 域架構下的功能安全思考
域架構下的功能安全思考
隨著整車電子電氣架構的發展,功能域控架構向整車集中式區域控制演進。新的區域控制架構下,車身控制模塊(BCM),整車控制單元(VCU),熱管理系統(TMS)和動力底盤等功能等原本獨立的功能域整合到新的區域控制器。同時,區域控制器也集成了二級智能配電功能,真正形成了Power HUB, IO HUB, Data HUB。
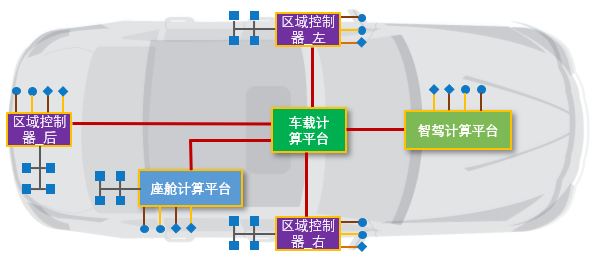
整車區域架構
新EEA架構下,功能安全也隨之有了新的變化。原來多個不同的控制器來實現整車功能,功能安全目標也是以獨立的控制器為主體,結合控制器間的信號交互來共同實現。整車區域架構下,同一個區域控制器中集成車身,動力,底盤控制等功能,有ASIL A/B/C/D四種安全等級安全目標同時出現的情況。這些不同安全目標的實現模塊共享控制器的內部軟硬件資源,如電源模塊,MCU模塊和安全關斷路徑等。
不同功能域對于故障時的響應各有差異。車身類功能安全考慮到系統的魯棒性,控制器故障后一般進入limphome(跛行)模式;而EPB功能安全等級高,當外部獨立看門狗檢測到MCU故障,或MCU內部安全監控模塊檢測到故障,即進入安全狀態。

以近光燈和EPB功能為例淺談區域控制器功能安全設計的一些思考。
從整車安全目標來看,近光燈應避免在行車過程中非預期熄滅,當控制器內部失效后,需要在故障容忍時間間隔(FTTI)內點亮近光燈;EPB最高等級的安全目標應避免在行車過程中非預期的鎖死制動卡鉗,當控制器內部失效后,需要在FTTI內釋放制動卡鉗。
系統層面
一方面為了整車的安全性,兼顧系統的魯棒性,需要收集整車端不同功能和ASIL等級的安全目標,需要考慮不同ASIL等級對于故障的響應,以及對于故障后進入安全狀態的可接受度;另一方面從系統架構上進行安全分析,確認安全目標是否可進行ASIL等級分解。
通過合理的功能分配,將左右近光燈布置在兩個相互獨立的區域控制器中。當某一個控制器內部MCU故障,進入limp home模式點亮近光燈;且當某一個控制器完全失效,另外一個控制器還可以保證其近光燈可以正常點亮,這樣近光燈的安全等級分解為ASIL A(B)。
EPB比較特殊,一般分配在兩個相互獨立的區域控制器中,由于任意一個控制模塊鎖死了制動卡鉗都會違反安全目標,故其最高ASIL D的安全等級不可分解。當控制器出現故障時,通過安全關斷路徑來釋放卡鉗驅動電機,進入安全狀態。
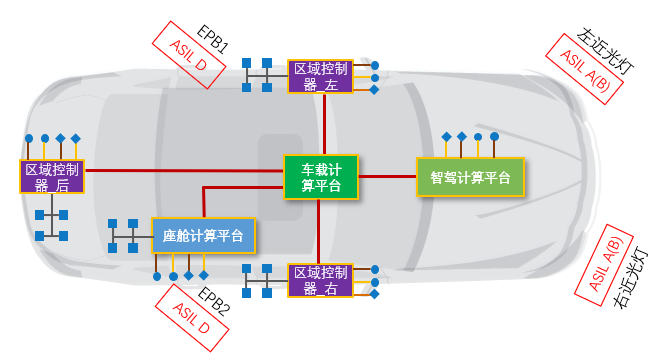
近光燈和EPB功能安全等級

硬件層面
為了保證區域控制器可以實現最高等級的安全目標,內部共用的硬件模塊需要按最高安全等級去開發,如MCU模塊,邏輯電源供電模塊等。控制器內部低安全等級的功能模塊不能影響高安全等級的硬件模塊,需要進行相關失效分析,分析不同安全目標共用的電路模塊,是否存在共因和級聯失效。
當MCU失效后,近光燈和EPB功能不受控。此時,需要安全機制limphome模塊點亮近光燈,安全關斷路徑來關斷EPB制動卡鉗驅動電路,進入安全狀態。且limphome電路不能干擾關斷EPB制動卡鉗的驅動電路。因此,需要設計獨立的limphome電路和安全關斷路徑電路,這兩個硬件電路失效亦不能引起近光燈和EPB功能失效。
軟件層面
需要從軟件架構層面考慮不同ASIL等級的軟件共存問題。近光燈軟件模塊是ASIL A(B),EPB軟件模塊是ASIL D。
為了實現ASIL共存,可將近光燈和EPB軟件放在兩個獨立的鎖步核運行,從時序和執行 (Timing and execution),內存 (Memory)和信息交換 (Exchange of information)三個方面做到免于干擾。
同時,程序的時間和邏輯監控是必要的,用于探測有缺陷的程序,監控程序的表現和合理性。一般通過外部獨立的看門狗進行程序流監控,監控軟件是否正確執行,如程序未在指定的時間內執行,或者時鐘發生故障。
綜上,在區域架構下,功能安全面臨更加復雜的架構和多功能融合的挑戰,區域控制器需要相互協同,共同實現整車的功能安全目標,提高功能安全開發效率,從而降低功能安全開發的成本。
歡迎轉載!
轉載須署名聯合電子并注明來自聯合電子微信!!
分享給朋友或朋友圈請隨意!!

原文標題:域架構下的功能安全思考
文章出處:【微信公眾號:聯合電子】歡迎添加關注!文章轉載請注明出處。
-
汽車電子
+關注
關注
3012文章
7739瀏覽量
164792
原文標題:域架構下的功能安全思考
文章出處:【微信號:聯合電子,微信公眾號:聯合電子】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
經緯恒潤亮相第四屆焉知汽車年會,功能安全賦能域控

汽車智能座艙域功能測試

光庭信息推出了基于S32G+8295+J5新架構的中央域控解決方案
區域架構及其對優化成本和功耗的新機會

第二屆大會回顧第5期 | 分級安全架構構筑智能汽車功能、網絡、隱私三安全

同星智能即將亮相2023中國汽車功能安全與質量管理峰會

基于跨域計算新一代EE架構的SDV車輛特性開發

AUTOSAR架構下的多核通信介紹

基于企業構架(EA)軟件完成汽車車身控制域系統設計方案
基于Tricore芯片的AUTOSAR架構下的多核啟動

如何解決跨域問題
基于域或區域的ECU架構過渡優勢
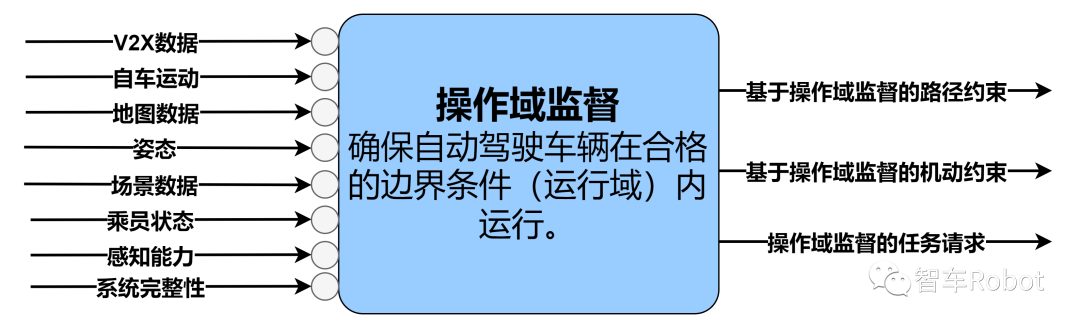
自動駕駛操作域監督是什么





 工商網監
工商網監
評論