 位置控制和力控制的差異在哪里
位置控制和力控制的差異在哪里
六維力傳感器是機器人力控解決方案中應用最廣泛的傳感器之一,其性能更好,成本也相對較高。通過使用六維力傳感器,URe系列機器人可以更好地感知其操作環境,從而進行更精確的操作,提高生產效率和質量。
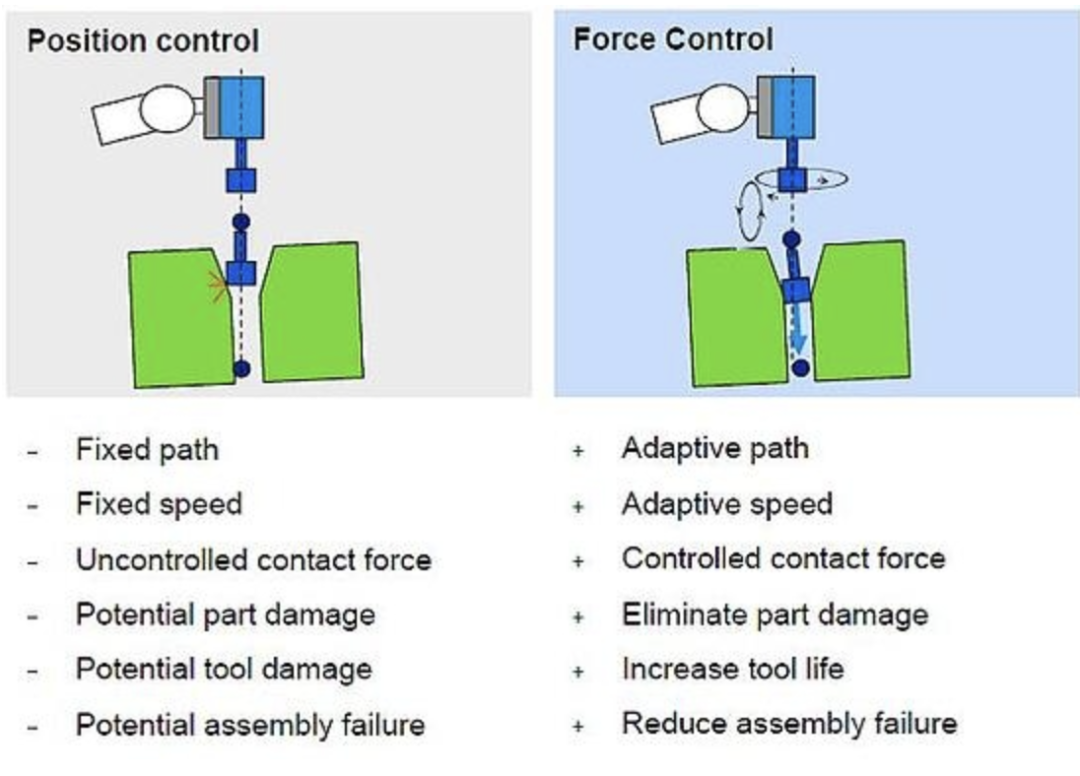
機器人位置控制和力控制的主要區別在于它們各自的主要控制目標和應用場景。
位置控制主要關注的是機器人末端執行器的位置和姿態。在位置控制模式下,機器人會嚴格按照預先設定的位置軌跡進行運動。
這種控制方式主要用于那些對精度和穩定性要求較高的任務,例如焊接、裝配等。在位置控制中,如果機器人遇到阻礙,如遇到墻壁或其他物體,機器人的力量控制會啟動,以避免對機器人和環境造成損害。
力控制的主要目標是控制機器人與環境之間的作用力。在力控制模式下,當機器人遇到阻礙時,它會智能地調整預設位置軌跡,從而消除內力。
這種方法更注重的是機器人與環境之間的交互,而不僅僅是機器人的運動軌跡。
位置控制和力控制在以下方面存在差異:
- 控制目標:位置控制的目標是使機器人的末端執行器達到預設的位置和姿態,而力控制的目標是使機器人與環境之間的作用力在可接受的范圍內。
- 應用場景:位置控制適用于對精度和穩定性要求較高的任務,如焊接、裝配等。力控制則更適用于人機協作、康復訓練和柔順生產等領域。
3.安全性:在位置控制中,如果機器人遇到阻礙,機器人的力量控制會啟動,以避免對機器人和環境造成損害。而在力控制中,機器人會智能地調整預設位置軌跡,從而消除內力,安全性更高。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28205瀏覽量
206532 -
力控
+關注
關注
0文章
22瀏覽量
7854 -
位置控制
+關注
關注
0文章
23瀏覽量
9424
發布評論請先 登錄
相關推薦
NANDFLASH燒寫的位置在哪里?
在將程序燒寫到NANDFLASH時,請問燒寫的位置在哪里,是從首塊首地址開始嗎?如果我想往NANDFLASH的某些位置進行擦寫動作,要避開有用的程序代碼部分。如何查看
發表于 03-26 06:45
一千元與一萬元電視差異到底在哪里
在8月17日拼多多推出了JVC品牌智能電視,用1999元創造了65英寸液晶電視價格新低,與最貴的同尺寸液晶電視差價近10倍。在巨大差價面前不禁讓人疑惑,都是液晶電視,一千元與一萬元電視差異到底在哪里?
微控制器的主要應用在哪里
微控制器又稱為單片機,是一種集成在芯片上的微型計算機,用于控制嵌入式系統中的特定操作,那么微控制器的主要應用在哪里?接下來將為您揭曉。
什么是機器人的力控制?有力控制后還需要位置控制嗎
力控制一般泛指機器人應用領域中,利用力傳感器作為反饋裝置,將力反饋信號與位置控制(或速度控制)輸入信號相結合,通過相關的
雷達信號有什么特點?和通信信號的差異在哪里呢?
先學好數字信號處理的知識,才能慢慢的理解雷達信號處理!先來看看雷達信號有什么特點?和通信信號的差異在哪里呢?載波的信息都是有用的,但各自用的肯定不一樣!
網線有無屏蔽層的差異在哪里
從結構角度來看,屏蔽層是最直觀區別屏蔽網線和非屏蔽網線的一個外觀,那除了屏蔽層這一個不同之處,還有什么不同你清楚嗎?下面就跟著科蘭小編一起來了解一下網線有無屏蔽層的差異在哪里。
PLC和運動控制器的比較,在哪些要求下選用運動控制器?
現在PLC的運動控制功能越來越強了,圓弧插補、螺旋插補、電子凸輪都能輕松勝任了,那運動控制器和具備運動控制功能的PLC的差別在哪里,運動控制

搭建機器人關節力控制系統步驟
搭建機器人關節力控制系統需要以下步驟: 1. 選擇合適的電機和傳感器。電機的選取要符合機器人的要求,例如扭矩和速度范圍。傳感器的選擇則取決于需要監測的參數,如位置、速度和力量。 2. 編寫適當的

閉環控制系統的位置反饋元件應裝在哪里
閉環控制系統,也稱為反饋控制系統,是一種控制系統,其中系統的輸出被測量并與期望的參考值進行比較,然后產生的誤差信號用于調整系統的行為,以減少誤差并使輸出盡可能接近期望值。在閉環控制系統





 工商網監
工商網監
評論