvds3_sditf —>rkisp0_vir1 ? imx464 _3—> csi2_dphy4 —> mipi4_csi2 —> rkcif_mipi_lvds4—>rkcif_mipi_lvds4_sditf —>rkisp1_vir0 ? imx464 _4—> csi2_dphy5 —> mipi5_csi2 —> rkcif_mipi_lvds5—>rkcif_mipi_lvds5_sditf —>rkisp1_vir0
這里配置四個(gè)同一型號(hào)的攝像頭,如果是有其他類型的攝像頭需要添加,更新、替換相應(yīng)的sensor驅(qū)動(dòng)。
五. 結(jié)語(yǔ)
這里借用ArmSoM-W3開(kāi)發(fā)板上的imx415模組介紹在rockchip平臺(tái)關(guān)于camera的部分配置 ,在開(kāi)發(fā)和配置攝像頭驅(qū)動(dòng)時(shí),每個(gè)具體型號(hào)的攝像頭可能有其獨(dú)特的設(shè)置和要求。如果你對(duì)其他型號(hào)的攝像頭或其他嵌入式系統(tǒng)組件有疑問(wèn),或者需要更多定制的幫助,可以在ArmSom論壇提出問(wèn)題,與其他開(kāi)發(fā)者分享經(jīng)驗(yàn)和獲取支持。
-
攝像頭
+關(guān)注
關(guān)注
59文章
4807瀏覽量
95419 -
開(kāi)發(fā)板
+關(guān)注
關(guān)注
25文章
4943瀏覽量
97188 -
RK3588
+關(guān)注
關(guān)注
6文章
312瀏覽量
4221
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦

用于環(huán)視和CMS攝像頭系統(tǒng)的四通道攝像頭應(yīng)用程序

LVGL開(kāi)發(fā)指南介紹
TPS6503xx-Q1攝像頭PMIC編程指南

爆蘋(píng)果正在探索開(kāi)發(fā)帶攝像頭的AirPods
高清網(wǎng)絡(luò)攝像頭多媒體智能屏






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論