 有源功率因數校正(APFC)電路拓撲方法以及仿真設計
有源功率因數校正(APFC)電路拓撲方法以及仿真設計
1. APFC的系統構成
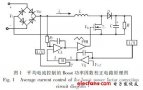
按照要求,可將系統劃分為滯環電流控制、Boost、PI控制三個主要部分,系統的整體框架如圖所示,
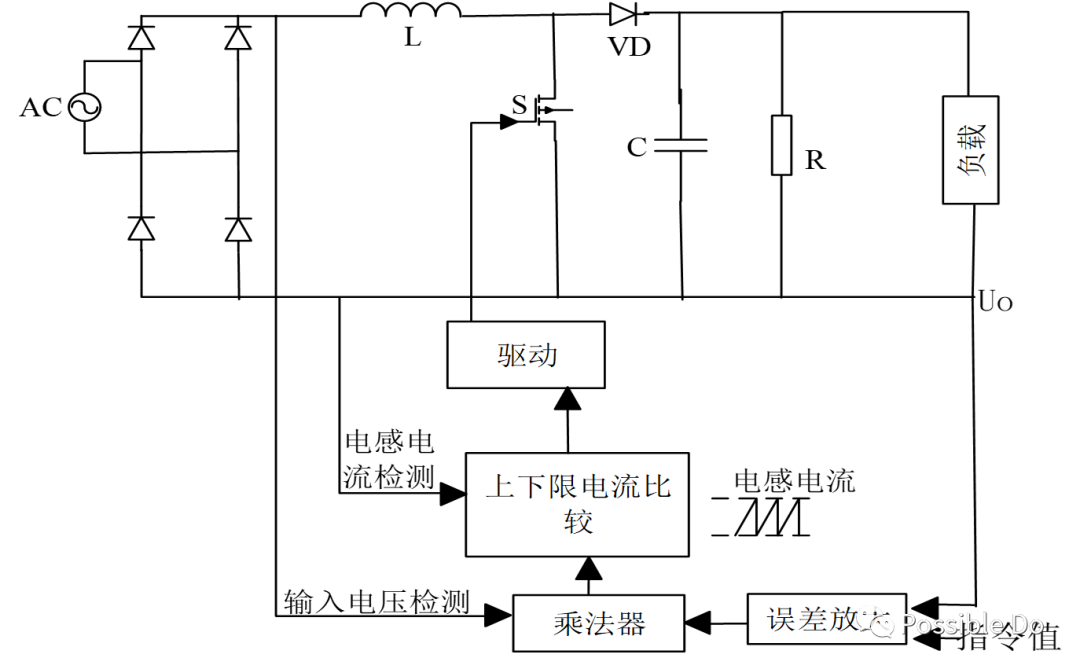
以Boost電路為主體,滯環電流控制部分為控制核心,通過控制開關管的通斷,調節占空比將產生的信號中所帶有的高次諧波濾去,再采集輸出信號至PI控制部分,對輸出的信號進行穩定與修正,從而達到輸出穩定的電壓,輸入電流正弦化的目的。
其中,boost下方電路是控制電路,其中包含了電壓誤差放大器VA和指令電壓值,電流誤差放大器CA,乘法器和驅動器。輸出的直流電壓和指令電壓值比較后,輸入差值到電壓誤差放大器中,二極管整流后的電壓除以其峰值后,與電壓誤差放大器輸出的直流量分別作為乘法器的兩個輸入端,我們用乘法器的輸出當做電流反饋控制的指令值信號,與電感電流檢測比較后,經過電流誤差放大器加到驅動器,以控制開關的通斷,從而使輸入電流的波形與整流電壓的波形基本一致,使電流諧波大為減少,提高功率因數。
2. APFC之PI控制
Pi即比例-積分控制,是一種線性控制方法。它是將給定值與實際輸出值比較得到的控制偏差,并對偏差進行比例和積分計算,再通過比例項和積分項線性組合形成控制信號,對受控對象進行控制。

其中,比例控制是一種最簡單的控制方式。其控制器的輸出與輸入誤差信號成比例關系。當僅有比例控制時系統輸出存在穩態誤差。而在比例控制中,加入“積分項”,可以消除穩態誤差。
時間的積分是積分項對誤差到控制量的主要影響因素。隨著時間的增加,積分項會增大。即使其誤差很小,積分項也會隨著時間的推移而增大,導致控制器輸出增加,從而使穩態誤差進一步降低到零。
因此,PI(比例-積分)控制器可以使系統進入穩態后無穩態誤差。
舉個栗子:
假設有一個水缸,最終的控制目的是要保證水缸里的水位永遠的維持在1米的高度。假設初試時刻,水缸里的水位是0.2米,那么當前時刻的水位和目標水位之間是存在一個誤差的error,且error為0.8.這個時候,假設旁邊站著一個人,這個人通過往缸里加水的方式來控制水位。
u=kp*error
當考慮另外一種情況,假設這個水缸在加水的過程中,存在漏水的情況,假設每次加水的過程,都會漏掉0.1米高度的水。
仍然假設kp取0.5,那么會存在著某種情況,假設經過幾次加水,水缸中的水位到0.8時,水位將不會再變換。因為,水位為0.8,則誤差error=0.2. 所以每次往水缸中加水的量為u=0.5*0.2=0.1.同時,每次加水缸里又會流出去0.1米的水!!!加入的水和流出的水相抵消,水位將不再變化。也就是說,我的目標是1米,但是最后系統達到0.8米的水位就不在變化了,且系統已經達到穩定。由此產生的誤差就是穩態誤差了。 (在實際情況中,這種類似水缸漏水的情況往往更加常見,比如控制汽車運動,摩擦阻力就相當于是“漏水”,控制機械臂、無人機的飛行,各類阻力和消耗都可以理解為本例中的“漏水”) 因此,單獨的比例控制,在很多時候并不能滿足要求。
這個時候的控制量,除了比例的那一部分,還有一部分就是一個系數ki乘以這個積分項。由于這個積分項會將前面若干次的誤差進行累計,所以可以很好的消除穩態誤差(假設在僅有比例項的情況下,系統卡在穩態誤差了,即上例中的0.8,由于加入了積分項的存在,會讓輸入增大,從而使得水缸的水位可以大于0.8,漸漸到達目標的1.0.)這就是積分項的作用。
3.APFC之滯環控制

滯環電流控制法存在一個滯環寬度的概念,其中寬度上限可以約束電感電流的最大值,寬度下限則是可以約束電感電流的最小值。簡單來說就是通過給電感電流一個上下限,將其約束在一個范圍內。

滯環電流控制的優點:
(1)不需要斜坡補償;
(2)輸入電流諧波含量少;
缺點:
(1)開關頻率不恒定;
(2)必須要對電感電流進行采樣;
(3)易受到整流噪音的干擾。
①系統架構圖

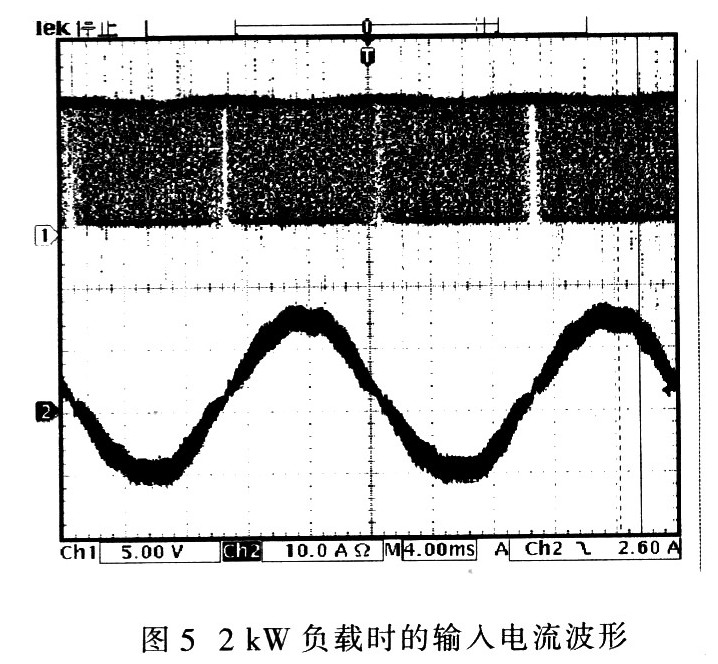
②輸入電壓為220V的交流側電壓與電流波形圖
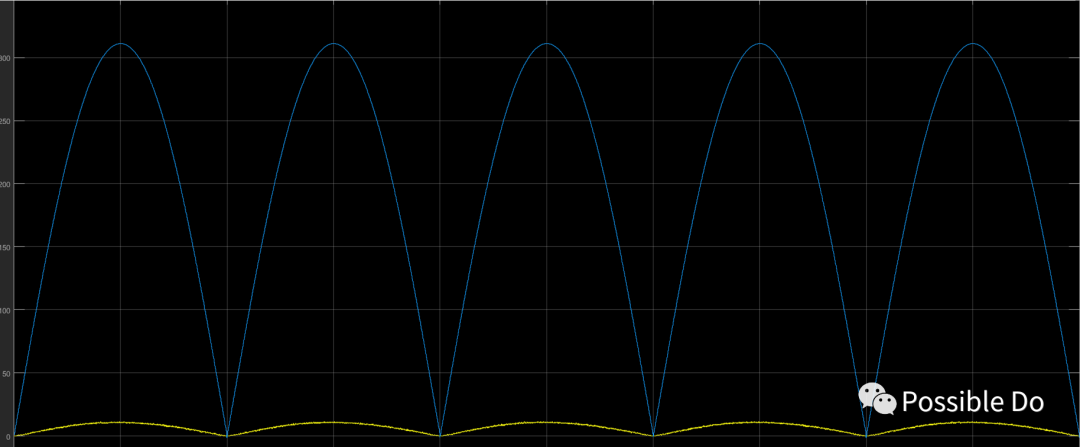
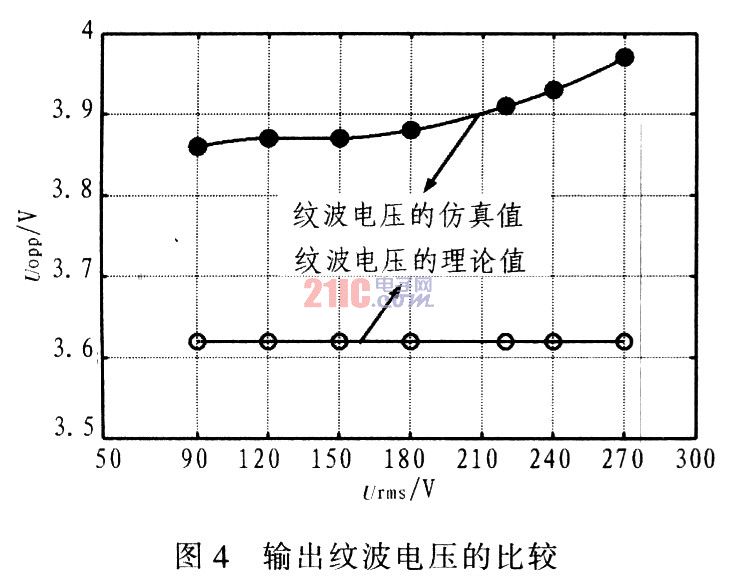
③輸入電壓為220V的直流電壓波形圖

-
驅動器
+關注
關注
52文章
8164瀏覽量
146033 -
誤差放大器
+關注
關注
9文章
98瀏覽量
34926 -
電感電流
+關注
關注
0文章
88瀏覽量
11065 -
PI控制器
+關注
關注
1文章
25瀏覽量
11373 -
APFC電路
+關注
關注
0文章
4瀏覽量
7864
發布評論請先 登錄
相關推薦
采用UC3854的有源功率因數校正電路工作原理與應用
電子鎮流器功率因素校正電路APFC的分析
電壓臨界工作模式的有源功率因數校正原理設計







 工商網監
工商網監
評論