 CAN總線和電平邏輯介紹
CAN總線和電平邏輯介紹
CAN總線
CAN是控制器局域網絡的簡稱,是一種能夠實現分布式實時控制的串行通信網絡。CAN總線的功能復雜且智能。
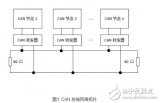
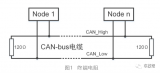
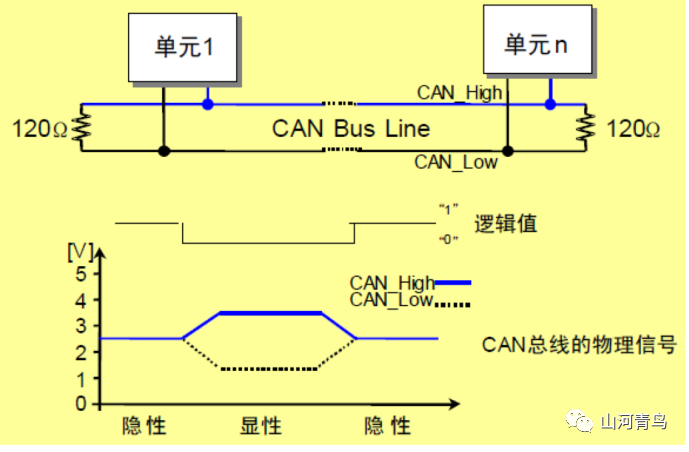
CAN總線網絡主要掛在CAN_H和CAN_L,各個節點通過這兩條線實現信號的串行差分傳輸,為了避免信號的反射和干擾,還需要在CAN_H和CAN_L之間接上120歐姆的終端電阻。
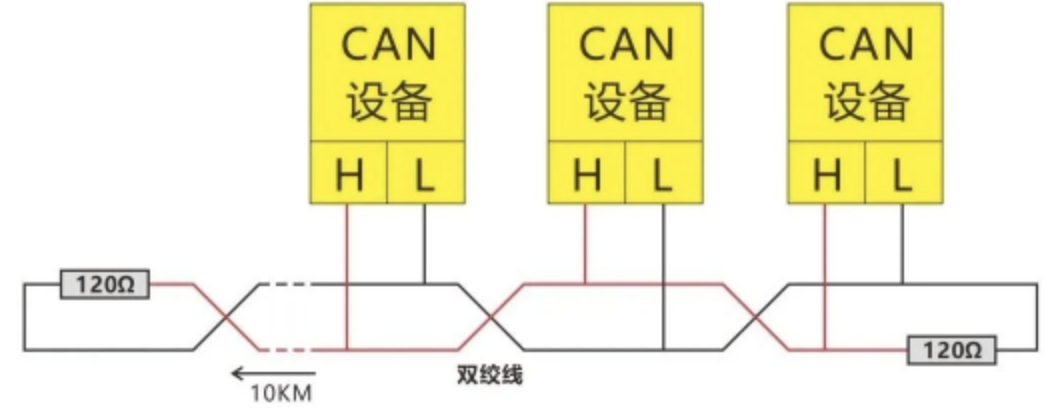
每一個設備既可做主設備也可做從設備。CAN總線的通信距離可達10千米(速率低于5Kbps),速度可達1Mbps(通信距離小于40M)。
CAN電平邏輯
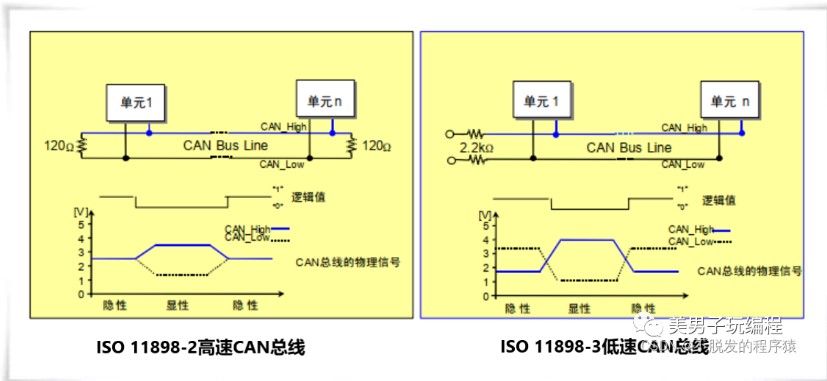
CAN總線采用”線與”的規則進行總線沖裁,1&0為0,所以稱0為顯性,1為隱性。
從電位上看,因為規定高電位為0,低電位為1,同時發出信號時實際呈現為高電位,從現象上看就像0覆蓋了1,所以稱0為顯性,1為隱性。

USB通信串行總線
USB接口最少有四根線,其中有兩根是數據線,而所有的USB數據傳輸都是通過這兩根線完成。它的通信遠比串口復雜的多。
兩根數據線采用差分傳輸,即需要兩根數據線配合才能傳輸一個bit,因此是半雙工通信,同一時間只能發送或者接收。
USB 規定,如果電壓電平不變,代表邏輯1;如果電壓電平變化,則代表邏輯0。

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
112文章
15885瀏覽量
175370 -
CAN總線
+關注
關注
145文章
1898瀏覽量
130336 -
數據線
+關注
關注
8文章
277瀏覽量
37462
發布評論請先 登錄
相關推薦

邏輯電平詳細介紹
邏輯電平詳細介紹邏輯電平有:TTL、CMOS、LVTTL、LVCMOS、ECL、PECL、LVDS、GTL、BTL、ETL、GTLP;RS2
發表于 04-12 12:03
?1.1w次閱讀
CAN總線是什么?CAN總線數據鏈路層又是什么?
CAN 總線的物理連接只需要兩根線,常稱為 CAN_H 和 CAN_L,通過差分信號進行數據的傳輸。CAN
發表于 07-11 16:31
?1.3w次閱讀

CAN總線為什么要加終端電阻,不加會有說明影響
眾所周知,CAN總線的傳輸方式是差分傳輸方式,而總線電平的判斷,就是CAN收發器根據CANH和CANL線纜之間的差分電壓(CANH-CANL
CAN SIC收發器助力復雜CAN網絡高效可靠通信(2)
(RecessiveVoltage),其中顯性電平為邏輯0,隱性電平為邏輯1,如下圖所示。CAN總線電壓






 工商網監
工商網監
評論