") 位移、速度和加速度與阻抗參數(shù)之間的關系
位移、速度和加速度與阻抗參數(shù)之間的關系
在運動中,位移、速度和加速度與阻抗(慣性、阻尼、剛度)之間存在一定的關系。阻抗控制是一種控制方法,旨在通過調(diào)節(jié)阻抗參數(shù)來實現(xiàn)所需的運動特性。下面是位移、速度和加速度與阻抗參數(shù)之間的關系:
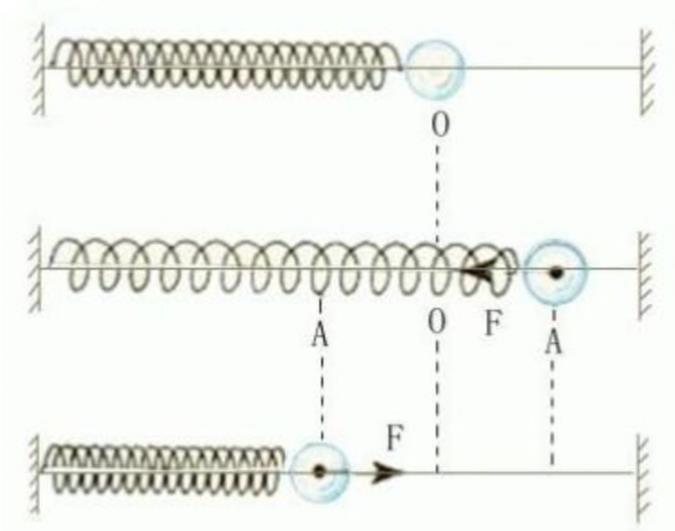
1. 位移與剛度(Stiffness)的關系: 剛度描述了物體對位移變化的抵抗能力。較大的剛度值會使得物體對位移變化更為剛性,即物體更難產(chǎn)生位移。
2. 速度與阻尼(Damping)的關系: 阻尼描述了物體對速度變化的抵抗能力。較大的阻尼值會使得物體對速度變化更為阻尼,即物體的速度響應趨于平穩(wěn)。
3. 加速度與慣性(Inertia)的關系: 慣性描述了物體對加速度變化的抵抗能力。較大的慣性值會使得物體對加速度變化更為慣性,即物體的加速度響應趨于平緩。
% Set simulation time
T = 1000;
dt = 0.001;
% Set desired trajectory
xd = sin(linspace(0, 10, T));
dxd = cos(linspace(0, 10, T));
ddxd = -sin(linspace(0, 10, T));
% Set impedance parameters
Md = 1;
Bd = 10;
Kd = 400;
% Set initial conditions
x0 = 0;
dx0 = 0;
% Initialize variables
x = zeros(1, T);
dx = zeros(1, T);
f = zeros(1, T);
x(1) = x0;
dx(1) = dx0;
% Simulate impedance control
for i=1:T-1
% Compute desired end-effector acceleration
ddx_d = Md (f(i) - Bd*(dx(i) - dxd(i)) - Kd*(x(i) - xd(i)));
% Update end-effector velocity and position
dx(i+1) = dx(i) + ddx_d * dt;
x(i+1) = x(i) + dx(i+1) * dt;
end
% Plot results
tiledlayout(2,1);
nexttile;
plot(x);
hold on;
plot(xd);
title('Position');
nexttile;
plot(dx);
hold on;
plot(dxd);
title('Velocity');
仿真結果如下:
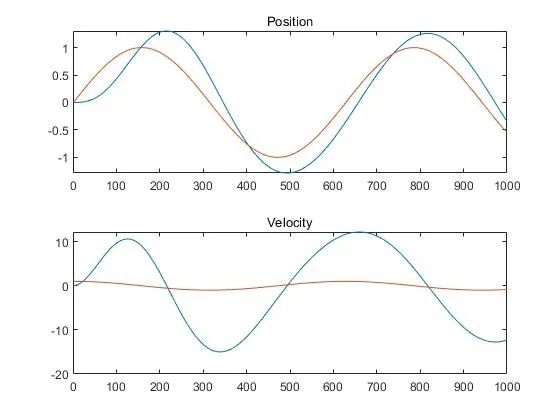
程序設置了仿真時間、期望軌跡和阻抗參數(shù)。然后,使用阻抗控制算法來計算末端執(zhí)行器加速度,并更新末端執(zhí)行器速度和位置。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
210文章
28231瀏覽量
206609 -
運動控制
+關注
關注
4文章
567瀏覽量
32828 -
加速度
+關注
關注
0文章
87瀏覽量
20073
發(fā)布評論請先 登錄
相關推薦
c語言中通過加速度求位移怎么實現(xiàn)
c語言中通過加速度求位移怎么實現(xiàn)在公路安全防護中,由于斜坡上會有石頭等物品滾落,故需要增加防護網(wǎng)。 可是防護網(wǎng)受到撞擊后,會產(chǎn)生位移,那么問題來了:c語言中通過加速度求
發(fā)表于 07-21 17:22
已有頻率與加速度功率譜密度的數(shù)據(jù),怎么得到時域和加速度的關系圖
頻率(fs)是否可以通過>=fmax設置,以及通過采樣頻率可以確定時間間隔。最后通過傅里葉逆變換是否得到的是時域和加速度的關系?程序如下:close allclear,clcfs=6000
發(fā)表于 08-19 17:15
加速度、速度、位移的算法
現(xiàn)在使用ADXL363在做加速度傳感器。目前算法出了問題。加速度準確,可是速度、位移不準確。測試時使用的正弦波。我想請問一下,怎么計算速度和
發(fā)表于 01-16 11:36
加速度計的技術規(guī)格詳解
無效。 注意,極限值由絕對最大加速度規(guī)定,而不是由測量范圍規(guī)定。 4g加速度不會使±3g加速度計失效。加速度計靈敏度:加速度(輸入)變化與輸
發(fā)表于 10-18 10:47
低頻光纖光柵加速度傳感器
線性關系.另外,根據(jù)式(1),光纖光柵的布拉格波長變化與位移xr間的關系為: 可見光纖光柵的布拉格波長變化與激振源的振動加速度成線性關系
發(fā)表于 10-29 15:46
如何測量汽車剎車踏板的位移和加速度
要求測量汽車剎車踏板的位移和加速度,然后用VB上位機顯示,單片機是STC08S2,已有最小系統(tǒng),加速度準備用3軸加速度傳感器測量,位移傳感器
發(fā)表于 07-19 05:56
加速度傳感器的選型
由于傳感器應用十分廣泛,類型多種多樣,在各行各業(yè)都有應用。因此,在這里主要介紹用于振動測試的振動傳感器的選型。按測量振動參量分類可分為三大類:位移傳感器、速度傳感器和加速度傳感器(也稱為加速度
發(fā)表于 08-11 07:49
氣軌上測量滑塊的速度和加速度
氣軌上測量滑塊的速度和加速度 1.掌握氣墊導軌上測滑塊的速度和加速度的一種方法。2.學習使用氣墊導軌和數(shù)字毫秒計。 如圖10-1所示,物體由靜止出發(fā)沿斜面作下滑運動
發(fā)表于 06-09 09:19
?0次下載
基于單片機的發(fā)動機振動速度、位移和加速度測量方法
本文介紹了一種基于單片機的發(fā)動機振動速度、位移和加速度測量方法。該方法首先對發(fā)動機的振動傳感器信號進行高、低通濾波,然后通過模擬開關將其轉化為電壓信號,再
發(fā)表于 08-10 08:14
?79次下載
如何選擇合適的加速度傳感器
這個是最先需要考慮的。這個取決于你系統(tǒng)中和加速度傳感器之間的接口。一般模擬輸出的電壓和加速度是成比例的,比如2.5V對應0g的加速度,2.6V對應于0.5g的
發(fā)表于 01-17 16:44
?1811次閱讀
傳感器專題——低頻加速度傳感器的技術原理及特點
低頻加速度傳感器的技術原理及特點 振動量值的物理參數(shù)常用位移、速度和加速度來表示。 由于在通常的頻率范圍內(nèi)振動
發(fā)表于 03-14 09:31
?2735次閱讀
振動加速度傳感器是什么 振動加速度傳感器的工作原理及作用
振動傳感器有振動位移、振動速度和振動加速度傳感器。今天Ameya360電子元器件采購網(wǎng)將為大家進行介紹。簡單地說,振動位移傳感器(常用電渦流傳感器)根據(jù)振動
怎么檢驗7104A-0050加速度傳感器基本性能
7104A-0050加速度傳感器的測量變量是振幅、速度和加速度三個基本特征量。 因此,測試振動傳感器的目的和要求是建立振幅、速度和加速度的大






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論