 任務狀態機的相關概念
任務狀態機的相關概念
[導讀] 大家好,我是逸珺。
前面一文利用FreeRTOS點燈,算是將FreeRTOS給跑起來了,要用好RTOS,從黑盒角度去理解一下調度器是怎么工作的是很必要的,當然如果想研究其內部實現原理,可以去讀其內部實現代碼,但是個人感覺如果是從用的角度,把內核看成黑盒,跳出來梳理一下概念也很有用。
所以本文不切入內核代碼,僅從用戶視角來學習一下任務狀態機相關的概念,以及相應API的作用。
RTOS核的作用
前面一文分析FreeRTOS框架的時候,曾給出這樣一個理解圖:
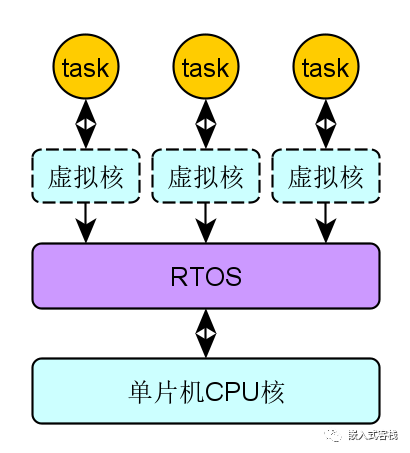
對于單片機而言,一般只有一個核,RTOS的主要作用是將用戶多任務進行管理,在物理CPU核上調度管理。所以為了方便理解,可以將RTOS的調度管理器,看成是將硬件CPU核通過軟件的辦法為每一個應用任務虛擬出一個軟核。這樣就使每個任務看起來都擁有一個CPU核,這樣從時間維度上看起來多任務是并行的,而事實上這種并行是偽并行。
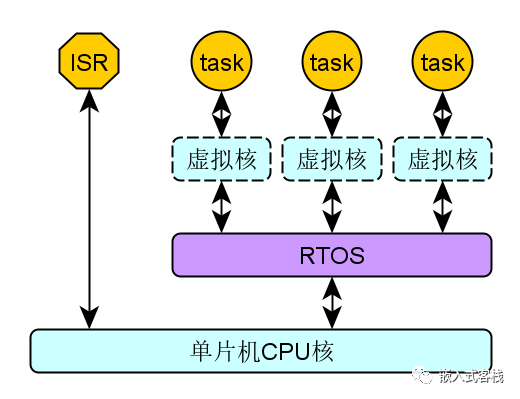
一般單片機只有一個硬件核,那么在任意時刻,則只可能有一個任務在運行。其實這樣理解還不全面,能夠獲取CPU時間的,從應用編程的視角,還有一個主角是不能忽略的,那就是中斷程序。
任務狀態
狀態概念
對于FreeRTOS的狀態概念有必要先好好理解一下,理解了才能正確的使用API進行正確的應用,才知道調用了某一個API究竟會有怎樣的行為表現。
<
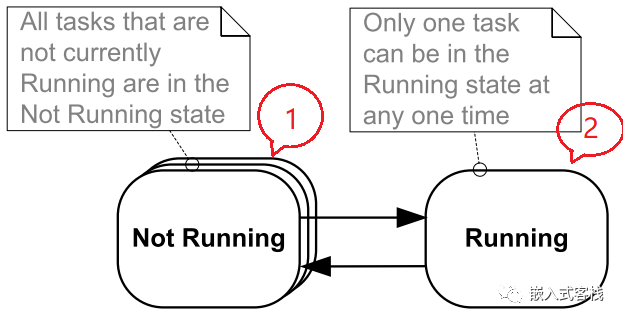
對于單內核的芯片而言,任一任務要么處于運行態,要么處于非運行態。但同一時刻只能有一個任務處于運行態。這也是為什么這個圖中①畫的任務框是多個疊起來的,而②所示的任務只有一個框的原因。那么事實上,對于非運行態其內部又被劃分出了幾個子狀態:
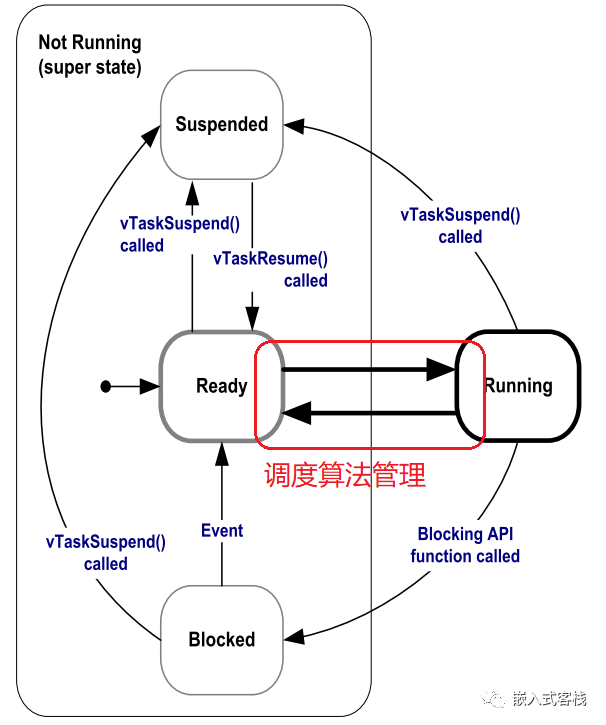
Suspended: 掛起態,什么叫掛起呢?簡單講就是任務進入了掛起態后,調度器就不會對其進行調度了,也就是它不會被調度器裝載到CPU核中運行,任務狀態始終保持在進入掛起態時刻的現場。
就好比看一個修仙劇,內核調度器是一個法術高手,會時間靜止法術,啪一個法術,這個任務就被定住了,不能再動了。但任務還在,只是不動了。直到法術解除。那么這里所謂的現場,就是該任務的TCB任務控制數據結構,將暫停時刻的物理CPU相關寄存器保存了。
Ready: 就緒態,就是指任務可以被調度器裝載進CPU核運行的狀態,但是還沒有被裝載進CPU核。為什么有這樣一個就緒態呢?前面說了,RTOS主要作用就是多任務的調度管理。那么就緒的任務就有可能是多個,也就是說在同一時刻,多個任務有可能都就緒了,至于調度器究竟讓哪一個任務先運行呢,這就是調度器調度算法的職責了,根據其內部的調度算法策略進行調度管理。
FreeRTOS支持的調度算法有:
時間片調度策略:也稱為Round Robin調度算法,Round Robin調度算法不保證同等優先級的任務之間平均分配時間,只保證同等優先級的Ready狀態任務會依次進入Running狀態。
這可能讓人費解,首先時間片Time Slice是指兩個Tick中斷間的時間間隔,每次新的Tick中斷時,調度器會檢查任務隊列中是否有與正在運行的任務優先級相同的就緒態任務,如果有,就將正在運行的任務換出CPU,將新任務換入CPU。所以該機制并不保證相同優先級就緒態任務獲得的CPU時間片相等。
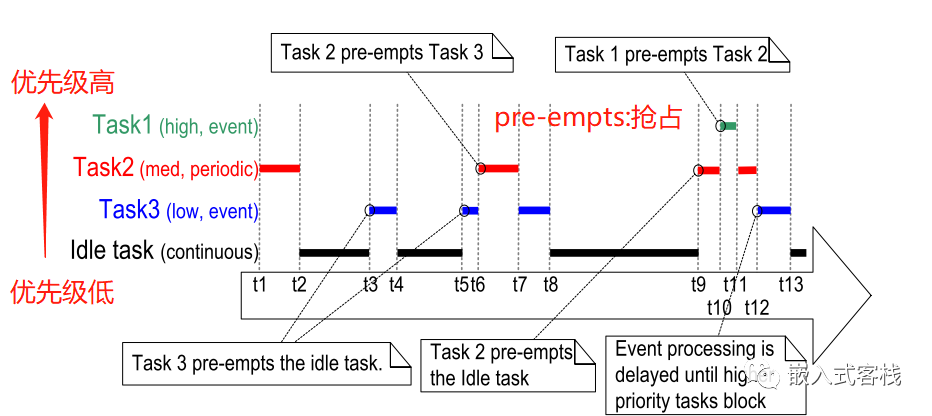
固定優先級搶占式調度:這種調度算法根據任務的優先級選擇任務進行裝載。換句話說,高優先級任務總是在低優先級任務之前獲得CPU。只有當沒有處于就緒狀態的高優先級任務時,低優先級任務才能執行。
更準確地理解:如果優先級高于運行狀態任務的任務進入就緒狀態,搶占式調度算法將立即“搶占”運行狀態的低優先級任務。被搶占意味著低優先級任務馬上被調度器換出運行狀態,并進入就緒狀態,而高優先級任務被轉載進CPU進行運行。需要注意的是,低優先級任務是進入就緒態而非掛起態,當高優先級任務完成運行,進入阻塞態后,原低優先級任務將有機會被調度運行。
Blocked: 阻塞態。所謂阻塞態,可以簡單理解是任務被卡在了哪里,該任務不會繼續往下運行,直到阻塞解除,被轉入就緒態,然后被調度至運行態。需要注意區分的是:阻塞態與暫停態是兩回事,暫停是被移除調度列表,除非被人為恢復進任務調度表。而阻塞態,當阻塞事件解除,會自動進入就緒態,從而有機會被調度器換入CPU進而運行。
阻塞事件基本可以分成兩類:
時間事件:比如vTaskDelay調用,任務將延遲一定的時間,一旦該函數被調用,該任務就被阻塞,直到延遲的時間結束會進入就緒態。
同步事件:比如等待消息隊列、獲取信號量、獲取互斥體等等。
上面說到搶占式調度算法,看下面這個圖就比較好理解了,在圖中所示的時間點,高優先級的任務一旦就緒則會馬上搶占低優先級任務。
狀態切換
前面將狀態概念擼了一遍,狀態機的理解需要從兩個維度進行理解:1.有哪些狀態,每個狀態啥物理含義;2.狀態的切換條件,什么條件會觸發狀態變化。
上面的任務狀態圖描述的比較清楚,這里總結一下這些狀態究竟怎么切換的:
進入掛起態:在任務的任意狀態下,一旦應用程序調用了vTaskSuspend這個API,就會將指定的任務設置掛起態。
voidvTaskSuspend(TaskHandle_tpxTaskToSuspend); voidvTaskSuspendAll(void);
以上兩個任務都可以用于將任務設置成掛起態,vTaskSuspend用于將指定的任務設置為掛起態,pxTaskToSuspend就是指定的任務描述符,而vTaskSuspendAll將所有任務設置成掛起態。
退出掛起態:當任務已經處于掛起態,如應用需要將其恢復,需要調用vTaskResume或者xTaskResumeAll,將某個任務或者全部任務恢復為就緒態。注意是就緒態而非運行態,進入運行態是調度器實現的。
voidvTaskResume(TaskHandle_tpxTaskToResume); BaseType_txTaskResumeAll(void);
要讓任務恢復運行,上面兩個API必須要在非掛起態任務中調用,否則是不可能被恢復的,因為處于掛起態的任務是沒有機會獲得CPU使用權運行的。
對于掛起態的應用場景的思考,比如應用程序中檢測到某個故障了,此時需要處理故障,就可以將某個任務掛起,或者全部掛起,直到故障消除。
進入阻塞態:阻塞的概念是相對于運行而言的,也就是說一個正在運行的任務由于OS API調用會卡住不往下運行,所以狀態圖中是運行態會被阻塞,也就是說該任務本來正在運行,但在這個調用之后就會被調度器換出CPU。
有哪些API會讓一個正處于運行的任務阻塞呢?
1.時間事件API:
voidvTaskDelay(TickType_txTicksToDelay); voidvTaskDelayUntil(TickType_t*pxPreviousWakeTime,TickType_txTimeIncrement);
這兩個API是當任務希望主動出讓CPU時使用,一旦調用該任務就被設置為阻塞態,直到需要等待的時間結束,調度器將相應的任務設置為就緒態。調度器再根據調度算法決定是否被裝載進CPU核運行。
應用例子:比如某個需要固定周期執行的任務,就可以在任務應用代碼執行完后調用這個延遲函數,出讓CPU。讓其他的任務有機會被轉載運行。
vTaskDelayUntil一般會先獲取當前Tick數,然后再延遲到某一個增加量。
2.同步事件API:
uint32_tulTaskNotifyTake(BaseType_txClearCountOnExit,TickType_txTicksToWait); BaseType_txTaskNotifyWait(uint32_tulBitsToClearOnEntry, uint32_tulBitsToClearOnExit, uint32_t*pulNotificationValue, TickType_txTicksToWait); //消息隊列相關 BaseType_txQueueReceive(QueueHandle_txQueue, void*pvBuffer, TickType_txTicksToWait); BaseType_txQueueReceiveFromISR(QueueHandle_txQueue, void*pvBuffer, BaseType_t*pxHigherPriorityTaskWoken); BaseType_txQueuePeek(QueueHandle_txQueue, void*pvBuffer,TickType_t xTicksToWait); BaseType_txQueuePeekFromISR(QueueHandle_txQueue,void*pvBuffer); //信號量相關 BaseType_txSemaphoreTake(SemaphoreHandle_txSemaphore,TickType_txTicksToWait); BaseType_txSemaphoreTakeFromISR(SemaphoreHandle_txSemaphore, signedBaseType_t*pxHigherPriorityTaskWoken); BaseType_txSemaphoreTakeRecursive(SemaphoreHandle_txMutex, TickType_txTicksToWait); //stream相關 size_txStreamBufferReceive(StreamBufferHandle_txStreamBuffer, void*pvRxData, size_txBufferLengthBytes, TickType_txTicksToWait); size_txStreamBufferReceiveFromISR(StreamBufferHandle_txStreamBuffer, void*pvRxData, size_txBufferLengthBytes, BaseType_t*pxHigherPriorityTaskWoken); //Event相關 EventBits_txEventGroupWaitBits(constEventGroupHandle_txEventGroup, constEventBits_tuxBitsToWaitFor, constBaseType_txClearOnExit, constBaseType_txWaitForAllBits, TickType_txTicksToWait); EventBits_txEventGroupSync(EventGroupHandle_txEventGroup, constEventBits_tuxBitsToSet, constEventBits_tuxBitsToWaitFor, TickType_txTicksToWait); //message相關 size_txMessageBufferReceive(MessageBufferHandle_txMessageBuffer, void*pvRxData, size_txBufferLengthBytes, TickType_txTicksToWait); size_txMessageBufferReceiveFromISR(MessageBufferHandle_txMessageBuffer, void*pvRxData, size_txBufferLengthBytes, BaseType_t*pxHigherPriorityTaskWoken);
此類任務主要用于任務間,或者任務與中斷間同步或通訊的目的,在等待某一個消息或者事件的時候,將該任務阻塞而不是裸奔的查詢等待,本質上就是為了提高CPU的利用率的。
需要注意的是,有的API是不能用于等待來自中斷的消息或者事件的,如果需要與中斷程序同步或者通信,需要使用相應的中斷版本API。
總結一下
將FreeRTOS任務相關的狀態梳理一下,其他的RTOS其實也是類似的,只不過實現細節會略有差異,從概念上大體上是相通的。要正確的使用RTOS,清楚正確的理解其任務狀態相關概念是必要的。相關的API并不需要記憶,只需要理解概念就可以了,用的時候查一查就好了。
-
單片機
+關注
關注
6023文章
44376瀏覽量
628393 -
內核
+關注
關注
3文章
1336瀏覽量
40084 -
FreeRTOS
+關注
關注
12文章
483瀏覽量
61726 -
狀態機
+關注
關注
2文章
489瀏覽量
27394
原文標題:使用FreeRTOS要好好理解任務狀態機
文章出處:【微信號:玩轉嵌入式,微信公眾號:玩轉嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Verilog狀態機+設計實例
raw os 之狀態機編程
如何寫好狀態機
兩段式狀態機不可能完成的任務

用狀態機原理進行軟件設計


什么是狀態機?狀態機5要素
狀態模式(狀態機)






 工商網監
工商網監
評論