 視覺SLAM開源算法ORB-SLAM3原理與代碼解析
視覺SLAM開源算法ORB-SLAM3原理與代碼解析
ORB-SLAM最早的版本在2014年的RSS上發布,在2016年作者又發布了ORB-SLAM2,接著在2020年發布了ORB-SLAM 3。ORB-SLAM1只能針對單目相機數據進行處理;ORB-SLAM 2 增加了對于雙目和RGB-D相機的處理,在回環檢測模塊增加了Full Global BA的處理;ORB-SLAM 3則增加了對于IMU融合的支持,兼容魚眼相機模型,并且增加了Altas多地圖的支持;同時,回環檢測為了支持多地圖的模式,提供了一種叫Welding BA的優化方式。ORB -SLAM的作者將上述提到的各版本項目都開源了,為學術研究還是工程落地都提供了很好的參考。
01
基礎概念
首先來介紹一下ORB SLAM中涉及的一些基礎概念。
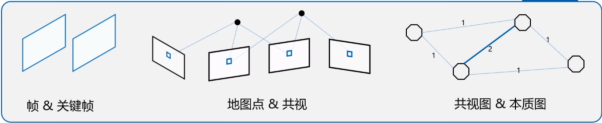
幀&關鍵幀:視覺SLAM都是對一個圖像序列進行處理,每一張圖像被稱為幀,而關鍵幀則是通過一定篩選機制得到的、具有一定代表性的圖像幀。
地圖點/路標點:將圖像上被觀察到的特征點通過三角化等方式進行深度恢復,我們就可以得到其對應的在三維空間的位置,同時包含幀的觀測信息,這種點就被稱為地圖點或路標點。
共視:當一個地圖點被多幀觀察到時,我們就可以稱這幾幀有基于該地圖點的共視關系。
共視圖&本質圖:我們可以把共視關系作用邊表示,關鍵幀用節點表示,就可以建立共視圖,而本質圖在共視圖基礎上只保留具有較強共視關系的邊。
Altas(地圖集):ORB-SLAM 3提供了多地圖的存儲和拼接功能,在跟蹤丟失后可以嘗試將現有地圖和歷史地圖進行匹配、融合,并更新當前的活躍地圖(Active Map)。
數據關聯:在語義SLAM中,第k幀檢測到物體Obj1、Obj2,第k+1幀檢測到物體Obj3、Obj4,確定Obj1和Obj3、Obj4中的哪一個是對真實世界中同一個物體的多次觀測,這是數據關聯的一個直觀例子。在間接法(特征法)SLAM中,表現為不同幀中的特征,哪些是對應于同一個空間路標點/地圖點的。在ORB3中考慮到的數據關聯包括短期內滑動窗口中關鍵幀觀測到的路標點和圖像特征的數據關聯;中期的數據關聯是指圖像特征與局部地圖點的關聯;長期的數據關聯包括利用場景識別技術和詞袋模型,在回環檢測、重定位等過程中的數據關聯;而多地圖的數據關聯還可以實現地圖之間地圖點的匹配和融合。
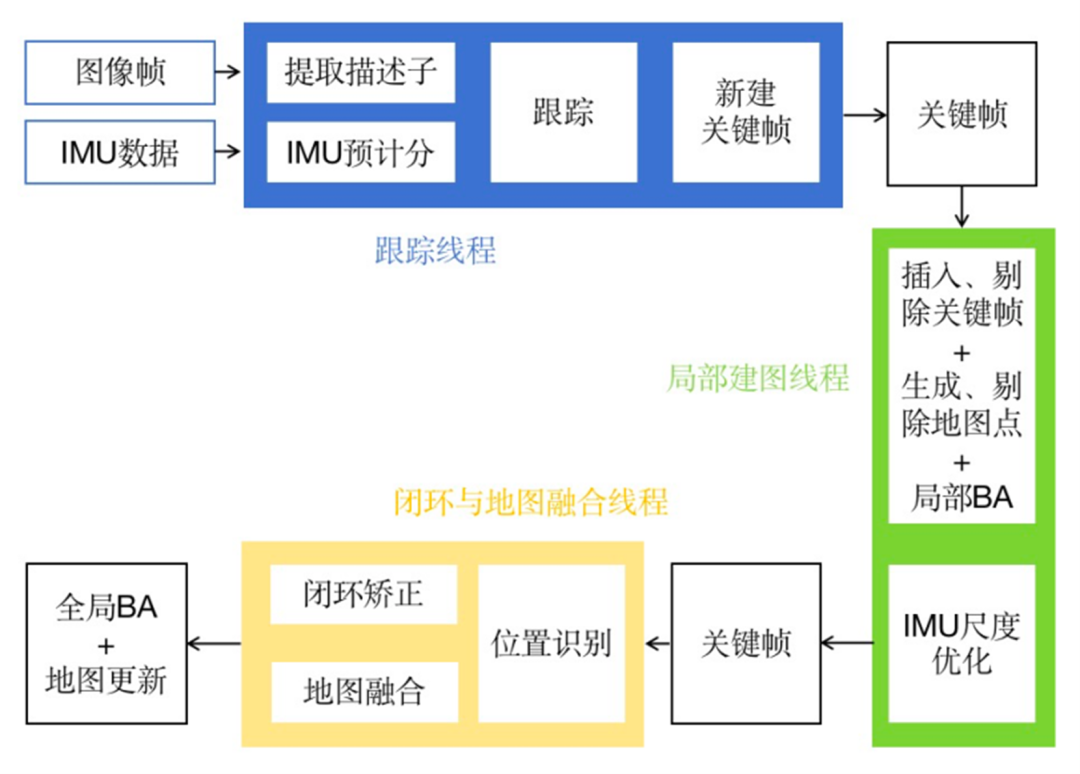
ORB-SLAM 3的基本流程和此前的ORB版本沒有顯著的改變,只是也增加了部分新特性。基于詞袋模型的關鍵幀數據和之前差不多,每一個關鍵幀均會被存入數據庫用于回環檢測。地圖結構上進行了改進,ORB-SLAM3使用Altas地圖集的結構,地圖中包含一個Active Map和若干個Non-active Map,每個Map均包括地圖點,關鍵幀,共視圖,Spanning Tree等信息。跟蹤線程添加了IMU的積分,并且和以前一樣進行關鍵幀的判斷和構造;在LocalMapping線程中中執行IMU的初始化,以及和之前相同的冗余關鍵幀和地圖點剔除、新地圖點的創建等工作;在回環檢測部分主要添加了多地圖的融合。
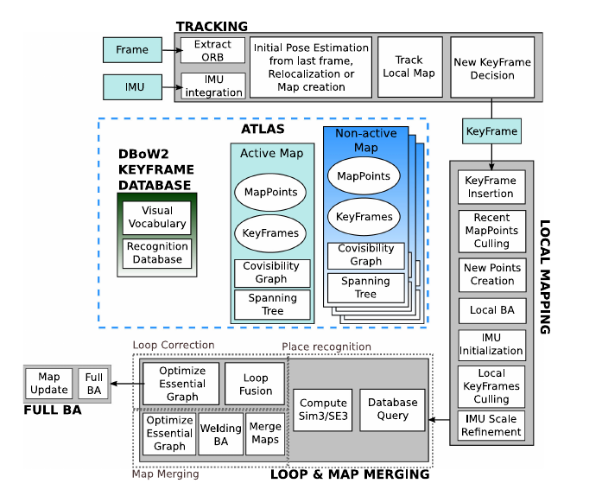
ORB-SLAM 3框架
總結一下,ORB-SLAM3的貢獻包括:
1、提供了一個單雙目VI-SLAM的系統;
2、改善召回率的場景識別技術;
3、多地圖機制;
4、抽象的相機表示。
02
抽象相機模型介紹
為什么ORB-SLAM3需要一個抽象的相機模型呢?
相比于傳統相機,魚眼相機超過180度的廣視角可以獲取更多的信息,但是因為它不符合針孔模型數學建模的假設,導致uniform reprojection error的假設失效;如果對于圖像直接進行裁剪,將會導致外圍圖像丟失,反而喪失了魚眼相機大視角的優勢。在ORB-SLAM3中,相機成像模型提供投影、反投影和相關的雅克比計算等函數,并且將此前系統中的EPNP更換為MAP-PNP, 從而實現了相機成像模型與SLAM部分的解耦,還可以擴展,能將相同的SLAM pipeline用于大部分類型的相機。
此外,針對雙目相機模型,ORB-SLAM3也提供了一定的改善。ORB-SLAM2假設我們針對雙目相機預先進行了極線矯正,但是很多時候由于無法保證左右目相機光軸的絕對平行,極線矯正的效果也往往不好;而有些時候,我們需要使用兩個參數不同的相機進行觀測,而ORB-SLAM2無法兼容這類雙目相機,如類似RGB-D相機中焦距、分辨率相差巨大的彩色相機+近紅外相機,如果將彩色圖像和近紅外圖像組成雙目圖像,ORB-SLAM2無法綜合利用這對圖像估計相機位姿。在ORB-SLAM3中將左右兩目相機視作為具有固定位姿變換的兩臺單目相機使用,并且也不再限制兩臺相機必須具有足夠面積的、重疊的共視區域,解決了這個問題。
03
VISLAM實現和IMU初始化
ORB-SLAM3中VI-SLAM在ORB-SLAM-VI上進行了改進,包括:提供快速,準確的IMU初始化;支持單雙目VI-SLAM;支持針孔/魚眼相機模型。在視覺和IMU融合方面,ORB-SLAM3在位姿求解時所建立優化問題的殘差項,包括所有關鍵幀和上一幀IMU估計的殘差項,以及所有路標點觀測的視覺誤差項。其中針對視覺路標點的觀測,為了避免錯誤匹配造成的極端值的影響,嵌套了魯棒核函數。
IMU初始化的目的是為了得到Body系速度、重力方向和IMU偏置。ORB-SLAM3中初始化流程的設計建立在作者的幾點思考上:
1、ORB-SLAM純單目已經可以初始化得到精確的地圖,尺度信息可以通過IMU得到;雙目圖像輸入下則尺度客觀,可以不考慮尺度信息的問題;
2、如果將尺度單獨作為優化變量進行表示和優化,效果比在BA中的隱式表達收斂更快;
3、IMU初始化過程中必須考慮傳感器的不確定性,否則會產生難以預測的巨大誤差。
接下來的討論IMU初始化問題時,均指單目輸入時的初始化。ORB3中IMU初始化的步驟包含三步,第一步是純視覺最大后驗估計(MAP),第二步是純慣性MAP,第三步是視覺+慣性MAP。針對純視覺MAP,我們提取初始化后2s內10幀圖像進行純視覺BA,從而得到沒有尺度信息的相機位姿和路標點位置。接下來我們進行只有IMU參與的初始化,最終得到的優化結果是:幀位姿、速度和地圖點,并都具有正確的尺度;Body系Z軸將被旋轉到和重力方向一致;IMU的偏置被更新。第三步是視覺IMU聯合后驗估計,ORB-SLAM3只需要2秒就可以完成尺度的初始化,誤差在5%左右,此外,ORB-SLAM3還將進行只包含尺度因子和重力方向的優化,10秒一次,用于避免傳感器運動緩慢時IMU激勵不夠的情況。
ORB-SLAM3中的跟蹤和建圖和ORB-SLAM-VI類似,在短期跟丟后,在滿足一定條件時會嘗試利用IMU積分得到的位姿信息進行重定位;當丟失持續一定時間后,將會重新初始化,創建新的Active map。
04
改進的回環檢測與多地圖融合
這一部分的內容很大程度上和ORB-SLAM2是相同的,我們首先來回顧一下基本概念。
準確率(PrecisionRate):檢測到的回環中正確的比率。
召回率(RecallRate):檢測到的回環占總真實回環數的比率。
在ORB-SLAM1/2中,僅通過DBoW詞袋數據庫就可實現50%~80%的準確率和召回率。在回環時,通過增加幾何一致性和時間一致性檢驗,犧牲召回率來增加準確率。ORB-SLAM3改進了回環檢測的速度,提高了召回率,并且增加了多地圖的部分。
尋找閉環幀的過程可以分為六步:
1.針對每一個新關鍵幀,在數據庫中查詢到三個最相似的關鍵幀;
2.嘗試對新關鍵幀及其共視關鍵幀,和候選關鍵幀及其共視關鍵幀進行數據關聯;
3.利用匹配的特征點和地圖點求解位姿轉換;
4.利用位姿變換的初始估計,進行點云重投影尋找新的匹配,并且進行位姿的優化求精;
5.對時間一致性的檢驗,此前的步驟相對復雜,在ORB-SLAM3中局部地圖里面已有關鍵幀的共視信息進行判斷;
6.利用重力方向對于回環結果進行檢查。
回環檢測后是進行回環還是地圖合并,取決于當前關鍵幀檢測到的回環關鍵幀是在當前的active map還是在其他map。當對non-active map和active map進行融合時,共視圖和本質圖同步更新,active map中的信息被追加到歷史地圖中,匹配到的non-active map變成新的map。
05
總結
總體來說,ORB-SLAM3的流程和ORB-SLAM1/2非常相似,對于ORB-SLAM系列熟悉的同學應該很容易上手;相機模型的抽象處理,使得SLAM位姿求解過程和相機成像模型解耦,理論上支持絕大多數成像模型的相機;通過對于IMU的支持,ORB-SLAM系列加入了VI-SLAM的大家庭,也表明多傳感器融合的SLAM是目前一大發展趨勢;多地圖的機制有利于跟丟后保留盡可能多的信息用于后續補救,也為后續實現多機器協同的SLAM提供了工作基礎。
-
算法
+關注
關注
23文章
4601瀏覽量
92673 -
圖像
+關注
關注
2文章
1083瀏覽量
40418 -
SLAM
+關注
關注
23文章
419瀏覽量
31789
原文標題:干貨丨視覺SLAM開源算法ORB-SLAM3 原理與代碼解析
文章出處:【微信號:gh_c87a2bc99401,微信公眾號:INDEMIND】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問用樹莓派運行ORB-SLAM2算法可行嗎?
激光SLAM與視覺SLAM有什么區別?
基于視覺的slam自動駕駛
單目視覺SLAM仿真系統的設計與實現
機器人SLAM實現
ORB-SLAM3與ORB-SLAM2相比有哪些優勢呢?
OV2SLAM(高速視覺slam)簡析
ORB-SLAM3整體流程詳解

視覺SLAM開源方案匯總 視覺SLAM設備選型

視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀

基于英特爾開發套件使用ORB-SLAM3實現無人機實時定位
工程實踐中VINS與ORB-SLAM的優劣分析






 工商網監
工商網監
評論