 機器視覺里的光學知識科普
機器視覺里的光學知識科普
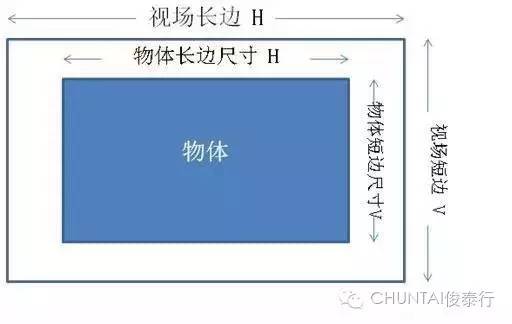
視場
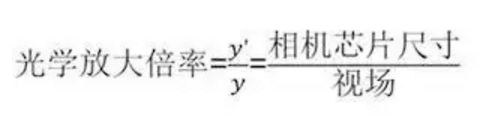
視場(FOV)也稱視野,是指能被視覺系統觀察到的物方可視范圍。對于鏡頭而言,可觀察到的視場跟鏡頭放大倍率及相機芯片選擇有關。因此通常建議客戶根據被觀察物體的尺寸,先確定所需的視場,再確定相機芯片尺寸及鏡頭放大倍率。在實際工程項目中,考慮到機械誤差等問題,視場通常要大于待觀測物體的實際尺寸,以確保在機械誤差的范圍內,物體始終位于視覺系統的可視范圍內。

分辨率
分辨率定義為:能被分辨開來的兩個物點(或像點)之間的最小距離,稱為鏡頭的物方分辨率,記為Resolution(物)(或像方分辨率,記為Resolution(像))。單位為μm。
Resolution(物) = 0.61 x Wavelength/NA=1.22 x Wavelength x Fno.
Resolution(像) = 鏡頭放大倍率x Resolution(物)
解像力定義為:1mm內的黑白線對數, 記為Resolving power。單位為line/mm或lp/mm.
Resolving power = 1/ Resolution(像)
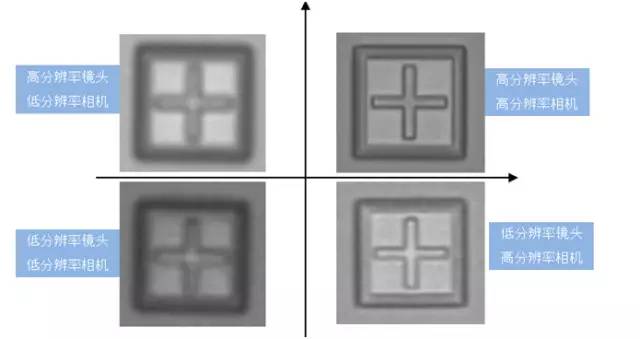
提到分辨率,大部分工程師會想到相機分辨率,而忽略鏡頭的分辨率對最終成像效果也起到關鍵作用。事實上,只有鏡頭分辨率和相機分辨率匹配,才能得到最佳成像效果。下圖直觀的表示出鏡頭和相機匹配對成像效果的影響。
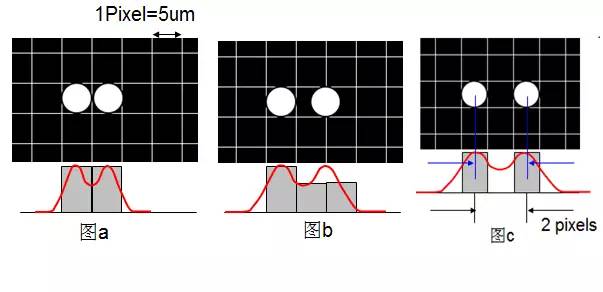
那么鏡頭分辨率跟相機分辨率如何才能匹配呢?我們知道,物體是成像在相機芯片上的,物方的兩個點,經過鏡頭系統成像在相機芯片上的最小距離,只有如圖c所示時才能被分辨開來。若物方兩點成像在芯片上的距離如圖a, 圖b所示時,這兩點都不能被分辨開來。因此鏡頭的像方分辨率=2x像元尺寸時,說明此時鏡頭分辨率與相機完全匹配。如相機像元尺寸為5um, 鏡頭放大倍率為0.5倍。則有Resolution(物)=2x5μm/0.5=20μ m時,鏡頭與相機完全匹配。若Resolution(物)<20μm, 說明此時鏡頭過好,相機分辨率將成為系統的限制;若Resolution(物)>20μm, 說明此時相機過好,鏡頭分辨率將成為系統限制。
另外,鏡頭的物方分辨率與產品的精度也常被工程師混淆。
精度指的是測量值與真實值之間的差異。如產品真實值為1.0mm, 要求精度為±5μm, 則說明只要測量出的值在0.995mm~1.005mm間即為合格品。在機器視覺中通常根據客戶的FOV和精度要求算出相機的分辨率(如200萬像素),相機一旦選定,則相機的像元尺寸(如4.65μm)也確定了。選鏡頭時即可根據上面的方法來選擇分辨率匹配此相機的鏡頭,從而保證系統的精度要求。
而如果客戶描述的是需要觀察到物方大小為5μm的目標,則要求鏡頭的物方分辨率必須<10μm。
法蘭距離及鏡頭接口
今天先給大家介紹一下法蘭距離,繼而介紹茉麗特鏡頭(或搭配的相機)中常見的幾種接口,以及加接圈的原則和意義。
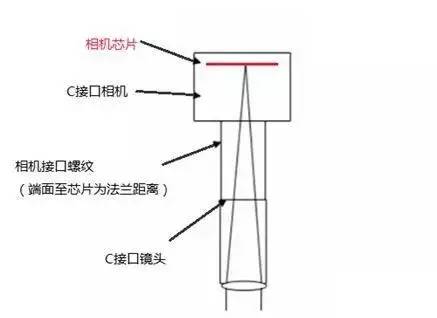
所謂法蘭距離,就是指相機機身與鏡頭接觸的機械面到相機芯片之間的距離。鏡頭的后截距需和相機的法蘭距離對應,才能讓光線聚焦在相機芯片上。
通常,工業相機接口有C接口、CS接口、F接口、M72接口、M95接口等等。除F接口外,其他接口一般用螺紋的尺寸規格去定義,并且會有特定的法蘭距離,而F接口則為卡扣式的接口。
以C接口為例,它的螺紋規格是1英寸直徑,螺紋是32牙/英寸,可以兼容使用于最大4/3”芯片的工業相機(對角線長度約22.6mm)。C接口相機的法蘭距離為17.526mm,需配合C接口的鏡頭使用,如下圖——
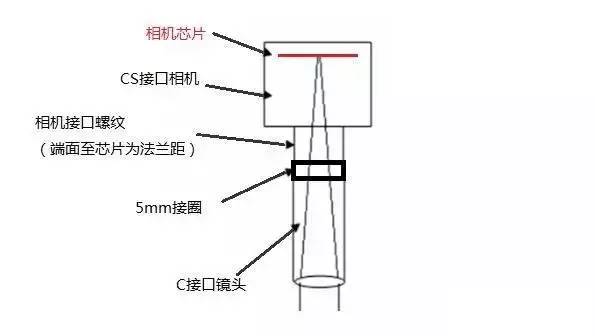
而CS接口,螺紋規格和C接口相同,但是法蘭距離為12.526mm,比C接口短5mm,因此 C接口鏡頭配合CS接口相機時,需要加一個5mm的接圈,否則成像位置會在芯片之后,如下圖——
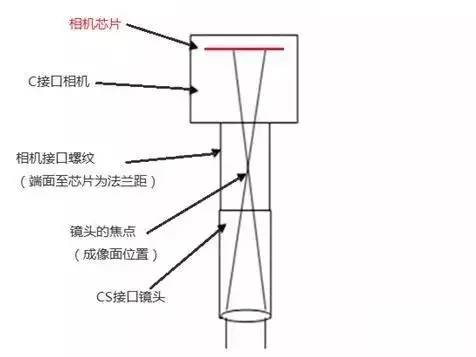
值得注意的是,如果要成像,必須保證鏡頭設計的法蘭距離大于相機的法蘭距離。例如,如果一個CS接口鏡頭,搭配一個C接口的相機,就會出現以下情形而無法使用——
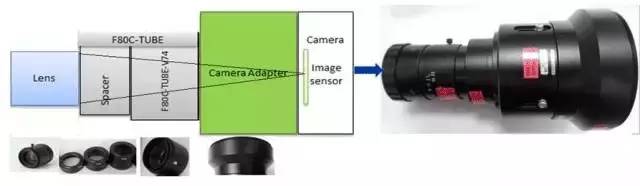
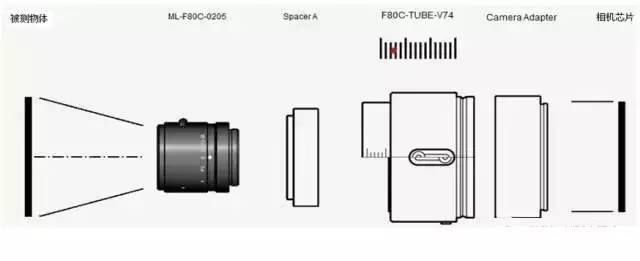
對于線掃鏡頭或大面陣鏡頭,通常其后截距比較大, 這樣也可以兼容市面上的各種不同法蘭距離的線掃描/大面陣相機。例如下圖是茉麗特的F80C系列鏡頭的接圈方式,通過加不同厚度的接圈,可以與法蘭距離為46.5mmF口相機,或法蘭距離僅有6.56mm的M72接口相機及其他更多的相機匹配。使用時,我們需要根據所選用相機的型號去選擇對應的接圈方式,因此通常情況下,線掃鏡頭的接圈的接法會相對復雜。
對于每個系列的線掃鏡頭產品,我們都會注明接圈的方式。如有疑問,歡迎聯系我們的技術支持。
畸變
畸變作為光學系統中經常提到的一個參數,是限制光學量測準確性的重要因素之一。它是光學系統對物體所成的像相對于物體本身而言的失真程度,只引起像的變形,對像的清晰度并無影響。
對于理想光學系統,在一對共軛的物像平面上,放大率是常數。但是對于實際的光學系統,僅當視場較小時具有這一性質,而當視場較大或很大時,像的放大率就要隨視場而異,這樣就會使像相對于物體失去相似性。這種使像變形的成像缺陷稱為畸變。
畸變定義為實際像高與理想像高差,而在實際應用中經常將其與理想像高之比的百分數來表示畸變,稱為相對畸變,即
有畸變的光學系統,若對等間距的同心圓物面成像,其像將是非等間距的同心圓。當系統具有正畸變時,實際像高隨視場的增大比理想像高增大得快,即放大倍率隨視場的增大而增大,則同心圓的間距自內向外逐漸增大;反之,當為負畸變時,圓的間距自內向外逐漸減小。對于普通的光學鏡頭,只要感覺不出它所成像的變形,這種成像缺陷就可忽略;但是對于某些要利用像來測定物體大小尺寸的應用,畸變的影響就非常重要了,它直接影響測量精度。
普通工業鏡頭的畸變一般在1%~2%,這樣的畸變通常會影響檢測精度(例如實際長度為100mm的物體,使用這種鏡頭測得的尺寸可能是101mm~102mm;而我們BTOS遠心光學的雙遠心鏡頭,畸變一般都小于0.1%,畸變系數為普通鏡頭的1/20,大大提高了檢測精度和穩定性,達到了目前最高標準光學測試儀器的測量極限。
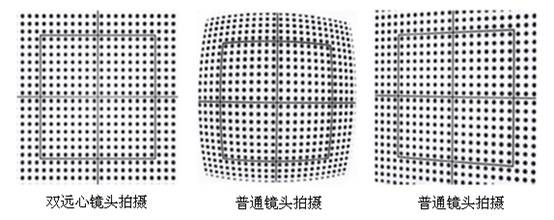
左圖為雙遠心鏡頭拍攝的畸變測試圖,完全無徑向畸變或梯形畸變;中圖為明顯徑向畸變;右圖為明顯梯形畸變。
審核編輯:湯梓紅
-
鏡頭
+關注
關注
2文章
503瀏覽量
25618 -
相機
+關注
關注
4文章
1344瀏覽量
53504 -
分辨率
+關注
關注
2文章
1043瀏覽量
41881 -
機器視覺
+關注
關注
161文章
4343瀏覽量
120106
原文標題:機器視覺光學基礎概念系列——視場、分辨率、法蘭距離、鏡頭接口、畸變
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦







 工商網監
工商網監
評論