") PWM波的產(chǎn)生過(guò)程?如何觸發(fā)ADC呢?
PWM波的產(chǎn)生過(guò)程?如何觸發(fā)ADC呢?
PWM脈寬調(diào)制技術(shù)在控制領(lǐng)域中是非常常用的技術(shù),電機(jī)控制、電源控制等都是通過(guò)PWM進(jìn)行驅(qū)動(dòng)IGBT或MOSFET等開關(guān)器件進(jìn)行相關(guān)控制的。
目前所在公司的項(xiàng)目中需要用到PWM驅(qū)動(dòng)功率放大電路,用以控制電流輸出,同時(shí)也是通過(guò)EPWM觸發(fā)ADC進(jìn)行采樣電流,故此進(jìn)行學(xué)習(xí)總結(jié)。
本次總結(jié)主要有以下內(nèi)容:
1、PWM波的產(chǎn)生過(guò)程;
2、如何觸發(fā)ADC?
1、PWM的介紹
1.1 時(shí)鐘
我一直在強(qiáng)調(diào)時(shí)鐘的重要性,因?yàn)闆](méi)有時(shí)鐘,芯片的很多外設(shè)模塊是無(wú)法工作的,在你編程的過(guò)程中可能就會(huì)遇到因?yàn)闆](méi)有使能時(shí)鐘導(dǎo)致模塊無(wú)法工作的情況,所以當(dāng)你的程序其他配置沒(méi)有問(wèn)題,卻無(wú)法進(jìn)行具體的寄存器操作時(shí),你應(yīng)該考慮查看是否打開了時(shí)鐘。
EPWM的時(shí)基模塊工作需要的時(shí)鐘信號(hào),通過(guò)對(duì)系統(tǒng)時(shí)鐘的分頻得到時(shí)基時(shí)鐘(紅圈1)進(jìn)行設(shè)置,主要是通過(guò) 時(shí)基控制寄存器(TBCTL) 的高速時(shí)基時(shí)鐘分頻位 **HSPCLKDIV[9:7] 和時(shí)基時(shí)鐘分頻位 CLKDIV[12:10] **進(jìn)行分頻設(shè)置,通常設(shè)置為 1分頻 ,即 時(shí)基時(shí)鐘為系統(tǒng)時(shí)鐘 。
TBCLK = SYSCLKOUT / (HSPCLKDIV * CLKDIV)
// 設(shè)置TBCLK
EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0x0U;
EPwm1Regs.TBCTL.bit.CLKDIV = 0x0U;

注意: TBCLK時(shí)基時(shí)鐘是否使能,EPWM模塊時(shí)鐘是否使能(如下圖Figure1),對(duì)TBCLK時(shí)基時(shí)鐘以及使用的EPWM1模塊時(shí)鐘進(jìn)行使能,在程序中(DSP2833x_SysCtrl.c中)置1,具體程序如下所示:
SysCtrlRegs.PCLKCR1.bit.EPWM1ENCLK = 1; // ePWM1
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; // Enable TBCLK within the ePWM
1.2 ePWM結(jié)構(gòu)及組成單元
F28335的PWM模塊是加強(qiáng)模塊,這個(gè)加強(qiáng)表現(xiàn)在它各個(gè)ePWM的獨(dú)立性,每個(gè)ePWM小模塊都由兩路ePWM輸出組成,分別為ePWMxA和ePWMxB,這一對(duì)PWM輸出,可以配置成三種輸出:
- 兩路獨(dú)立的單邊沿PWM輸出;
- 兩路獨(dú)立的但互相對(duì)稱的雙邊沿PWM輸出;
- 一對(duì)雙邊沿非對(duì)稱的PWM輸出;
DSP28335共有18路PWM,6組 * 2 EPWM(A、B)+ 6路APWM,結(jié)構(gòu)圖如下所示。
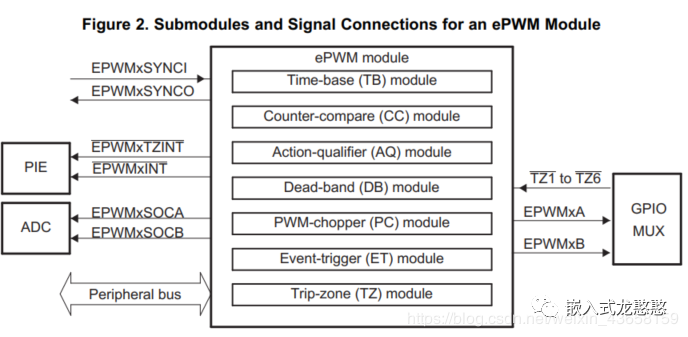
每組EPWM包括7個(gè)模塊:
時(shí)基模塊TB
比較計(jì)數(shù)模塊CC
動(dòng)作模塊AQ
死區(qū)模塊DB
斬波模塊DC
事件觸發(fā)模塊ET
錯(cuò)誤聯(lián)防模塊TZ
每個(gè)模塊各自作用如下:
TB :為輸出PWM產(chǎn)生始終基準(zhǔn)TBCLK,配置PWM的時(shí)鐘基準(zhǔn)計(jì)數(shù)器TBCTR,設(shè)置計(jì)數(shù)器的計(jì)數(shù)模式,配置硬件或軟件同步時(shí)鐘基準(zhǔn)計(jì)數(shù)器,確定ePWM同步信號(hào)輸出源;
CC:確定PWM占空比,以及ePWM輸出高低電平切換時(shí)間;
AQ:確定計(jì)數(shù)器和比較寄存器匹配時(shí)產(chǎn)生動(dòng)作,即ePWM 高低電平的切換;
DB:配置輸出PWM上升沿或下降沿延時(shí)時(shí)間,也可以將A、B兩通道配置成互補(bǔ)模式,我做的逆變器就是將ePWM配置成互補(bǔ)模式。死區(qū)時(shí)間可以編程確定;
PC:產(chǎn)生高頻PWM載波信號(hào);
TZ:當(dāng)外部有錯(cuò)誤信號(hào)產(chǎn)生時(shí),對(duì)PWM輸出進(jìn)行相應(yīng)處理,比如全置高,或拉低,或置為高阻態(tài),從而起到保護(hù)作用。當(dāng)然該功能也可以通過(guò)軟件強(qiáng)制產(chǎn)生;
EZ:使能ePWM中斷,使能ePWM觸發(fā)ADC采樣,確定事件產(chǎn)生觸發(fā)的速度和清除相關(guān)事件標(biāo)志位。
ePWM模塊的7個(gè)模塊就像一條生產(chǎn)線,一級(jí)一級(jí)的經(jīng)過(guò),但DSP更高級(jí),可以實(shí)現(xiàn)通過(guò)配置,使得ePWM只經(jīng)過(guò)我選擇的生產(chǎn)線,沒(méi)有被選擇上的就不要經(jīng)過(guò)。
例如,死區(qū)控制模塊可以需要也可以不需要,這就看實(shí)際系統(tǒng)需不需要了。在實(shí)際使用ePWM時(shí),正常的發(fā)出PWM波往往只要要配置TB、CC、AQ、DB、ET五個(gè)模塊。
上面講了那么多,那PWM波到底是如何產(chǎn)生的呢?接下來(lái)就開始講解這個(gè)問(wèn)題。
2、PWM的產(chǎn)生
2.1 時(shí)基模塊-設(shè)置PWM產(chǎn)生的三種模式
PWM產(chǎn)生的三種模式分別為:up模式、down模式、up-down模式。
PWM產(chǎn)生的本質(zhì)是信號(hào)通過(guò)與載波比較,根據(jù)設(shè)置輸出高低電平,占空比由一個(gè)周期內(nèi)高電平的時(shí)間決定。 在實(shí)際實(shí)現(xiàn)上,載波通過(guò)計(jì)數(shù)器計(jì)數(shù)得到,其周期值TBPRD即為載波計(jì)數(shù)最大值(峰值),信號(hào)是根據(jù)具體需求經(jīng)過(guò)PI控制器輸出得到,與載波進(jìn)行比較后產(chǎn)生相應(yīng)占空比。如up-down模式,如下圖1-2-1所示。

2.2 周期和頻率的計(jì)算
1、up和down模式是向上計(jì)數(shù)和向下計(jì)數(shù),其周期和頻率的計(jì)算公式一致,為:
Tpwm = (TBPRD+1)* t_TBCLK
Fpwm= 1 / Tpwm
2、up-down模式是先向上計(jì)數(shù)后向下計(jì)數(shù),其周期和頻率的計(jì)算公式為:
Tpwm = 2 * TBPRD*t_TBCLK
Fpwm= 1 / Tpwm
在實(shí)際開發(fā)中,一般選用up-down模式,較前兩種模式優(yōu)勢(shì)在于增長(zhǎng)平滑,無(wú)較大突變,更適合實(shí)際應(yīng)用。
實(shí)際設(shè)置PWM的頻率為10KHz,TBCLK為150MHz,則可計(jì)算出周期為:
PRD = 150 000 000 / (10 000 * 2)= 7500
2.3 計(jì)數(shù)比較模塊-比較事件產(chǎn)生,決定占空比
計(jì)數(shù)比較模塊主要是通過(guò)時(shí)基計(jì)數(shù)的值與比較寄存器CMPA、CMPB進(jìn)行比較,比如圖1-2-1的值3900設(shè)置為CMPA的值,根據(jù)設(shè)置,當(dāng)計(jì)數(shù)值大于或小于CMPA的值,AQ進(jìn)行相應(yīng)動(dòng)作(置高或置低),就能得到相應(yīng)占空比的PWM波。
比較主要有四種情況:
1、TBCTR = CMPA,PWM根據(jù)AQ動(dòng)作;
2、TBCTR = CMPB,PWM根據(jù)AQ動(dòng)作;
3、TBCTR = PRD,PWM根據(jù)AQ動(dòng)作;
4、TBCTR = 0,PWM根據(jù)AQ動(dòng)作;
注意: up或down模式只比較一次,而up-down模式比較兩次。
實(shí)際過(guò)程中,比較的這個(gè)值時(shí)不斷變化的,根據(jù)具體需求(參考值)通過(guò)PID控制器在不斷調(diào)整,輸出不同占空比的PWM,達(dá)到控制的目的。
2.3 動(dòng)作模塊AQ–根據(jù)比較結(jié)果動(dòng)作,決定占空比
動(dòng)作模塊AQ根據(jù)動(dòng)作模塊寄存器AQCTLA、AQCTLB的設(shè)置對(duì)比較事件進(jìn)行動(dòng)作。
主要有四種動(dòng)作模式:
1、不動(dòng)作
2、置低
3、置高
4、翻轉(zhuǎn)
動(dòng)作模塊事件優(yōu)先級(jí)
不同模式下的動(dòng)作事件是有優(yōu)先級(jí)的,up-down模式在向上計(jì)數(shù)和向下計(jì)數(shù)的過(guò)程中,事件優(yōu)先級(jí)不一樣。所有模式下,軟件強(qiáng)制事件的優(yōu)先級(jí)最高。
至此,PWM的產(chǎn)生基本得到解答。具體是:
1、設(shè)置TBCLK時(shí)鐘以及模塊時(shí)鐘使能;
2、選擇up-down模式,確定頻率,得到周期值;
3、確定比較事件以及動(dòng)作模式,決定PWM的占空比,即可得到PWM波。=
3、如何觸發(fā)ADC?
這里主要講解一下思路。
觸發(fā)ADC的事件主要涉及到PWM模塊的事件觸發(fā)模塊ET,根據(jù)時(shí)基模塊和計(jì)數(shù)比較模塊輸入的比較事件以及CTR_Dir時(shí)基計(jì)數(shù)方向產(chǎn)生相應(yīng)事件,設(shè)置事件觸發(fā)選擇寄存器ETSEL,選擇觸發(fā)ADC啟動(dòng)轉(zhuǎn)換或進(jìn)行中斷請(qǐng)求。
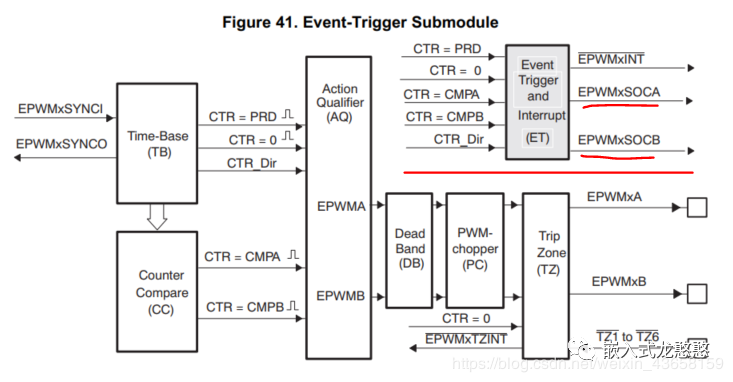
ADC啟動(dòng)轉(zhuǎn)換觸發(fā)信號(hào)為EPWMxSOCA和EPWMxSOCB,根據(jù)ADC的設(shè)置選擇某個(gè)信號(hào)或兩個(gè)信號(hào)。
觸發(fā)ADC啟動(dòng)轉(zhuǎn)換的具體設(shè)置為:
1、設(shè)置哪種觸發(fā)事件,
TBCTR = CMPA
TBCTR = CMPB
TBCTR = PRD
TBCTR = 0
2、什么事件模式下情況觸發(fā)
每個(gè)事件、每2個(gè)事件、每3個(gè)事件,一般是設(shè)置為每個(gè)事件觸發(fā)ADC啟動(dòng)轉(zhuǎn)換。
-
功率放大器
+關(guān)注
關(guān)注
102文章
3518瀏覽量
131653 -
寄存器
+關(guān)注
關(guān)注
31文章
5317瀏覽量
120008 -
逆變器
+關(guān)注
關(guān)注
283文章
4689瀏覽量
206299 -
ADC驅(qū)動(dòng)器
+關(guān)注
關(guān)注
0文章
35瀏覽量
13925 -
PWM波
+關(guān)注
關(guān)注
0文章
99瀏覽量
16842
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
TTL和CMOS中△I噪聲的產(chǎn)生過(guò)程與基本特點(diǎn)分析
STM32L151定時(shí)器上升沿觸發(fā)ADC采樣,為什么每個(gè)PWM周期內(nèi)會(huì)觸發(fā)第二次采樣?
PWM波產(chǎn)生的方法及原理
ADC的PWM觸發(fā)力矩困難
PWM觸發(fā)ADC延時(shí)采樣
用定時(shí)器TIM產(chǎn)生PWM波來(lái)控制ADC的采樣頻率
怎么知道產(chǎn)生的PWM波形對(duì)不對(duì)呢
TMS320F28335時(shí)鐘電路的主頻時(shí)鐘產(chǎn)生過(guò)程是怎樣的
如何實(shí)現(xiàn)定時(shí)器TIM3輸出PWM波觸發(fā)ADC采樣呢
pwm波產(chǎn)生驅(qū)動(dòng)電機(jī)
如何使用PWM觸發(fā)ADC和PWM剎車功能來(lái)阻止PWM輸出
如何使用PWM觸發(fā)ADC和PWM剎車功能來(lái)阻止PWM輸出
PWM波產(chǎn)生電路圖
PWM硬件間隔觸發(fā)ADC






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論