 低壓柵極驅動器的結構組成和工作過程
低壓柵極驅動器的結構組成和工作過程
引言:對于中壓或高壓的電源系統,對MOS組的要求特別高,DrMOS已經不能滿足設計參數要求,此時將DrMOS再次分拆開來,將驅動部分獨立成為柵極驅動器。柵極驅動器的強度和抗擾度極佳,非常適用于電機驅動、家用電器、SMPS、電池供電應用和大功率照明。
1.結構組成
在SMPS中,如圖8-1所示,(Low Voltage Gate Drivers)低壓柵極驅動器 (半橋柵極驅動器)即是2部分。而在電機驅動中,兩個半橋柵極驅動器就可以組成一個H橋驅動器,控制電機的轉速和方向,在AC-DC/DC-AC中,還充當整流器和逆變器,例如無線充電鏈路。每一個功率器件都需要一個驅動器(驅動芯片)
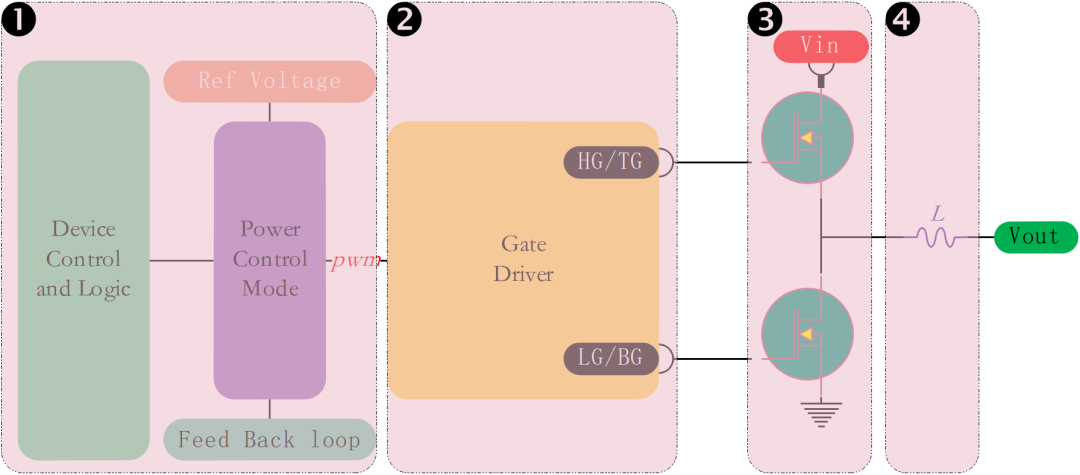
圖8-1:DC-DC結構層級
圖8-1中是以PWM三態模式驅動,還有另外一種兩態模式驅動,本節先介紹PWM模式,下節介紹HL兩態模式。
2.PWM三態模式驅動
驅動結構
圖8-2是一個和數字電源控制器搭配使用的半橋柵極驅動器IC內部結構圖,其中VCC是獨立供電引腳,BOOT和PHASE用于自舉設置(BST),PWM來自于數字電源控制器的PWM輸入,輸入信號PWM參考SGND引腳,TG/BG(UG/LG)狀態由該引腳處的電壓決定。驅動器內部實現了一個嵌入式電阻器網絡,如果該引腳是浮動的,內部電阻分壓器會觸發高Z模式,在該模式下BG和TG都關閉,Layout時該引腳上的寄生電容應最小化。
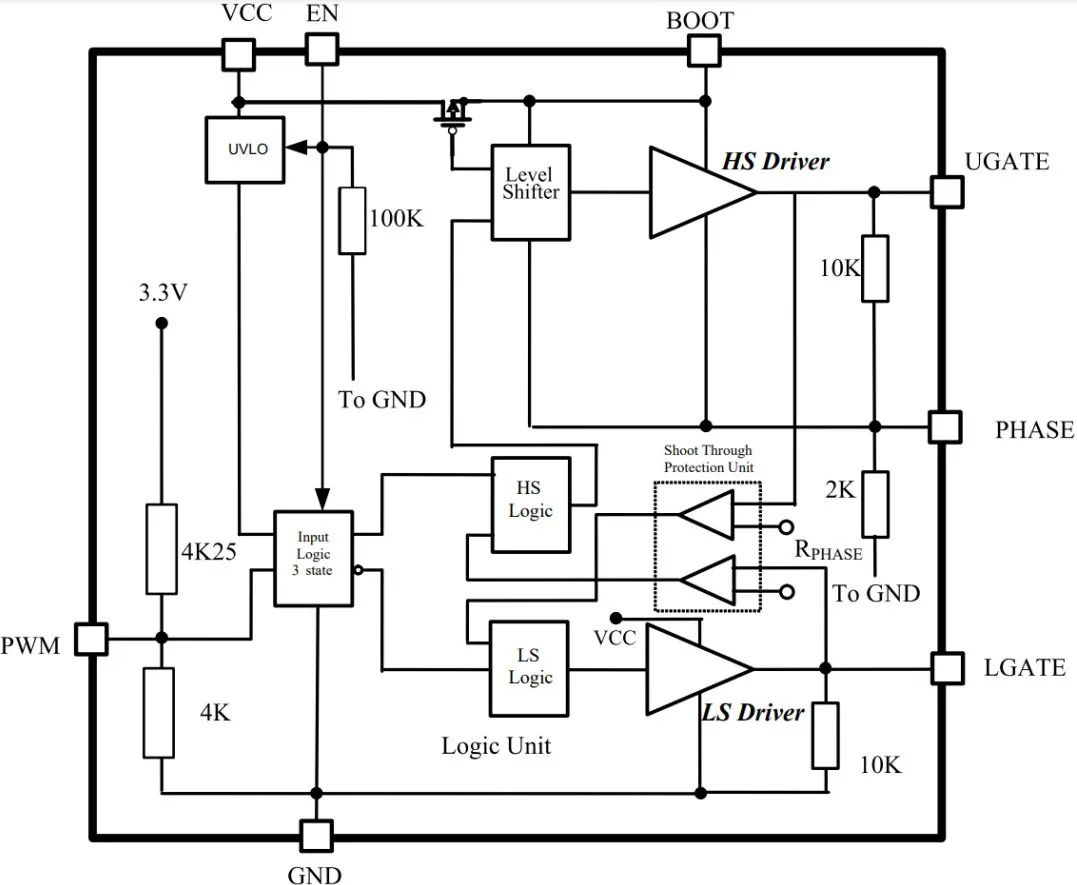
圖8-2:典型的半橋驅動IC內部結構
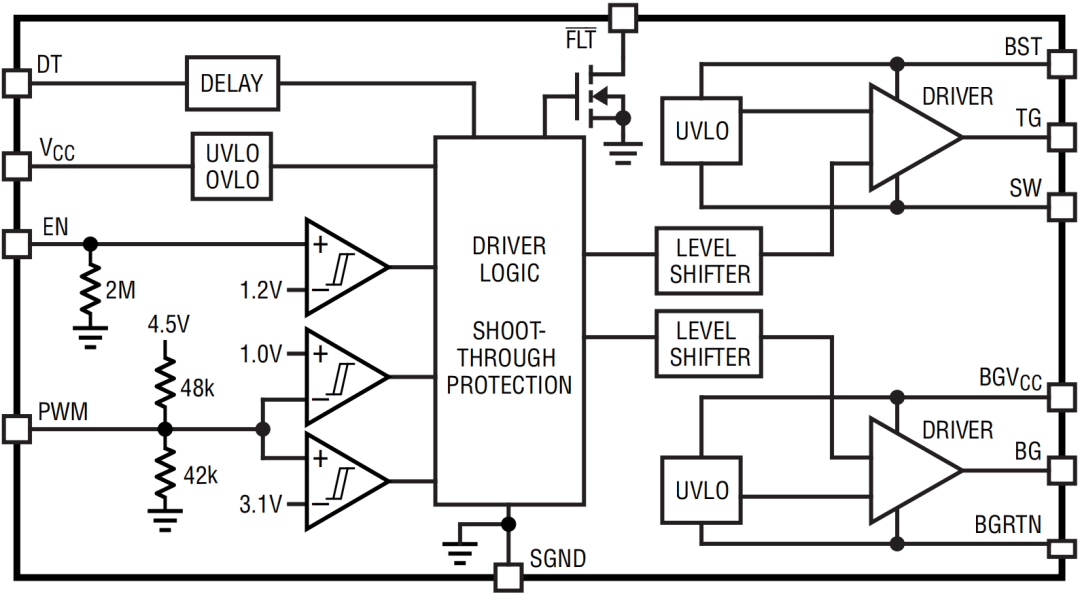
圖8-3:典型的半橋驅動IC內部結構-2
柵極驅動器接收以地為基準的低電壓數字PWM信號,以驅動半橋配置中的兩個N溝道功率MOSFET。低側MOSFET的柵極被驅動為高或低,在BGVCC和BGRTN之間擺動,這取決于PWM引腳的狀態。類似地,高側MOSFET的柵極與低側MOSFET互補地被驅動,在BST和SW之間擺動。低側驅動器和高側驅動器都是浮柵驅動器,獨特的雙浮動結構使柵極驅動器輸出穩健,對地噪聲不太敏感,對稱設計允許半橋輸出是輸入邏輯的反相或非反相。
而同一個PWM波可以同時驅動多個驅動器,如圖8-4所示:
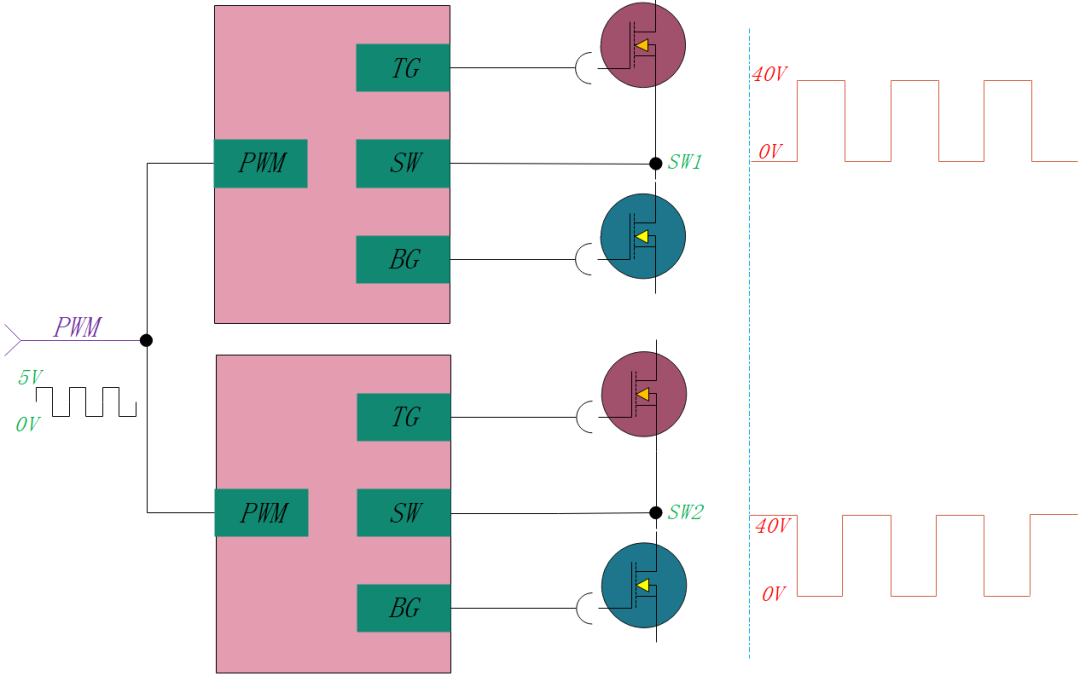
圖8-4:多驅動器模式
驅動邏輯
對于具有固定轉換閾值的三態PWM輸入,驅動器的轉換閾值和三種輸入狀態之間的關系如圖8-5所示。當PWM上的電壓大于閾值VIH(TG)時,TG被上拉到BST,使高側MOSFET導通,該MOSFET將保持導通,直到PWM降至VIL(TG)以下。類似地,當PWM小于VIH(BG)時,BG被上拉到BGVCC,使低側MOSFET導通,BG將保持高電平,直到PWM增加到閾值VIL(BG)以上。
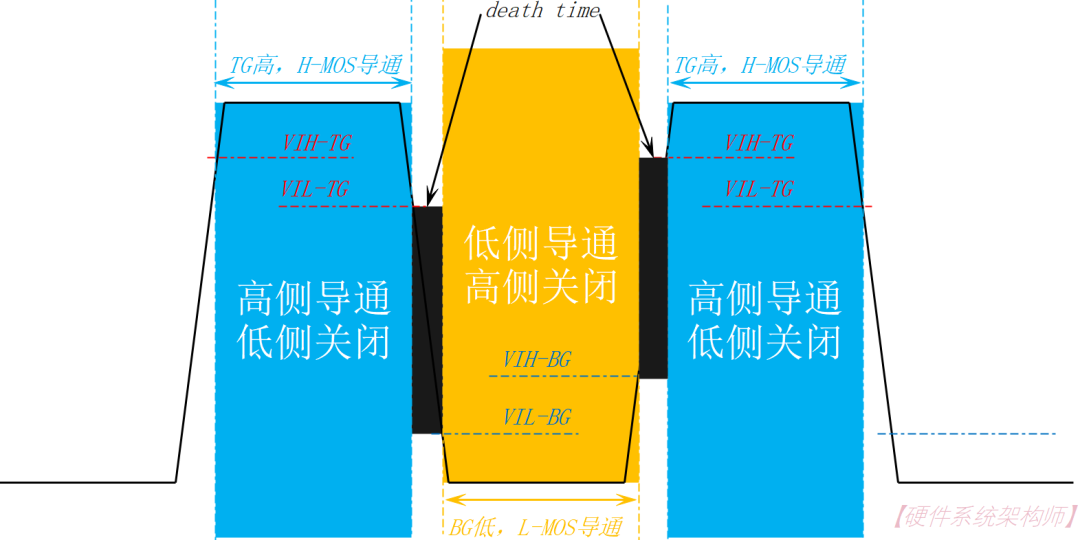
圖8-5:三態及其轉換閾值
驅動器還能夠將兩個外部MOSFET驅動到斷開狀態,當PWM信號電平進入關閉窗口或三態(通常在1.2V和2V之間)時,在關閉保持時間到期后,兩個MOSFET都會關閉。當控制器想要減少活動相(多相架構)的數量以降低功耗時,此功能非常有用。原則上,三態也可以用于在重負載和輕負載轉換期間提高性能。
圖8-6是驅動器的時序圖,其中自適應交叉導通保護基于MOSFET在關斷期間的柵極到源極電壓,當PWM信號變低時,高側MOSFET將開始關斷,一旦高側MOSFET的VGS放電到1V以下,低側MOSFET就會開始導通。當PWM信號變高時,低側MOSFET將開始關斷,一旦低側MOSFET的VGS在1V以下放電,高側MOSFET就會開始導通。為了避免高側MOSFET和低側MOSFET之間的交叉導通,驅動器內部采用了自適應反擊穿控制方案,這種自適應方案允許將各種不同的功率MOSFET用于不同類型的功率轉換,但是為了最大限度地提高整體解決方案的效率,死區時間保持得盡可能短。
對應的VIH和VIL電平之間的滯后消除了由于開關轉換期間的噪聲而引起的錯誤觸發,但是應注意防止噪聲耦合到PWM引腳,特別是在高頻、高電壓應用中。
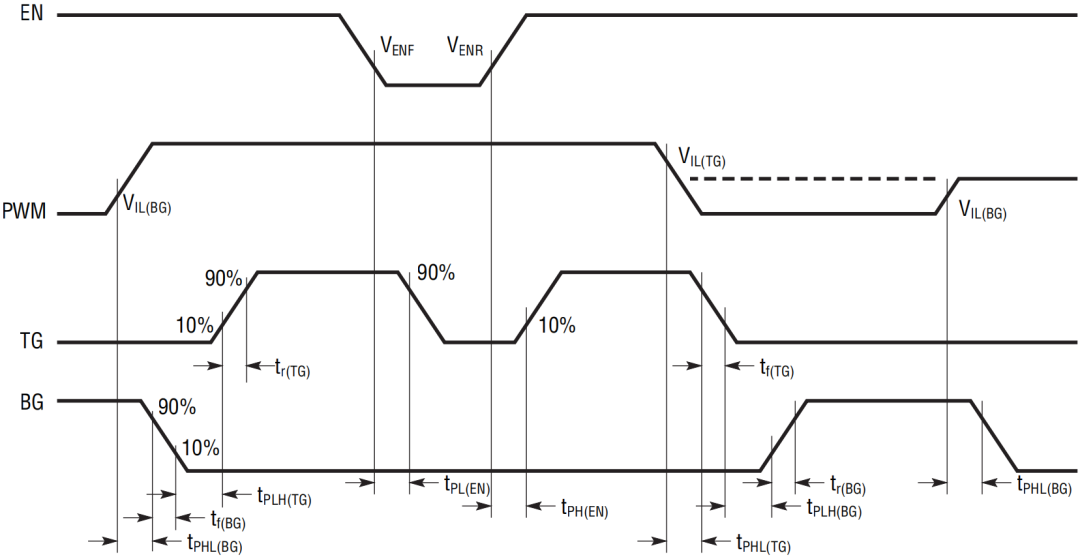
圖8-6:三態柵極驅動器時序圖
驅動能力
由于功率MOSFET通常占轉換器中功率損耗的大部分,因此具備快速導通和關斷特性的功率MOSFET非常重要,從而最大限度地減少轉換時間和功率損耗。如圖8-7所示,驅動器的典型1.5Ω上拉電阻和0.8Ω下拉電阻相當于10V驅動器電源下的3A峰值上拉電流和6A峰值下拉電流。BG和TG都可以驅動MOSFET的快速導通轉變,具有以18ns上升時間驅動3.3nF負載的能力,所以一定要關注所選MOS的寄生電容和Layout電容。
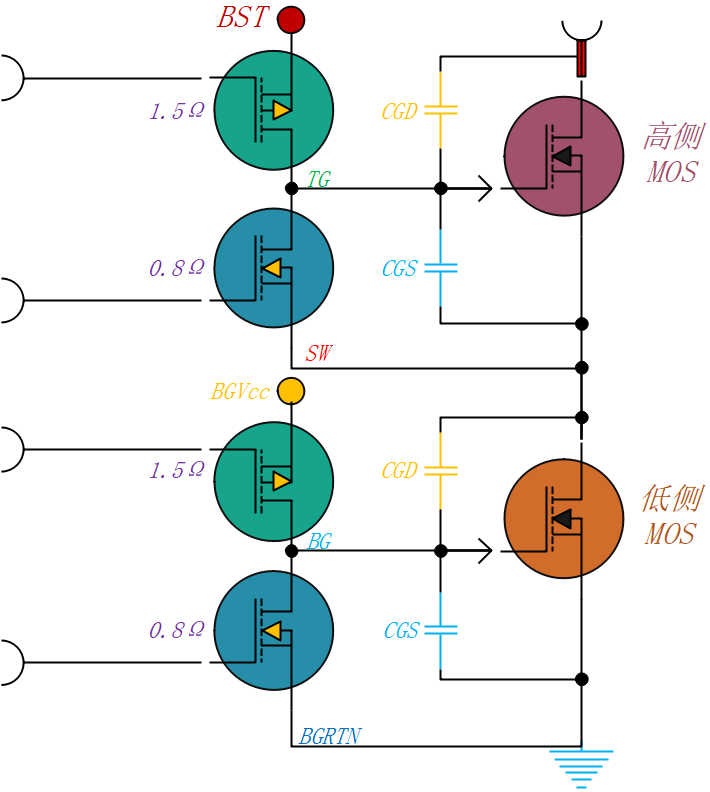
圖8-7:半橋配置中的簡化輸出級
3.工作過程 *
當VCC引腳電壓超過VCC上升電壓閾值(VUVLO_R)時,驅動器開始根據PWM狀態進行操作。在VCC引腳電壓達到VCC上升閾值之前,兩個MOSFET都保持在斷開狀態。對于VCC,建議其上升沿的斜率高于上升UVLO閾值附近的5V/100ms。當PWM信號執行從低狀態到高狀態的轉換(PWM電壓高于2.5V典型值)時,在關斷傳播延遲時間之后,低側MOSFET關斷,接下來在導通傳播延遲時間之后,高側MOSFET導通。一旦接通時間到期,PWM信號從高狀態轉換到到低狀態(PWM電壓低于0.8V典型值),這將在關斷傳播延遲時間之后將高側MOSFET從導通狀態驅動到截止狀態。
4.自舉電容
高側MOSFET通過自舉電路供電,有的內部帶自舉電源,有的驅動器嵌入自舉二極管,因此要完成Boot網絡,只需要在PHASE引腳和BOOT引腳之間添加電容。在許多情況下,驅動器經過優化已具備最佳的開關動作,因此不需要外部電阻(串聯柵極驅動電阻)。根據高側MOSFET柵極電荷來選擇自舉電容,以下公式給出了由于高側MOSFET的充電而引起的自舉電容兩端的電壓降的準確估算:
ΔVBoot是自舉電壓的浮動值,這通常應盡可能低,以避免高側MOSFET的Rdson下降,一般0.1V和0.01V之間的值是可以接受的。
低側MOSFET驅動器通過VCC引腳供電,自舉電容的相同考慮因素和公式可以應用于對VCC引腳進行濾波的電容。部分驅動器還支持將驅動電壓從4.5V調整到8V,這樣的靈活性使設計者能夠以任何所需的方式塑造效率曲線。
5.注意點
驅動器輸出上的強下拉防止了交叉傳導電流,例如在圖8-7所示的半橋配置中,當BG關閉低側功率MOSFET,TG打開高側功率MOSFET時,SW引腳上的電壓可能會非常迅速地上升到VIN,該高頻正瞬態電壓將通過低側功率MOSFET的CGD電容耦合到BG引腳。如果BG引腳沒有被充分壓低,BG引腳上的電壓可能會上升到低側功率MOSFET的閾值電壓以上,從而瞬間使其重新導通,因此高側和低側MOSFET都將導通,這將導致大量的交叉導通電流通過MOSFET從VIN流到地,從而造成相當大的功率損失并且可能損壞MOSFET,因此建議BG和TG引腳的PCB走線盡可能短粗,以最大限度地減少寄生電感。
-
PWM
+關注
關注
114文章
5141瀏覽量
213390 -
smps
+關注
關注
6文章
130瀏覽量
54529 -
驅動芯片
+關注
關注
13文章
1257瀏覽量
54448 -
DC-AC
+關注
關注
3文章
27瀏覽量
17979 -
柵極驅動器
+關注
關注
8文章
729瀏覽量
38957
發布評論請先 登錄
相關推薦
為什么需要柵極驅動器?柵極驅動器及其應用介紹

單片機應用系統的結構與工作過程
柵極驅動器是什么
了解您的柵極驅動器






 工商網監
工商網監
評論