") 將RT Thread移植到BL602的方法和關(guān)鍵步驟
將RT Thread移植到BL602的方法和關(guān)鍵步驟
隨著科技的發(fā)展,人們對嵌入式設(shè)備的性能和運行效率要求越來越苛刻,傳統(tǒng)嵌入式設(shè)備存在非常單一的流向、極低的CPU利用率等缺點,實時性對于汽車、航天領(lǐng)域至關(guān)重要,可能會因為處理器沒有及時響應(yīng)任務(wù)而造成極大的損失。針對這一不足,提出將嵌入式操作系統(tǒng)移植到微處理器中以提高運行效率和穩(wěn)定性。RT Thread作為一款實時、搶占式多任務(wù)操作系統(tǒng),在智能家居、航天、安防、可穿戴電子產(chǎn)品方面應(yīng)用廣泛,勢必會成為未來AIoT(人工智能物聯(lián)網(wǎng))平臺主流的操作系統(tǒng)。
為了搶先一步占領(lǐng)市場,將RT Thread移植到各大廠商的芯片上具有極其重要的現(xiàn)實意義,但是目前并沒有將RT Thread移植到BL602的成熟方案,并且移植具有一定的難度。針對這一現(xiàn)象,本文提出了將RT Thread移植到BL602的方法和關(guān)鍵步驟。
1 軟硬件環(huán)境概述
1.1 硬件概述
本文所采用的BL602 芯片使用RISCV 架構(gòu)的CPU,其超低功耗的電源管理單元可用于高性能應(yīng)用開發(fā),采用外部時鐘源可以獲得高精度和穩(wěn)定的時鐘,另外還可以選配閃存(Flash),高速緩存可以加快CPU 訪問存儲器的速率,大大提高CPU 利用率和程序執(zhí)行速率。
1.2 軟件準(zhǔn)備
本文采用RT Thread 3.1.1標(biāo)準(zhǔn)版本的源碼進(jìn)行裁剪移植,為了避免從頭開始編寫代碼,提前在博流官網(wǎng)下載bl_mcu_sdk代碼用作參考。
2 RT Thread工程框架啟動原理
2.1 總體啟動流程
整個工程啟動流程分為BL602芯片啟動和RT Thread實時內(nèi)核啟動。該過程與U boot啟動過程類似。對于前者,芯片上電后會首先從start.S匯編代碼處開始執(zhí)行,最后通過調(diào)用entry()進(jìn)入應(yīng)用程序入口,進(jìn)而調(diào)用內(nèi)核啟動函數(shù)rtthread_startup()將系統(tǒng)控制權(quán)轉(zhuǎn)移給RT Thread,具體流程如圖1所示。
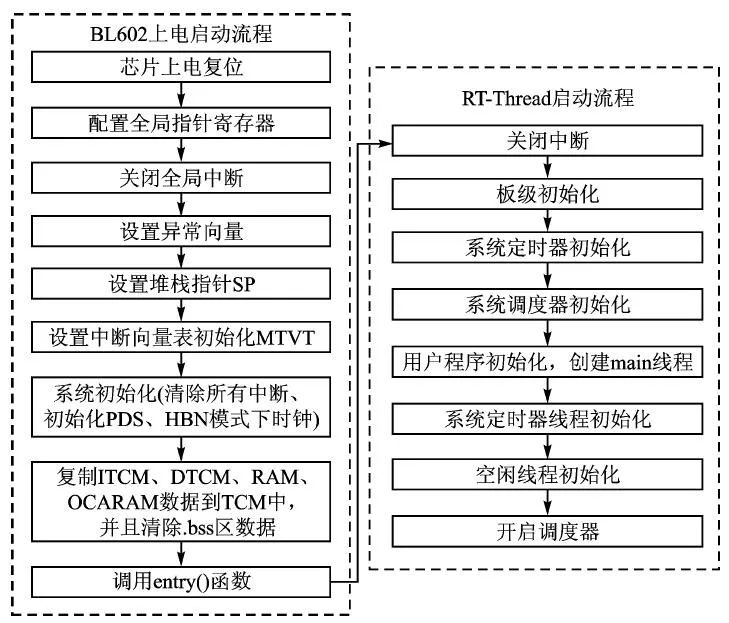
圖1 總體啟動流程
2.2 RT Thread實時內(nèi)核啟動流程
RT Thread實時內(nèi)核啟動主要由rtthread_startup()函數(shù)完成,主要進(jìn)行板級初始化、打印RT Thread版本信息、定時器初始化、調(diào)度器初始化、應(yīng)用程序初始化、定時器線程初始化、空閑線程初始化、調(diào)度器啟動。
2.2.1 板級初始化
板級初始化過程就是通過調(diào)用rt_hw_board_init()函數(shù)實現(xiàn),對于不同型號的芯片,該函數(shù)所要處理的任務(wù)大同小異,一般都是初始化芯片引腳和串口、配置系統(tǒng)時鐘、初始化堆空間。對于BL602芯片,因其內(nèi)部自帶了一個64位的定時器mtimer,將會對該定時器進(jìn)行初始化以設(shè)置系統(tǒng)定時時間,其作用與STM32芯片中的嘀嗒時鐘類似。
2.2.2 定時器初始化
調(diào)用rt_system_timer_init()函數(shù)初始化的是硬件中斷模式下的定時器,RT Thread的硬件定時器由一個靜態(tài)的雙向鏈表構(gòu)成,剛開始初始化定時器隊列為空,即L>next=L >pre=L,具體結(jié)構(gòu)如圖2所示。
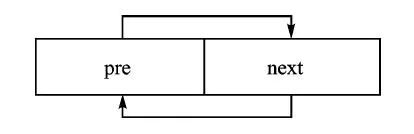
圖2 初始化后的定時器結(jié)構(gòu)
2.2.3 調(diào)度器初始化
調(diào)度器用于調(diào)度線程運行,在當(dāng)前系統(tǒng)的就緒隊列中找到優(yōu)先級最高的就緒線程來執(zhí)行,RTThread中線程一共有32個等級的優(yōu)先級,數(shù)值越大,優(yōu)先級越低。調(diào)度器初始化主要對線程優(yōu)先隊列進(jìn)行初始化為NULL,設(shè)置當(dāng)前線程優(yōu)先級:RT_THREAD_PRIORITY_MAX-1=31為最低的優(yōu)先級,初始化線程控制塊指針為NULL,初始化線程就緒優(yōu)先級組為0。
2.2.4 應(yīng)用程序初始化
通過調(diào)用rt_application_init()來動態(tài)創(chuàng)建main主線程,在線程函數(shù)main_thread_entry()調(diào)用main(),從而進(jìn)入用戶主函數(shù)。不過此時線程并沒有啟動,而是根據(jù)優(yōu)先級插入到了線程就緒優(yōu)先隊列指定位置,等到調(diào)度器啟動后才會真正運行主線程。
2.2.5 調(diào)度器啟動
通過調(diào)用rt_system_scheduler_start()啟動調(diào)度器,main線程、idle線程才會真正被調(diào)度,系統(tǒng)會從線程就緒隊列中選擇優(yōu)先級最高的一個線程并執(zhí)行。如果系統(tǒng)的就緒隊列中還有線程1(優(yōu)先級為7)、線程2(優(yōu)先級為10)、線程3(優(yōu)先級為7)、tshell(優(yōu)先級為20)四個線程。當(dāng)調(diào)度器啟動后,系統(tǒng)中各個線程指向關(guān)系如圖3所示。
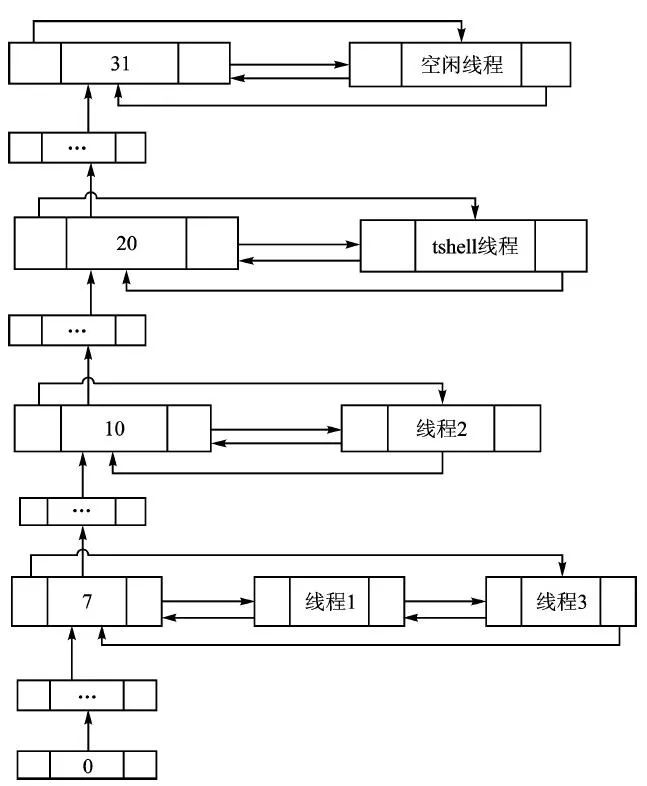
圖3 線程指向關(guān)系
3 RT Thread移植過程
RT Thread移植就是讓RTThread實時操作系統(tǒng)能夠在BL602芯片上跑起來,并且可以實現(xiàn)任務(wù)管理、任務(wù)創(chuàng)建、任務(wù)調(diào)度等功能。移植過程主要分為以下幾個部分:啟動入口、系統(tǒng)時鐘配置、mtimer定時器配置、注冊中斷回調(diào)函數(shù)、實現(xiàn)Finsh功能、rt_kprintf實現(xiàn)、任務(wù)創(chuàng)建和任務(wù)調(diào)度。下面將對具體步驟進(jìn)行詳細(xì)介紹。
3.1 添加單板BL602和修改源碼目錄
為了移植最小內(nèi)核到BL602芯片上,有必要對RT Thread源碼進(jìn)行裁剪。保留src、include目錄文件不變,components目錄下面只保留finsh文件夾,bsp目錄下添加BL602單板目錄,在libcpu/risc_v目錄下新建一個bl602文件夾,向libcpu/risc_v/bl602中添加對應(yīng)的 interrupt_gcc.S、cpuport.c、context_gcc.S,這幾個匯編和C文件可以從其他RISC V 架構(gòu)下的芯片中復(fù)制,CPU 架構(gòu)移植主要實現(xiàn)如下功能:中斷使能/失能、任務(wù)切換、線程棧初始化、中斷處理等。把bl_mcu_sdk中的drivers/soc/bl602/startup/start.S 啟動文件復(fù)制到libcpu/risc_v/bl602目錄下,作為芯片上電啟動文件。rtconfig.h頭文件中定義了一些預(yù)編譯宏,只需定義一些基本的宏就行,至此源碼裁剪工作基本完成。
3.2 修改入口函數(shù)
裸機(jī)程序中啟動文件start.S中最后幾行匯編指令如下所示(現(xiàn)在需要修改jal main為 jalentry,從而跳轉(zhuǎn)到應(yīng)用程序入口調(diào)用rtthread_startup()啟動函數(shù)啟動內(nèi)核,至此系統(tǒng)控制權(quán)就轉(zhuǎn)交給了操作系統(tǒng)):
//系統(tǒng)初始化,保存默認(rèn)配置、清除所有中斷
jal SystemInit
/*從ITCM、DTCM、RAM 復(fù)制數(shù)據(jù)到TCM 中,并且清空.bss區(qū)*/
jal start_load
//設(shè)置PDS、HBN時鐘
jal System_Post_Init
……
//跳轉(zhuǎn)到用戶主程序
jal main 修改為jalentry
3.3 適配板級初始化函數(shù)
對開發(fā)板的初始化操作一般都在rt_hw_board_init()接口進(jìn)行,比如系統(tǒng)時鐘初始化、外設(shè)時鐘初始化、定時器初始化、串口初始化、GPIO初始化、堆初始化等。
3.3.1 系統(tǒng)時鐘初始化
視系統(tǒng)需求,外部晶振時鐘可選24、32、38.4、40 MHz,可以設(shè)置外部晶振XTAL為40 MHz,配置系統(tǒng)時鐘為最高的192 MHz。通過配置clk_cfg0寄存器(地址為0x40000000)的bit[0:3]為1,使能PLLCLK、BCLK、FCLK、HCLK;通過設(shè)置bit[4:5]都為1,選擇PLL輸出時鐘為192 MHz;設(shè)置bit[6:7]都為1,選擇root clock來自RC32M(RC振蕩器頻率為32 MHz);最后選擇PLL 輸出192MHz作為system clock。
3.3.2 外設(shè)時鐘初始化
首先使能外圍設(shè)備時鐘,然后再進(jìn)行配置。BL602芯片的外圍設(shè)備時鐘包括Flash、UART、I2C、GPIO 等,這里只用到了UART 外圍設(shè)備,bl_mcu_sdk在peripheral_clock_init()只需要執(zhí)行兩個操作:一是使能UART 時鐘(通過寫0x4000 0024的第16位為1);二是配置UART時鐘為160 MHz(通過配置0x40000008的bit7為選擇時鐘源,通過0x4000 0008的bit[0:2]設(shè)置分頻系數(shù)為0,設(shè)置bit4為1使能串口時鐘)。
3.3.3 配置mtimer定時器
mtimer定時器是RISC V 內(nèi)核自帶的一個64位定時器,可以通過配置0x4000 0090寄存器來使能mtimer時鐘和選擇時鐘類型,還可以選擇分頻系數(shù),與STM32芯片里面的嘀嗒時鐘類似。bl_mcu_sdk的中斷采用vector mode,一共有18個中斷源,中斷號0~15為RISCV保留中斷,而mtimer中斷號是7,UART0中斷號是(IRQ_NUM_BASE+29),其中IRQ_NUM_BASE為16,可以在rt_hw_board_init()中調(diào)用bflb_mtimer_config(1000000,SysTick_Handler),從而將mtimer中斷號與中斷服務(wù)函數(shù)SysTick_Handler綁定在一起,假如時鐘經(jīng)過分頻以后為 1 MHz,經(jīng)過以上設(shè)置后,mtimer定時時間即為1 s。
3.3.4 串口初始化
主要對引腳和UART 外設(shè)進(jìn)行初始化,bl_mcu_sdk中有個函數(shù)已經(jīng)實現(xiàn)該功能,可以直接在rt_hw_board_init()里調(diào)用console_init(),該函數(shù)里面調(diào)用bflb_gpio_uart_init()實現(xiàn)了GPIO輸入輸出引腳的初始化以及調(diào)用bflb_uart_init()實現(xiàn)了uart0初始化。
3.3.5 堆初始化
和其他操作系統(tǒng)不同的是,RT Thread堆空間大小由程序員自定義的一個靜態(tài)數(shù)組heap_buf[]決定,數(shù)組大小不能超過SRAM 最大值,然后通過rt_system_heap_init(begin_addr, end_addr)函數(shù)對堆空間的起始和終止地址進(jìn)行初始化,此處應(yīng)為heap_buf和(heap_buf + sizeof(heap_buf) 1),并對begin_addr進(jìn)行向上4字節(jié)對齊操作,對end_addr進(jìn)行向下4字節(jié)對齊操作。在rtconfig.h頭文件中定義RT_USING_HEAP 宏后才能動態(tài)創(chuàng)建main主線程,否則只能通過靜態(tài)方法創(chuàng)建線程。
3.4 實現(xiàn)rt_kprintf功能
要想實現(xiàn)RT Thread的打印功能,其實就是實現(xiàn)rt_hw_console_output()函數(shù)向串口輸出數(shù)據(jù),BL602參考手冊里面有兩個寄存器需要設(shè)置:一個是uart_fifo_config_1,地址為:0x4000 a084,需要設(shè)置bit[0:5]位用于TX FIFO可用計數(shù);另外一個是uart_fifo_wdata,地址為:0x4000a088,用來將一個字符寫進(jìn)0x4000 a088地址里,bl_mcu_sdk里面已經(jīng)實現(xiàn)過該部分,直接在rt_hw_console_output()里面調(diào)用即可,至此可以通過串口uart0輸出數(shù)據(jù)。
3.5 移植Finsh
移植Finsh組件,實現(xiàn)命令行交互功能,首先需要添加Finsh代碼,在rtconfig.h頭文件中定義RT_USING_FINSH以及與Finsh線程相關(guān)的一些宏定義,然后對接rt_hw_console_getchar()函數(shù)即可,其中獲取字符有兩種方式:采用查詢方式或者中斷方式,建議采用中斷方式獲取字符。
3.5.1 查詢方式
查詢方式下不能使能串口接收中斷,且此方法相較于中斷方式較為簡單,不過效率很低,需要對兩個寄存器進(jìn)行配置:一個是uart_fifo_config_1,地址為0x4000 a084,需要設(shè)置bit[8:13]用于RX FIFO 可用計數(shù);另外一個是uart_fifo_rdata,地址為0x4000 a08c,用于從0x4000 a08c地址中讀取一個字符到串口。
3.5.2 中斷方式
采取中斷方式必須使能串口接收中斷,參考BL602數(shù)據(jù)手冊得知,可以通過配置uart_int_en寄存器bit3使能串口接收中斷,寄存器地址為0x4000 a02c。中斷方式獲取字符流程如下:定義一個buffer緩沖區(qū)和一個信號量,當(dāng)uart接收產(chǎn)生中斷時,會在中斷服務(wù)函數(shù)中將讀取到的數(shù)據(jù)緩存到buffer緩沖區(qū),然后釋放信號量來通知finsh線程接收數(shù)據(jù),finsh線程將從緩沖區(qū)中讀取數(shù)據(jù)。所以還需要實現(xiàn)串口接收中斷服務(wù)函數(shù)Uart_IRQHandler,并通過bflb_irq_attach(45, Uart_IRQHandler)將UART0中斷號與之綁定在一起,UART0中斷號為(IRQ_NUM_BASE+29),IRQ_NUM_BASE為16。
4 測試結(jié)果
操作系統(tǒng)啟動后,會自動創(chuàng)建main、idle、tshell線程。下面將在main函數(shù)中動態(tài)創(chuàng)建3個線程,將線程1、3優(yōu)先級設(shè)置為7,線程2優(yōu)先級設(shè)置為10,tick都設(shè)置為10,在線程函數(shù)中都同時延時1 s,觀察打印出的當(dāng)前線程數(shù)量是否正確以及各個線程是否按照優(yōu)先級正確被調(diào)度執(zhí)行。實驗結(jié)果表明,RT Thread操作系統(tǒng)能夠在BL602上穩(wěn)定運行,并且可以正常進(jìn)行線程創(chuàng)建和調(diào)度,測試結(jié)果如圖4所示。
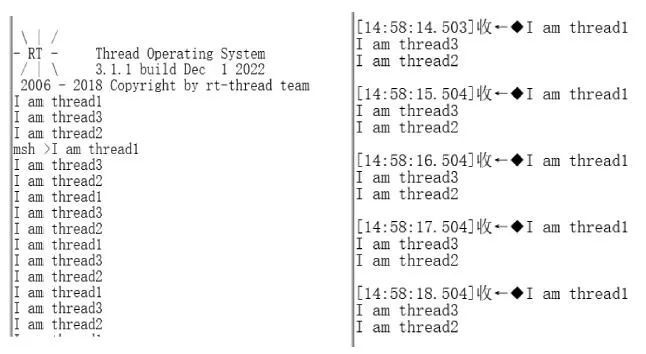
圖4 測試結(jié)果
5 結(jié) 語
本文在介紹了RT Thread實時操作系統(tǒng)基礎(chǔ)上講解了如何在BL602芯片上成功移植RT Thread實時操作系統(tǒng)的方法。最后在BL602上進(jìn)行測試,可以正常運行,為其他RTOS移植到芯片上提供了參考和借鑒。
(本文由《單片機(jī)與嵌入式系統(tǒng)應(yīng)用》雜志授權(quán)發(fā)表,原文刊發(fā)在2023年第10期)
-
嵌入式
+關(guān)注
關(guān)注
5068文章
19021瀏覽量
303329 -
操作系統(tǒng)
+關(guān)注
關(guān)注
37文章
6742瀏覽量
123192 -
微處理器
+關(guān)注
關(guān)注
11文章
2247瀏覽量
82322 -
移植
+關(guān)注
關(guān)注
1文章
377瀏覽量
28111 -
RTThread
+關(guān)注
關(guān)注
8文章
132瀏覽量
40811
原文標(biāo)題:基于BL602的RT Thread移植方法研究
文章出處:【微信號:麥克泰技術(shù),微信公眾號:麥克泰技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦

i.MX RT1170:VGLite移植RT-Thread Nano過程講解(下)
從μCOS-Ⅱ到RT-Threadの移植方法是什么
【博流 BL-HWC-G1 開發(fā)板試用】讓博流 BL602 連接互聯(lián)網(wǎng) —— 使用 BL IoT SDK 通過 Wi-Fi 聯(lián)網(wǎng)發(fā)出 HTTP GET 請求獲取數(shù)據(jù)
RT-Thread移植方法分享
基于SIFIVE E24的BL602與BL702移植過程
移植RT-Thread的原理與方法
【國產(chǎn)MCU移植】移植RT-Thread到國產(chǎn)芯片HC32F460PETB

【國產(chǎn)MCU移植】移植RT-Thread到國產(chǎn)芯片F(xiàn)M33LC026





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論