 速度模式下外環力矩控制步驟
速度模式下外環力矩控制步驟
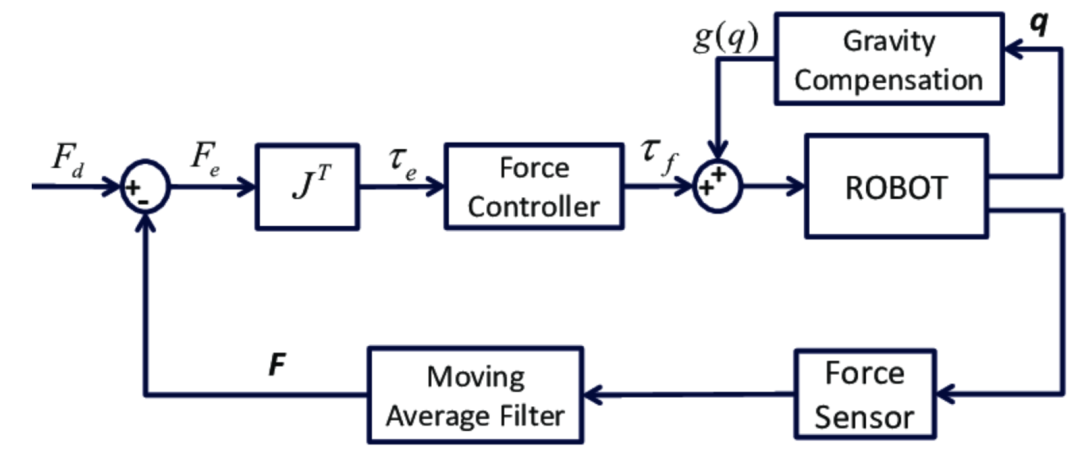
在機器人速度模式下的外環力矩控制中,通常使用速度環和力矩環兩個控制環路來實現。速度環控制機器人的關節速度,而力矩環控制機器人輸出的力矩。
以下是實現速度模式下的外環力矩控制的一般步驟:
- 設定期望速度:根據任務需求或控制要求,設定期望的關節速度。
2.速度控制器設計:設計一個速度控制器,該控制器接收期望速度和實際速度之間的誤差作為輸入,并產生相應的控制信號。常用的速度控制器包括比例-積分(PI)控制器或者更復雜的控制器結構。
- 控制信號轉換:將速度控制器輸出的控制信號轉換為電機驅動器能夠理解的形式。這通常涉及到信號放大、濾波和適配等步驟。
4.控制信號輸入電機驅動器:將轉換后的控制信號輸入到電機驅動器中,以驅動電機并控制關節速度。
- 力矩測量與反饋:使用力矩傳感器來測量機器人輸出的力矩,并將實際力矩信息反饋給控制系統。
- 力矩控制器設計:設計一個力矩控制器,該控制器接收期望力矩和實際力矩之間的誤差作為輸入,并產生相應的控制信號。
- 控制信號轉換:將力矩控制器輸出的控制信號轉換為電機驅動器能夠理解的形式。
- 控制信號輸入電機驅動器:將轉換后的控制信號輸入到電機驅動器中,以調節機器人輸出的力矩。
通過以上步驟,實現了速度模式下的外環力矩控制。速度控制器控制關節速度,力矩控制器控制輸出力矩,兩者結合實現了期望的力矩控制。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
驅動器
+關注
關注
51文章
7997瀏覽量
144996 -
機器人
+關注
關注
210文章
27833瀏覽量
204561 -
控制
+關注
關注
4文章
1005瀏覽量
122506
發布評論請先 登錄
相關推薦
Power PMAC中EtherCAT通信的驅動器下循環力矩模式(CST)的使用
本文主要說明Power PMAC中EtherCAT通信的驅動器下循環力矩模式(CST)的使用,主要通過操作PDO實現,對于循環速度模式(CS
發表于 09-15 08:31
孤島模式下的VSG控制SIMULINK模型搭建方式
寫在最前面 那些看似平淡日復一日的努力,終將使得夢想之花盛開,乘著年輕,闖出自己的精彩。希望各位都能實現理想,與君共勉~ 本期介紹孤島模式下的VSG控制SIMUlink模型搭建方式VSG控制
發表于 03-07 10:29
?2次下載

力矩電機怎么控制轉速和力矩_力矩電機和伺服電機區別
控制力矩電機的轉速和力矩通常需要使用一些控制方法,下面介紹幾種常見的控制方法:
變頻控制:使用變頻器對電機進行
發表于 03-10 14:31
?6859次閱讀
松下伺服速度控制模式怎么設置
松下伺服電機是一種高性能、高精度的電機,廣泛應用于自動化設備、機器人、數控機床等領域。為了實現對伺服電機的精確控制,需要對速度控制模式進行設置。本文將詳細介紹松下伺服





 工商網監
工商網監
評論