 力控機器人接觸力濾波與估計
力控機器人接觸力濾波與估計
力控機器人本身關節具有力傳感器,可為什么還需要接觸力濾波和估計呢?這是不是有些多余?顯然是不是的,本篇博文總結下力控機器人接觸力濾波與估計的一些原因:
1.環境噪聲和不確定性:在力控機器人與環境進行物理交互時,存在來自環境的噪聲和不確定性,這些因素可能導致力傳感器測量值的不穩定性和波動。接觸力濾波可以幫助去除這些噪聲和不確定性,得到更加準確和可靠的接觸力信息。
2.控制穩定性:力控機器人依賴于實時感知和反饋控制系統,以實現對接觸力的精確控制。如果接觸力信號存在快速變化或噪聲,將導致控制系統的不穩定性和振蕩。通過濾波和估計接觸力,可以平滑力信號,提高控制系統的穩定性和性能。
3.精確的力控操作:某些應用場景中,力控機器人需要實現對接觸力的精確調節和控制,例如裝配、力敏操作等。通過濾波和估計接觸力,可以提供準確的力信息,幫助機器人進行精確的力控操作,使機器人能夠適應不同的環境和任務需求。
安全性和保護:力控機器人在與人類或脆弱物體進行交互時,需要保證接觸力在安全范圍內,并避免對人體或物體造成損害。
4.通過接觸力濾波和估計,可以監測和控制接觸力的大小和變化,確保機器人在安全和可控的范圍內操作。
綜上所述,接觸力濾波和估計對于力控機器人的正常運行、控制穩定性、精確操作和安全性至關重要。可以提供可靠的接觸力信息,幫助機器人感知和調節與環境的物理交互。
有多種方法可用于接觸力濾波和估計,以下是一些常見的方法:
1.低通濾波器:通過設計和應用低通濾波器,可以去除接觸力信號中的高頻噪聲,從而平滑信號并減少不穩定性。常用的低通濾波器包括滑動平均濾波器、指數加權移動平均濾波器等。
2.卡爾曼濾波器:卡爾曼濾波器是一種基于狀態估計的濾波器,可以通過融合傳感器測量和系統動態模型,對接觸力信號進行濾波和估計。
卡爾曼濾波器可以提供更準確的估計結果,并適應信號的動態變化。
3.尺度變換法:該方法通過對接觸力信號進行尺度變換,將其映射到期望范圍內。尺度變換可以根據已知的力傳感器特性進行,使得接觸力估計更加準確和可靠。
4.機器學習方法:機器學習技術如神經網絡、支持向量機等可以應用于接觸力濾波和估計。通過對大量接觸力數據進行訓練和建模,可以建立接觸力模型并實現對未知力信號的估計。
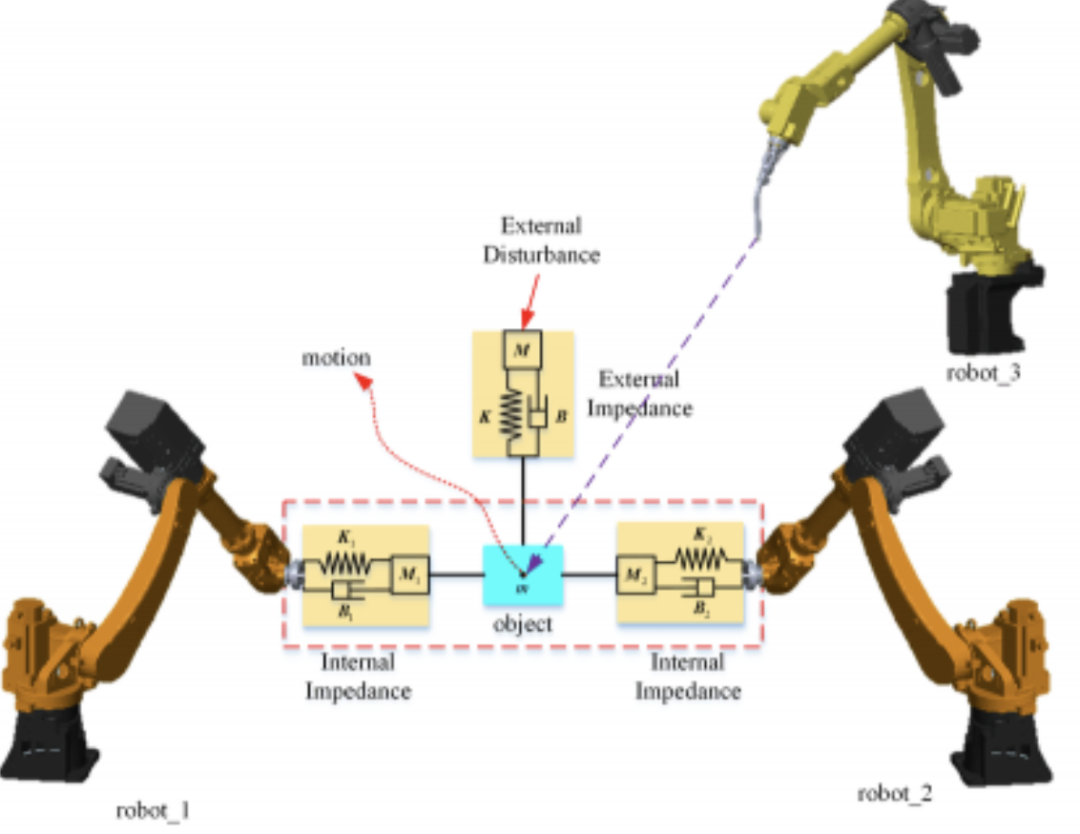
5.物理模型和辨識方法:利用物理模型和系統辨識技術,可以建立機械臂與環境之間接觸力的動態模型,并通過與實際測量值進行比較和校正,實現接觸力的估計和濾波。
這些方法可以單獨或結合使用,具體的選擇取決于應用場景、系統要求和可用的傳感器數據。
在實際應用中,通常需要根據具體情況進行試驗和調整,以獲得最佳的接觸力濾波和估計效果。
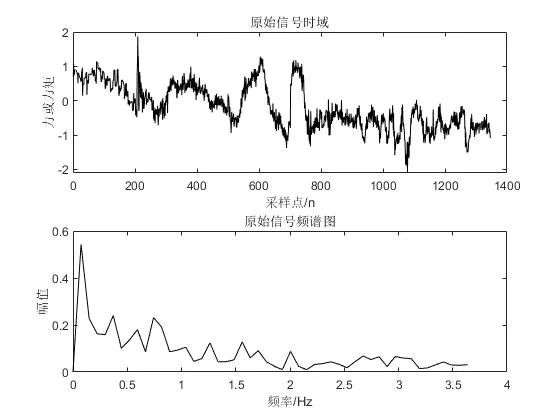
下面舉一些簡單的例子,對接觸力數據進行濾波處理:
function filtered_force = frequency_filter(force, cutoff_frequency, sampling_frequency)
% 計算濾波器參數
normalized_cutoff = cutoff_frequency / (sampling_frequency / 2);
[b, a] = butter(4, normalized_cutoff, 'low'); % 4階低通巴特沃斯濾波器
% 應用濾波器
filtered_force = filtfilt(b, a, force);
end
% 生成模擬的接觸力數據
sampling_frequency = 100; % 采樣頻率(Hz)
duration = 5; % 數據持續時間(秒)
t = 0:1/sampling_frequency:duration;
force = sin(2*pi*2*t) + 0.5*sin(2*pi*10*t) + 0.2*sin(2*pi*30*t); % 模擬接觸力數據
% 應用頻率濾波器
cutoff_frequency = 15; % 截止頻率(Hz)
filtered_force = frequency_filter(force, cutoff_frequency, sampling_frequency);
% 繪制原始數據和濾波后的數據
figure;
subplot(2,1,1);
plot(t, force);
title('原始接觸力數據');
xlabel('時間(秒)');
ylabel('力');
subplot(2,1,2);
plot(t, filtered_force);
title('濾波后的接觸力數據');
xlabel('時間(秒)');
ylabel('力');
-
傳感器
+關注
關注
2548文章
50678瀏覽量
752015 -
機器人
+關注
關注
210文章
28205瀏覽量
206532 -
力控
+關注
關注
0文章
22瀏覽量
7854
發布評論請先 登錄
相關推薦
機器人的眼睛和大腦:智能化光電傳感器
機器人傳感器的類別和應用原理
協作型機器人的應用類型
機器人遙控焊接力覺傳感與控制
軟固結磨粒群接觸力分析
使用三種不同結構的LSTM神經網絡結構對觸覺力進行動態重建
機器人力控的性能指標有哪些
機器人阻抗控制有幾種方法
如何實現對機器人接觸力的數據濾波
力控通常分為幾種類型
機器臂柔順控制初步分析
接觸力對120A250A大電流接線端子有哪些影響






 工商網監
工商網監
評論