") 基于SWM190RBT6-50芯片的FOC風(fēng)機(jī)方案
基于SWM190RBT6-50芯片的FOC風(fēng)機(jī)方案
| 類型 | 型號 | 封裝 | 數(shù)量 |
| 電阻 | 10R | 0603*4 | 1 |
| 100R | 0805 | 1 | |
| 1K | 0603*4 | 7 | |
| 1K | 0805 | 3 | |
| 5.1K | 0805 | 13 | |
| 1M | 0805 | 1 | |
| 電容 | 12P | 0805 | 2 |
| 22P | 0805 | 2 | |
| 4.7UF | 1206 | 2 | |
| 16V1000UF | 電解 | 1 | |
| LED | LED綠色 | 0805 | 25 |
| LED紅色 | 0805 | 1 | |
| LED黃色 | 0805 | 1 | |
| 二極管 | 1N4148 | 玻璃管 | 2 |
| 1N5822 | 貼片 | 1 | |
| 晶振 | 32.768K | 2*6 | 1 |
| 8.000MHz | 49SMD | 1 | |
| 芯片 | 1117-3.3 | SOT223 | 1 |
| IR21364S | SOP-28 | 1 | |
| SWM190RBT6-50 | LQFP64 | 1 | |
| 其它 | 5.1K電位器 | 3362P | 2 |
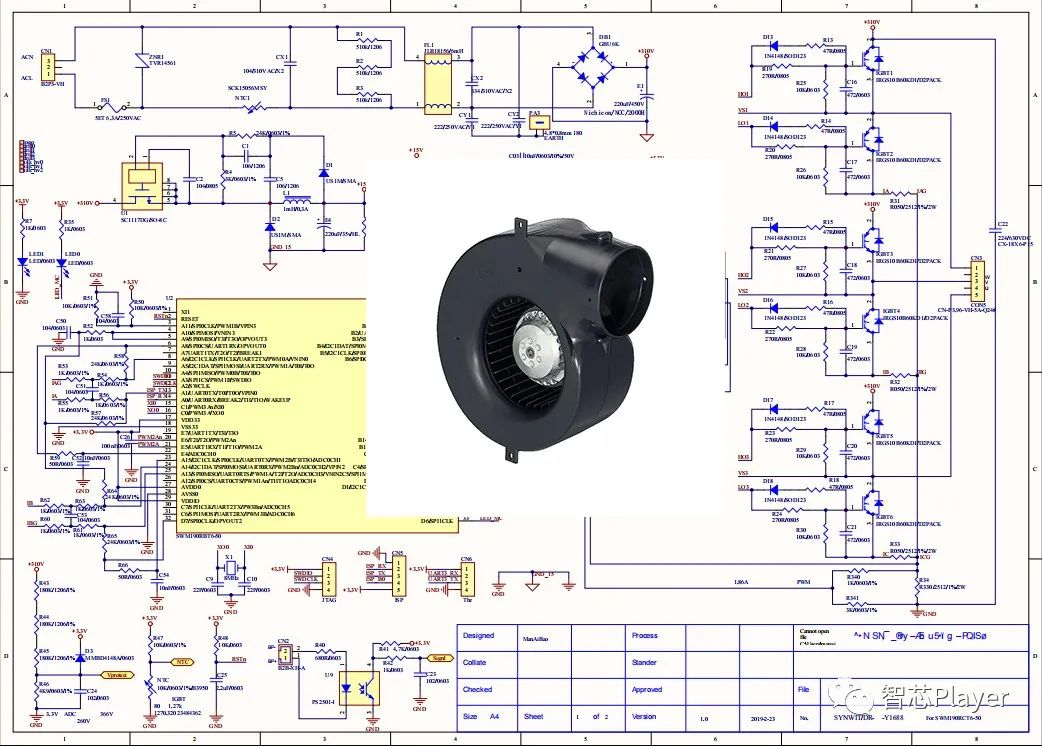
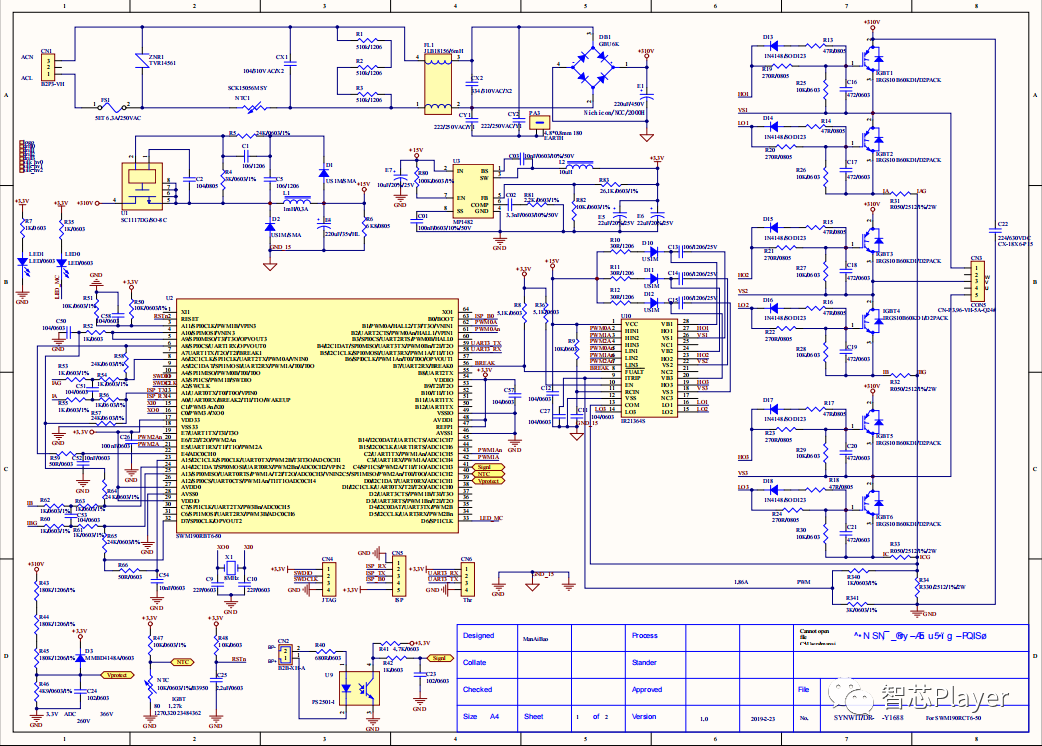
控制器采用的是一顆國產(chǎn)M0芯片-SWM190RBT6-50,封裝是LQFP64。電路包含AC轉(zhuǎn)DC電路,直流電機(jī)是高壓310V,然后通過SC1117DG轉(zhuǎn)成低壓15V,再由MP1482變成3.3V。電機(jī)的柵極驅(qū)動芯片是IR21364S來控制WVU三路之間的通斷,上下臂是通過IGBT,RGS10B60KD1/D2PACK來開關(guān)。除此之外還包含一些光耦,LED的常用的電子元器件。
本方案缺失PCB源文件,但是不影響配套程序的相關(guān)閱讀及學(xué)習(xí),本方案的主要用于學(xué)習(xí)觀測器,鎖相環(huán),PID算法,SVPWM無感FOC算法以及五段式與七段式調(diào)制。
軟件方案
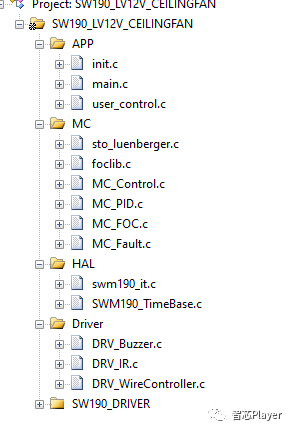

軟件方案包含了工程文件,無需自己再搭建工程。用的IDE是MDK,小編給大家編譯了一下,沒有錯誤可以直接運(yùn)行。包含龍伯格電機(jī)觀測器,無感FOC算法,PID調(diào)節(jié)代碼,整套報錯信息,順逆風(fēng)啟動算法,雖然是基于國產(chǎn)M0的代碼,但是代碼本身耦合性做的很好,完全可以移植到別的MCU平臺上面去,同時也是非常適合對電機(jī)算法感興趣的小伙伴認(rèn)真閱讀一番。以下貼一段龍伯格觀測器的代碼出來:
/******************************************************************************* * Function Name : Speed_PI * Description : It implements the PLL PI regulator. * Input : (B-emf alpha)*sin(theta),(B-emf beta)*cos(theta). * Output : None. * Return : Motor speed (dpp, digit-per-pwm). *******************************************************************************/ s16 Speed_PI(s16 hAlfa_Sin, s16 hBeta_Cos) { s32 wSpeed_PI_error, wOutput; s32 wSpeed_PI_proportional_term, wSpeed_PI_integral_term; wSpeed_PI_error = hBeta_Cos - hAlfa_Sin; #if 1 //???? if(wSpeed_PI_error > 50) wSpeed_PI_error = 50; else if(wSpeed_PI_error < -50) wSpeed_PI_error = -50; #endif wSpeed_PI_proportional_term = hSpeed_P_Gain * wSpeed_PI_error; // !!!p wSpeed_PI_integral_term = hSpeed_I_Gain * wSpeed_PI_error; // !!!i if ( (wSpeed_PI_integral_sum >= 0) && (wSpeed_PI_integral_term >= 0) && (Max_Speed_Out == FALSE) ) { if ((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) < 0) { wSpeed_PI_integral_sum = S32_MAX; } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } } else if ( (wSpeed_PI_integral_sum <= 0) && (wSpeed_PI_integral_term <= 0) && (Min_Speed_Out == FALSE) ) { if((s32)(wSpeed_PI_integral_sum + wSpeed_PI_integral_term) > 0) { wSpeed_PI_integral_sum = -S32_MAX; } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } } else { wSpeed_PI_integral_sum += wSpeed_PI_integral_term; //integral } wOutput = (wSpeed_PI_proportional_term >> 14) + (wSpeed_PI_integral_sum >> 18); if (wOutput > wMotorMaxSpeed_dpp) { Max_Speed_Out = TRUE; wOutput = wMotorMaxSpeed_dpp; } else if (wOutput < (-wMotorMaxSpeed_dpp)) { Min_Speed_Out = TRUE; wOutput = -wMotorMaxSpeed_dpp; } else { Max_Speed_Out = FALSE; Min_Speed_Out = FALSE; } return ((s16)wOutput); }
審核編輯:湯梓紅
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
二極管
+關(guān)注
關(guān)注
147文章
9570瀏覽量
165883 -
驅(qū)動電路
+關(guān)注
關(guān)注
152文章
1520瀏覽量
108368 -
FOC
+關(guān)注
關(guān)注
20文章
318瀏覽量
42650
發(fā)布評論請先 登錄
相關(guān)推薦
ST FOC 4.2的庫如何實(shí)現(xiàn)風(fēng)機(jī)的順逆風(fēng)啟動?
如題,想請教ST FOC 4.2的庫如何實(shí)現(xiàn)風(fēng)機(jī)的順逆風(fēng)啟動。希望路過的大俠能指點(diǎn)一下。
發(fā)表于 05-06 06:24
基于XE160的無霍爾FOC風(fēng)機(jī)控制方案201208MC_FANE
項(xiàng)目名稱:基于XE160的無霍爾FOC風(fēng)機(jī)控制方案項(xiàng)目合作模式:1、免費(fèi)提供軟件、硬件方案級技術(shù)支持,芯片從軟硬件支持方采購;2、直接購買:
發(fā)表于 12-03 14:20
低成本FOC風(fēng)機(jī)控制方案201208MC_FANB
項(xiàng)目名稱:低成本FOC風(fēng)機(jī)控制方案 項(xiàng)目介紹:該方案適合應(yīng)用于DC286V供電環(huán)境, 用于風(fēng)機(jī)的控制。 主控MCU采用英飛凌的SAF-XC8
發(fā)表于 12-10 10:05
英飛凌基于XMC1300的無感FOC風(fēng)機(jī)參考方案
2013年11月1日——英飛凌科技股份公司(FSE: IFX / OTCQX: IFNNY)今天宣布推出基于XMC1300的無感磁場定向控制(FOC)風(fēng)機(jī)參考方案,以及相配套的30W高壓應(yīng)用套件
發(fā)表于 12-11 10:54
收藏備用:FOC電機(jī)控制設(shè)計(jì)方案匯總下載
:自動調(diào)優(yōu)無傳感器 FOC 解決方案針對繞組電阻變化進(jìn)行電機(jī)溫度估算,以保護(hù)電機(jī)在臨時過載情況下免受損壞相關(guān)文件下載:2、基于英飛凌XMC1300的無感FOC風(fēng)機(jī)參考
發(fā)表于 10-22 16:29
BLDC風(fēng)機(jī)市場逐年攀升,盤點(diǎn)幾款解決方案
,比如追覓、素士、直白、徠芬、康夫等等。基于逐漸增長的風(fēng)機(jī)市場,今天就為大家盤點(diǎn)幾款風(fēng)機(jī)解決方案。01.EBM 解決方案配有應(yīng)用 EC 技術(shù)的 S3G400
發(fā)表于 05-27 14:03
什么是FOC?帶你看看無傳感器FOC的BLDC電機(jī)驅(qū)動芯片及解決方案
化的技術(shù)路徑在芯片架構(gòu)層面實(shí)現(xiàn)復(fù)雜的電機(jī)驅(qū)動控制算法,形成自主知識產(chǎn)權(quán)的電機(jī)驅(qū)動控制處理器內(nèi)核ME。在該技術(shù)下,峰岹科技設(shè)計(jì)的芯片可實(shí)現(xiàn)電機(jī)控制 FOC 算法,6~7us 即可完成一次
發(fā)表于 06-10 11:40
SWM190系列MCU數(shù)據(jù)手冊
和最大 20K 字節(jié)的 SRAM。此外,芯片支持 ISP(在系統(tǒng)編程)操作及 IAP(在應(yīng)用編程),用戶可自定義 BOOT 程序。SWM190 外設(shè)串行總線包括多個 UART 接口、SPI 通信接口(支持
發(fā)表于 09-14 07:16
英飛凌推出基于XMC1300的無感FOC風(fēng)機(jī)參考方案
2013年11月1日——英飛凌科技股份公司(FSE: IFX / OTCQX: IFNNY)今天宣布推出基于XMC1300的無感磁場定向控制(FOC)風(fēng)機(jī)參考方案,以及相配套的30W高壓應(yīng)用套件
發(fā)表于 11-01 10:25
?2787次閱讀
華芯微特SWM341系列微控制器主要性能 SWM34SRT6-50顯示驅(qū)動應(yīng)用
本文介紹了華芯微特SWM341系列主要性能,和其系列之一的SWM34SRET6-50驅(qū)動4.3寸800*480 TFTLCD顯示的例程應(yīng)用。
風(fēng)機(jī)無傳感器控制方案用戶手冊
通過該手冊可以了解到的信息有:風(fēng)機(jī)無感 FOC 控制的硬件情況、控制系統(tǒng)的軟件框架、軟件 功能、軟件結(jié)構(gòu)、以及控制方案中的數(shù)據(jù)處理方式,同時還能夠了解到如何進(jìn)行相關(guān)參數(shù)的測 試與計(jì)算以及使用風(fēng)
發(fā)表于 09-30 16:36
?0次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論