 力控機器人導納控制框架
力控機器人導納控制框架
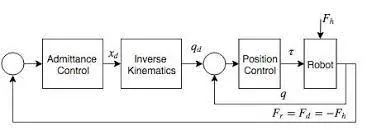
導納控制框架:
導納控制器:根據傳感器測量值和期望的力/力矩指令,生成控制指令以實現期望的導納互動。
運動控制器:用于控制機器人的關節或末端執行器,以實現所需的運動軌跡。
環境建模與識別:用于對環境進行感知和識別,以幫助機器人適應環境變化。
性能分析:
?導納響應性能:評估導納控制器對外部力變化的響應速度和穩定性。
?導納參數分析:分析導納控制器中的參數對系統性能的影響,如導納剛度和導納阻尼等參數。
?導納穩定性分析:評估導納控制系統的穩定性,包括導納穩定性邊界和導納參數的穩定性范圍。
?動態性能分析:分析導納控制器對不同頻率的外部力變化的動態響應性能。
% 定義導納控制參數
Md = 5;
Bd = 10;
Kd = 20;
% 定義機械臂質量和初始位置
m = 1;
x = 0;
xdot = 0;
% 定義期望位置和速度
xd = 1;
xdot_d = 0;
% 定義時間步長和仿真時間
dt = 0.01;
T = 5;
% 初始化位置數組
x_arr = zeros(1, T/dt);
% 進行導納控制仿真
for i = 1:T/dt
% 計算外部力
F_ext = 10 * sin(i*dt);
% 計算期望加速度
xddot_d = (F_ext - Bd*(xdot-xdot_d) - Kd*(x-xd)) / Md;
% 計算控制力
F = m * xddot_d - Bd * xdot - Kd * x;
% 更新位置和速度
xdot = xdot + (F + F_ext) / m * dt;
x = x + xdot * dt;
% 存儲位置
x_arr(i) = x;
end
% 繪制位置圖像
t = 0:dt:T-dt;
plot(t, x_arr)
title('Position')
仿真結果如下:

通過對力控機器人交互控制框架的性能分析,可以評估和優化系統的穩定性、精度、響應性能和適應性,以實現與外部環境或操作者的高效、安全和可靠的力互動。
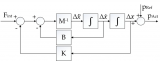
阻抗控制與導納控制框圖分別如圖(a)與(b)所示:

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2541文章
49963瀏覽量
747544 -
機器人
+關注
關注
210文章
27839瀏覽量
204611 -
力控
+關注
關注
0文章
22瀏覽量
7840
發布評論請先 登錄
相關推薦
什么是工業機器人
自動存入程序存儲器中在機器人自動工作時,控制系統從程序存儲器中檢出相應信息,將指令信號傳給驅動機構,使執行機構再現示教的各種動作。示教輸入程序的工業機器人稱為示教再現型工業機器人。具有
發表于 01-19 10:58
辰漢-如何實現服務機器人的運算與控制
存儲模塊中,當遇到類似的計算的時候就可以判別事物,同時通過網絡模塊可以將這類信息傳遞出去分享給更多的機器人。單片機管理著機器人各類基礎的模塊,步進電機控制機器人的運動,各類傳感器讓
發表于 06-09 17:18
六軸工業機器人控制方式
系統的管理、通訊、運動學和動力學計算,并向下級微機發送指令信息;作為下級從機,各關節分別對應一個CPU,進行插補運算和伺服控制處理,實現給定的運動,并向主機反饋信息。根據作業任務要求的不同,機器人的控制方式又可分為點位
發表于 08-09 16:30
機器人、協作機器人和移動機器人,你分的清楚嗎
機器人”的額外指導。圖1很好地展示了一個機器人系統,其具有一般受保護的工作空間和一個協同操作空間。下面的視頻中對此也有介紹。ISO/TS 15066的關鍵主題之一是“功率和力限制”。在這種工作模式下
發表于 10-30 11:33
機器人是什么?
的機器。一些書呆子式的語言可能會把它描述成“一個可重新編程的多功能機械手,旨在通過各種編程的動作移動材料、部件、工具或專門設備,以完成各種任務”。這個定義非常具有表現力。那么制造機器人的要素是什么呢
發表于 03-31 10:31
通過多軸工業機器人來聊聊機器人控制系統以及控制器的實現
,年均增長31%,預計2023年我國工業機器人市場增速將在20%至25%左右,仍會維持較快的增速。 飛凌嵌入式作為一家專注嵌入式核心控制系統研發與制造的高新技術企業,經過多年的研發與積累,產品已廣泛應用
發表于 02-24 17:05
力控機器人的控制框架和性能評估
與環境之間的力和力矩,并將其作為控制輸入進行實時調整。它可以感知和響應外部力的大小和方向,從而能夠適應不同的工作環境和任務需求。 力控機器人






 工商網監
工商網監
評論