 淺析相控陣的角分辨力和精度
淺析相控陣的角分辨力和精度
角分辨力取決于陣列設計,在beamforming時,也與算法有關,不過,在此只談談基本問題,不說算法的事。
角分辨力的含義是:比如,如果有兩個信號,一個在50度,另一個在52度,(都以某個方向為參考),如果有一陣列,主波束對準50度方向接收信號,但同時52度的信號也進來了,就說明它的角分辨力不夠,接收時沒法“區分開”這兩個相差2度的信號;但如果52度的信號進不來,就說明這個陣的角分辨力至少可以小到2度。——角分辨力越高,越能分辨兩個在方向上靠得很近的信號。
上面說的其它信號“進不來”,是需要有量來說話的,通常有-3dB,-10dB等,比期望信號低這么多,就說信號“進不來”。
發的時候,角分辨力的意思也是一樣的,如果主波束對準50度方向的用戶發信號,結果52度方向的用戶受到了干擾,就說明角分辨力不夠。同上,有沒有受到干擾,也需要用量來衡量。
上面是角分辨力的基本含義,不一定很準確。下面結合我們幾張ppt說一下。
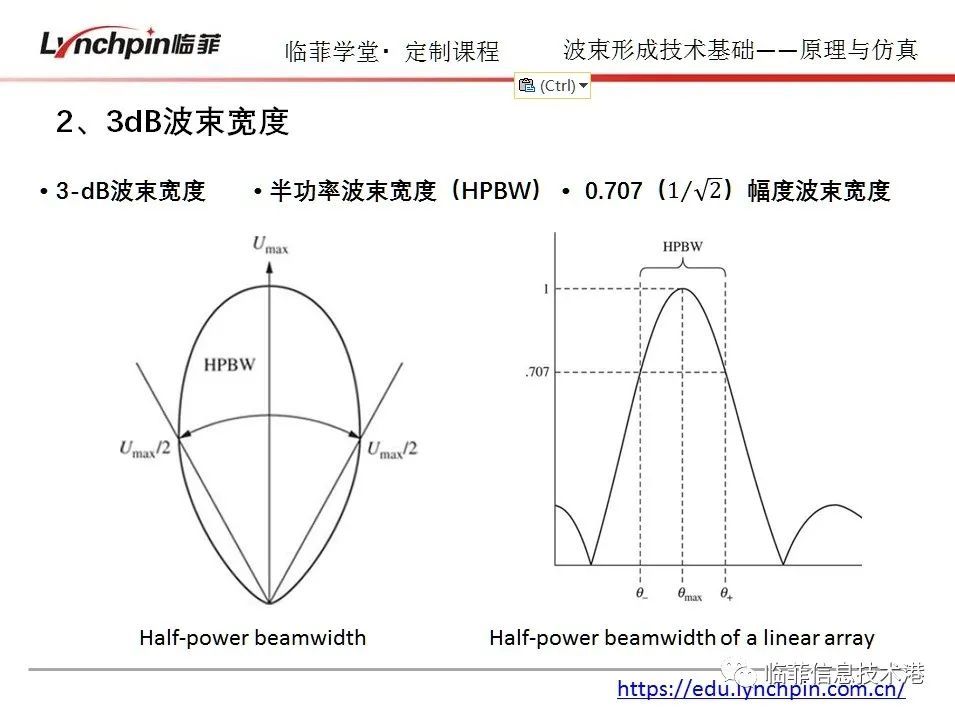
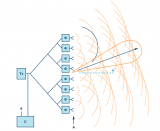
理論上,角分辨力由陣列主波束寬帶決定,用3dB波束寬度,或者10dB波束寬帶。上圖解釋了3dB寬帶,也就是半功率寬度、0.707幅度寬度。
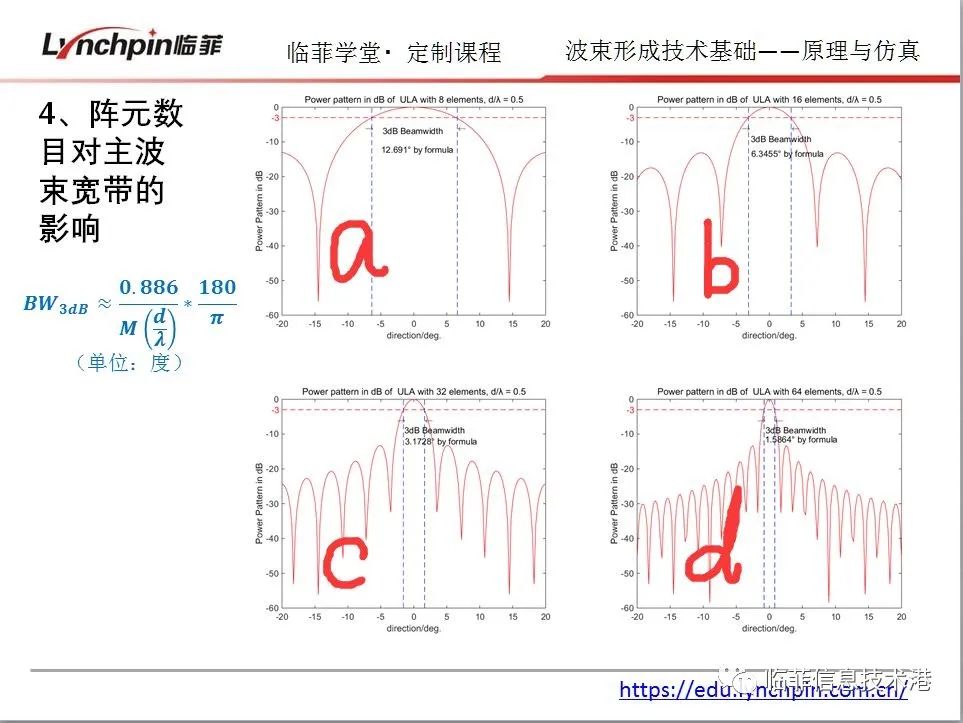
上面的仿真圖,給出了均勻線陣的主波束3dB寬度的近似計算公式,顯然,與陣元數目和陣元間距有關。另外,a圖的波束寬帶約為12.7度,它能分辨兩個方向差大于12.7度的信號,但如果兩個信號的方向差小于12.7度,比如只有5度,這個主波束就把兩個信號都“罩住了”,區別不開他們。b、c、d圖的3dB波束寬度分別約為6.3度、3度、1.6度(特別強調是近似值哈)。上面4個陣的陣元間距都是半個波長,陣元數分別是8、16、32、64.
下面說一下“準確度”。
角分辨力是衡量能不能在角度上分開兩個信號。而準確度是衡量主波束最大增益方向(可以看成是波束的“頂點”)是不是“對準”了期望方向。
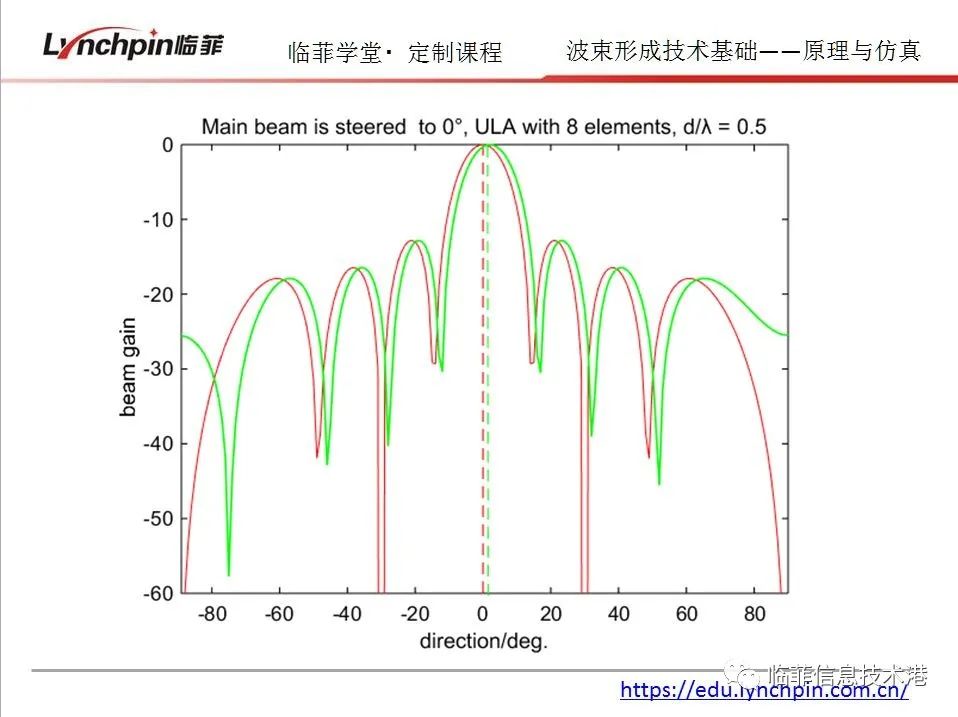
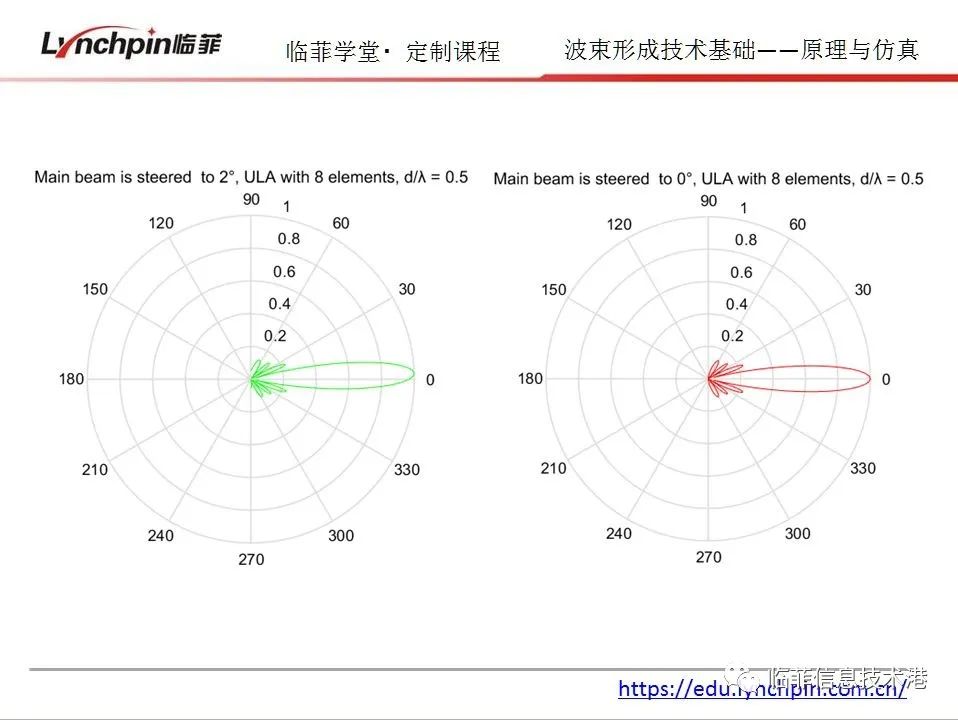
上面的仿真,期望主波束對準0度方向(期望用戶方向),紅色波束的方向是準確的,而綠色的偏差了,沒有對準0度方向。下面是極坐標形式,綠色有偏差,紅色是對準的。
“準確”是衡量有沒有“對準”,偏差了多少。
再說一下“精度”。
“精度”一般是指能精確到什么程度。比如,能到達1度、0.5度、0.05度等。不同應用對精度有不同要求。軟硬件實現時,數字的位數(字的長度)對精度有很大影響。
“準確度”與“精度”的關系
顯然,精度不夠,也將導致偏差,即導致準確度下降。但二者的概念不等同。
-
相控陣
+關注
關注
3文章
91瀏覽量
14149
發布評論請先 登錄
相關推薦
相控陣雷達電源芯片詳解
分析DCDC4644電源芯片在F-35戰機相控陣雷達的應用
測長機在測量長度尺寸方面有哪些優勢?

功率放大器在測試自制接收機設備的水下聲信號波達角測量分辨力中的應用
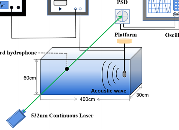
功率放大器在測試自制接收機設備的水下聲信號波達角測量分辨力中的應用
關于直線電機模組分辨率、定位精度和重復定位精度淺談





 工商網監
工商網監
評論