 力控機器人的控制框架和性能評估
力控機器人的控制框架和性能評估
力控機器人是一種能夠基于外部力量進行控制和交互的機器人系統。與傳統的位置控制機器人相比,力控機器人更加靈活和適應性強,能夠實現與環境和人類操作者的安全交互。
力控機器人的核心思想是通過傳感器測量機器人與環境之間的力和力矩,并將其作為控制輸入進行實時調整。它可以感知和響應外部力的大小和方向,從而能夠適應不同的工作環境和任務需求。
力控機器人的控制框架通常包括以下幾個關鍵組件:
- 力傳感器:用于測量機器人與環境之間的力和力矩。常見的力傳感器包括壓力傳感器、力敏電阻、應變計等。
- 控制算法:力控機器人的控制算法根據傳感器反饋的力信息,實時計算出機器人的控制指令。常見的控制算法包括PID控制、阻抗控制和導納控制等。
- 執行器:力控機器人的執行器根據控制指令對機器人進行力和力矩的調整。常見的執行器包括電機、液壓驅動器等。
- 交互界面:力控機器人通常需要與人類操作者進行交互,因此需要設計友好的交互界面,方便操作者監控和調整機器人的行為。
力控機器人的性能評估可以從多個方面進行,其中一些常見的性能指標包括:
1.動態響應:力控機器人的動態響應能力是評估其控制性能的重要指標。它可以通過觀察機器人對外部力的實時調整情況來評估,包括響應速度、穩定性和準確性等。
2.接觸感知和控制:力控機器人的接觸感知和控制能力是評估其與環境交互的重要指標。它包括對接觸力大小和方向的準確感知以及對接觸力的合理調整和控制能力。
3.安全性:力控機器人的安全性是評估其在與人類操作者和環境進行交互時的重要指標。它包括機器人對外部力的感知和應對能力,以及對意外碰撞和異常情況的安全反應能力。
- 精度和穩定性:力控機器人的精度和穩定性是評估其執行力控制任務的重要指標。它包括機器人在施加和維持特定力和力矩時的準確性和穩定性。
通過對力控機器人的性能分析和評估,可以進一步優化其控制算法和系統設計,以提高其交互性能和適應性。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2541文章
49979瀏覽量
747656 -
機器人
+關注
關注
210文章
27847瀏覽量
204655 -
力控
+關注
關注
0文章
22瀏覽量
7840
發布評論請先 登錄
相關推薦
機器人創意工作室:打造最完美的WIFI/藍牙智能小車機器人
! WIFI機器人網·機器人創意工作室論壇致力于打造一個完美的、便捷的、廉價的移動智能家居控制平臺,該平臺基于開源技術,采用openwrt WIFI模組/迷你路由器+普通U-S-B攝像頭方案,構建出一個
發表于 04-20 21:43
什么是工業機器人
自動存入程序存儲器中在機器人自動工作時,控制系統從程序存儲器中檢出相應信息,將指令信號傳給驅動機構,使執行機構再現示教的各種動作。示教輸入程序的工業機器人稱為示教再現型工業機器人。具有
發表于 01-19 10:58
【mBot申請】智能機器人的檢測評估
申請理由:想通過一款適于控制智能機器,可稱之為智能機器人的開發套件,外設加入各類傳感器,實現智能,檢測,反饋為一體的閉環系統,來進行對該類智能機器人的
發表于 11-30 15:56
辰漢-如何實現服務機器人的運算與控制
的能力。紅外模塊可以實現對一些外部電器的操控,電池和電池管理模塊給整個機器人的運轉提供能量。辰漢-硬件結構是實現服務機器人運算和控制的基礎,在高性能嵌入式處理器上運行的操作系統,進行著
發表于 06-09 17:18
六軸工業機器人控制方式
系統的管理、通訊、運動學和動力學計算,并向下級微機發送指令信息;作為下級從機,各關節分別對應一個CPU,進行插補運算和伺服控制處理,實現給定的運動,并向主機反饋信息。根據作業任務要求的不同,機器人的控制方式又可分為點位
發表于 08-09 16:30
機器人、協作機器人和移動機器人,你分的清楚嗎
),除非風險評估另有要求。 適當的風險評估可以根據ISO 13849:2006的附錄A進行,但自2016年起,R15.306已成為機器人專用的風險評估方法。進行風險
發表于 10-30 11:33
如何設計智能滅火機器人控制器?
席文姣,陳帝伊,馬孝義(西北農林科技大學 水利與建筑工程學院,陜西 西安712100)0引言如何設計智能滅火機器人控制器?控制器是智能機器人處理和控
發表于 07-31 06:23
機器人是什么?
的機器。一些書呆子式的語言可能會把它描述成“一個可重新編程的多功能機械手,旨在通過各種編程的動作移動材料、部件、工具或專門設備,以完成各種任務”。這個定義非常具有表現力。那么制造機器人的要素是什么呢
發表于 03-31 10:31

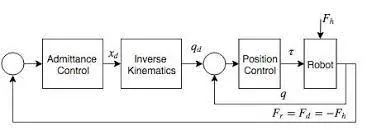
力控機器人導納控制框架
執行器,以實現所需的運動軌跡。 環境建模與識別:用于對環境進行感知和識別,以幫助機器人適應環境變化。 性能分析: ?導納響應性能:評估導納控制





 工商網監
工商網監
評論